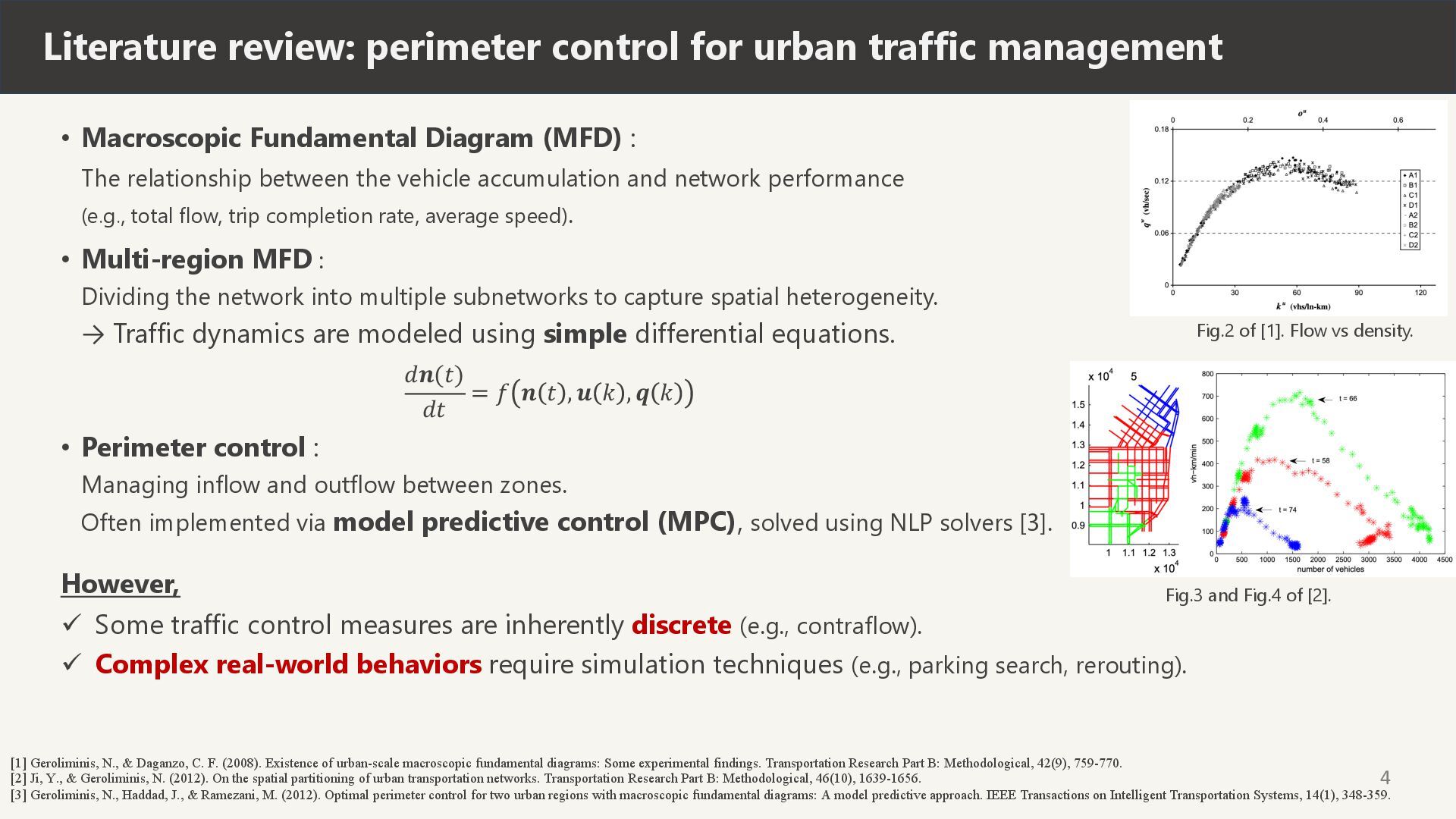
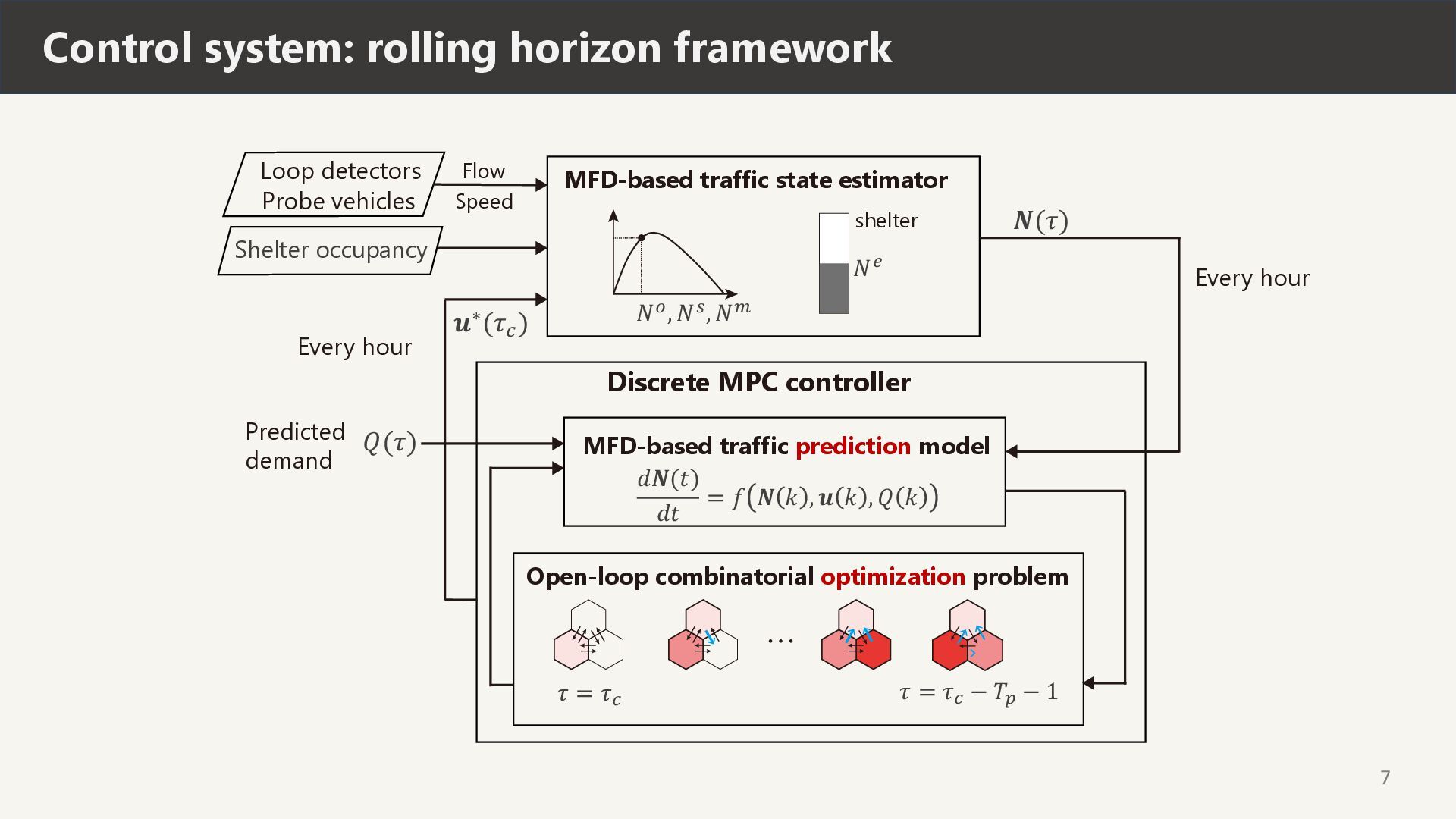
vehicle accumulation and network performance (e.g., total flow, trip completion rate, average speed). • Multi-region MFD : Dividing the network into multiple subnetworks to capture spatial heterogeneity. → Traffic dynamics are modeled using simple differential equations. 𝑑𝒏(𝑡) 𝑑𝑡 = 𝑓 𝒏 𝑡 , 𝒖 𝑘 , 𝒒 𝑘 • Perimeter control : Managing inflow and outflow between zones. Often implemented via model predictive control (MPC), solved using NLP solvers [3]. 4 Literature review: perimeter control for urban traffic management Fig.2 of [1]. Flow vs density. Fig.3 and Fig.4 of [2]. [1] Geroliminis, N., & Daganzo, C. F. (2008). Existence of urban-scale macroscopic fundamental diagrams: Some experimental findings. Transportation Research Part B: Methodological, 42(9), 759-770. [2] Ji, Y., & Geroliminis, N. (2012). On the spatial partitioning of urban transportation networks. Transportation Research Part B: Methodological, 46(10), 1639-1656. [3] Geroliminis, N., Haddad, J., & Ramezani, M. (2012). Optimal perimeter control for two urban regions with macroscopic fundamental diagrams: A model predictive approach. IEEE Transactions on Intelligent Transportation Systems, 14(1), 348-359. However, ü Some traffic control measures are inherently discrete (e.g., contraflow). ü Complex real-world behaviors require simulation techniques (e.g., parking search, rerouting).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}