Plenary talk slides from IEEE SII 2026 in Cancun, Mexico (Jan 13, 2026).
https://sice-si.org/SII2026/plenary-sessions/
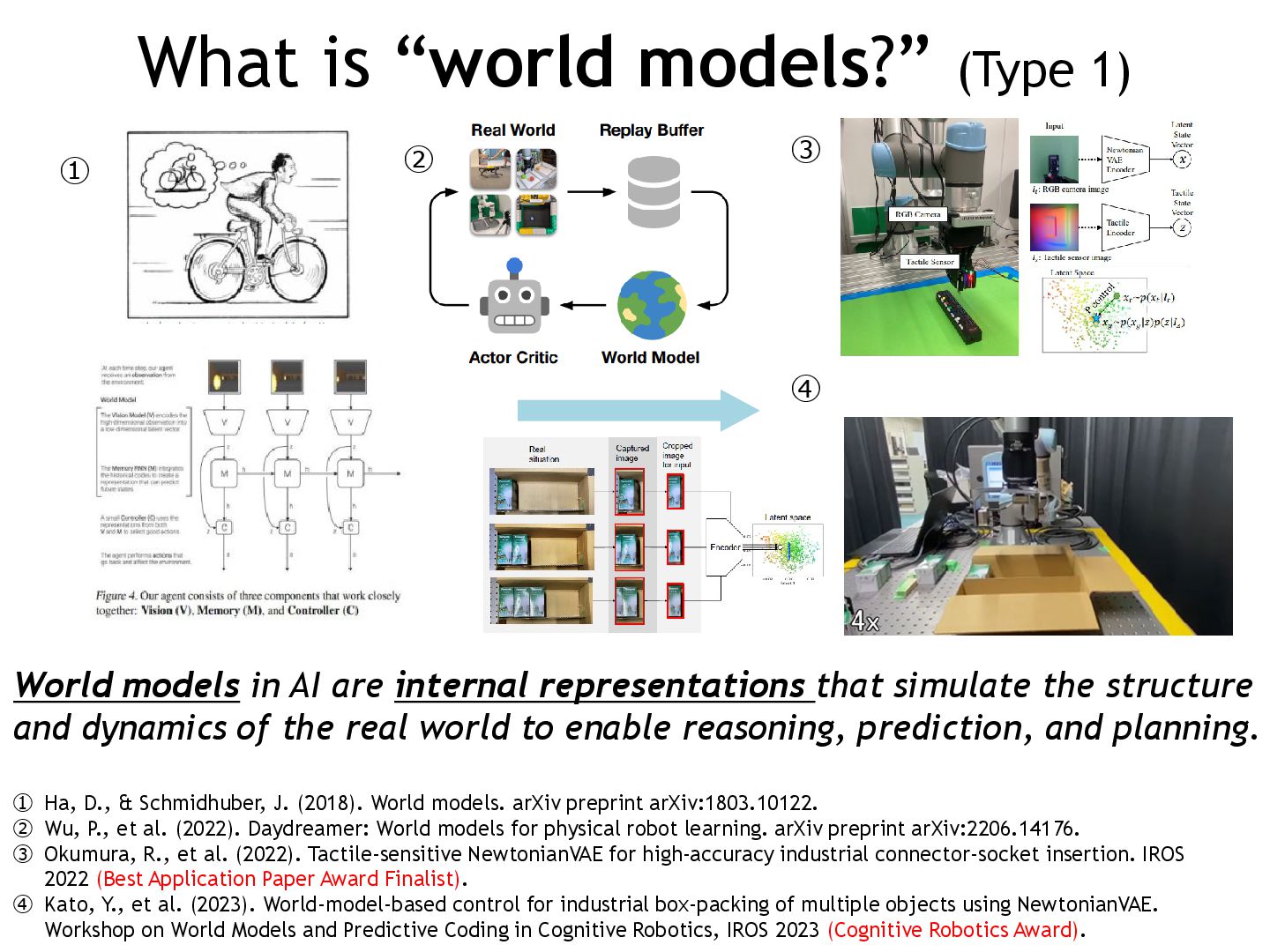
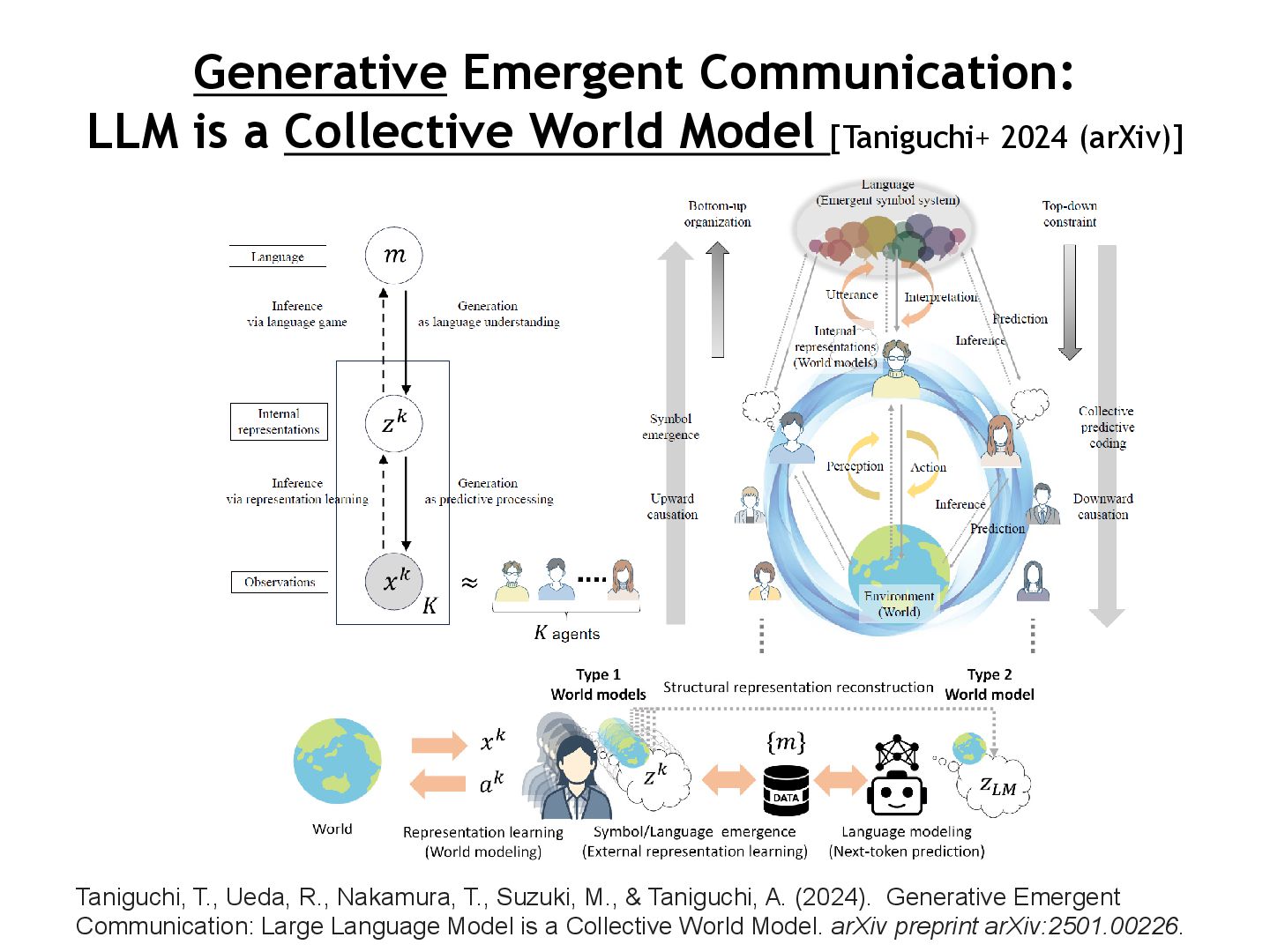
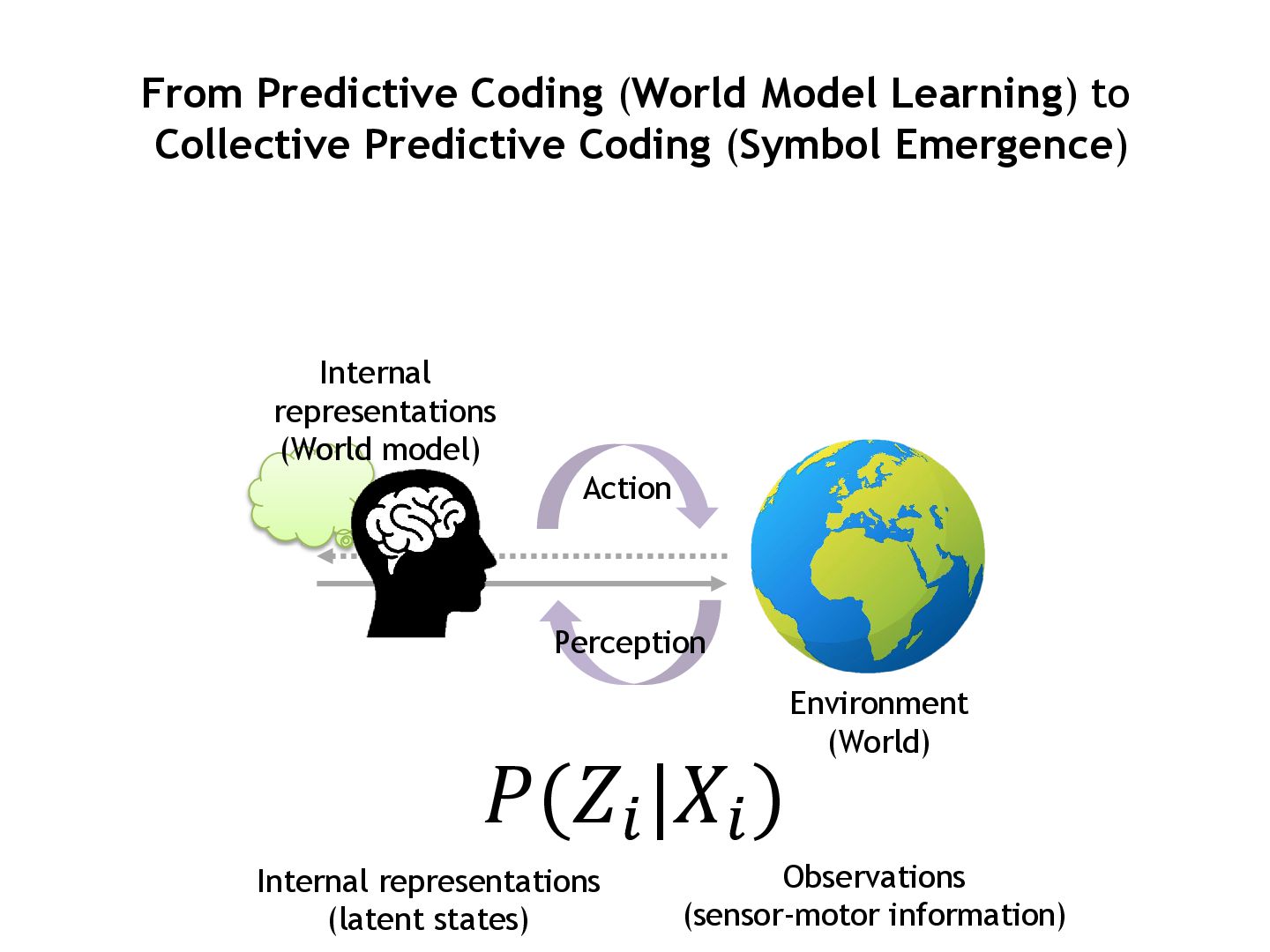
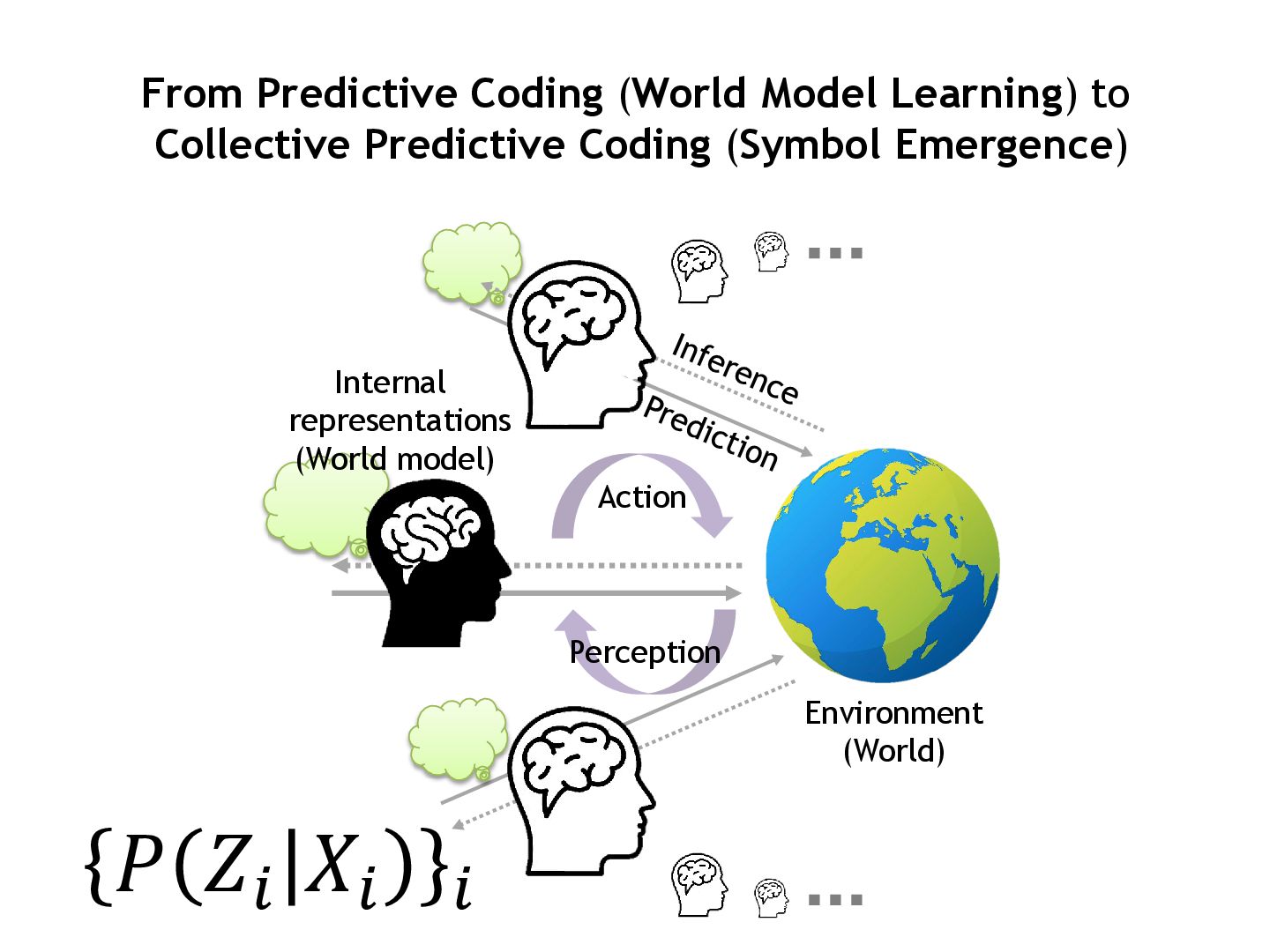
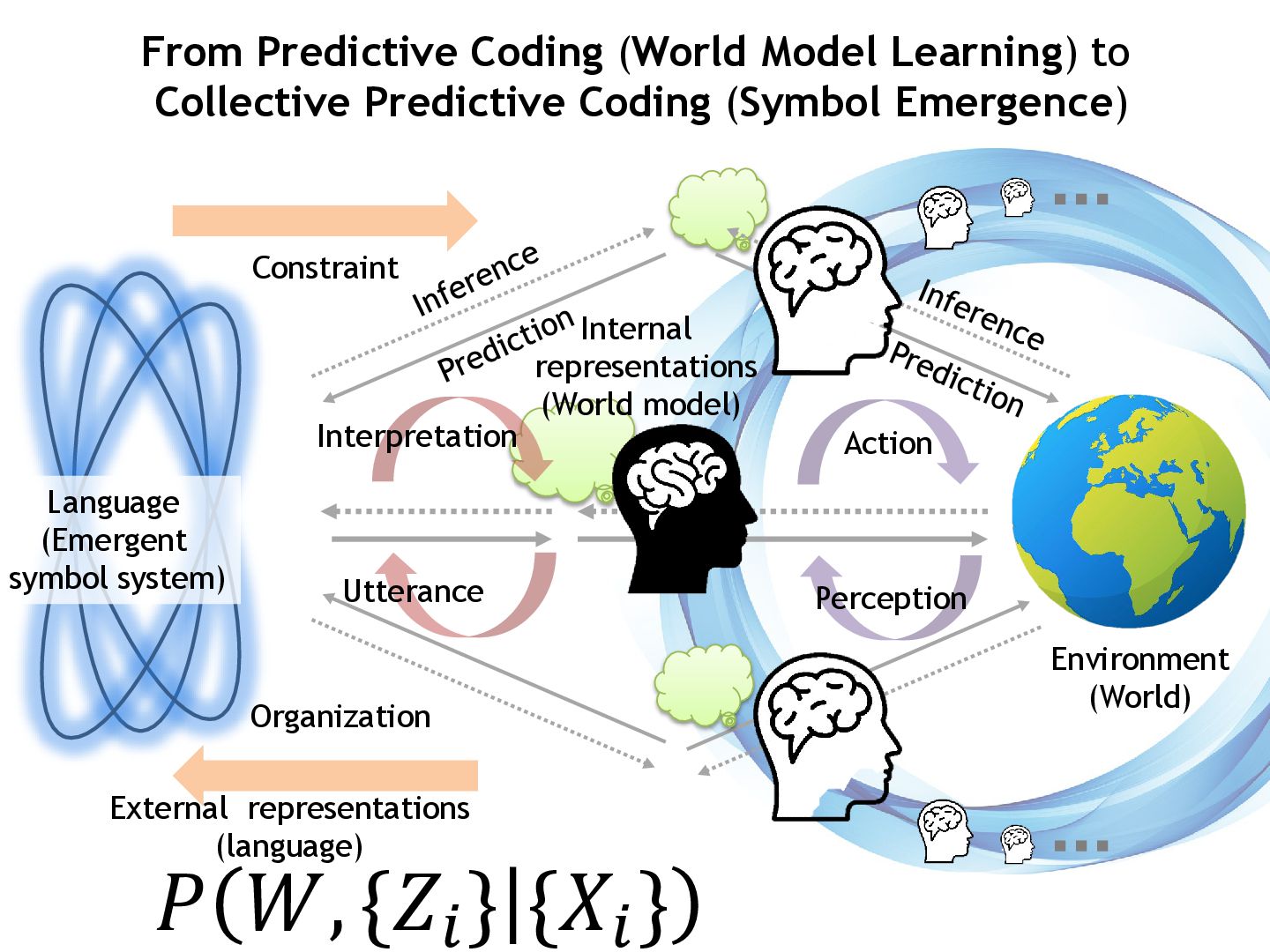
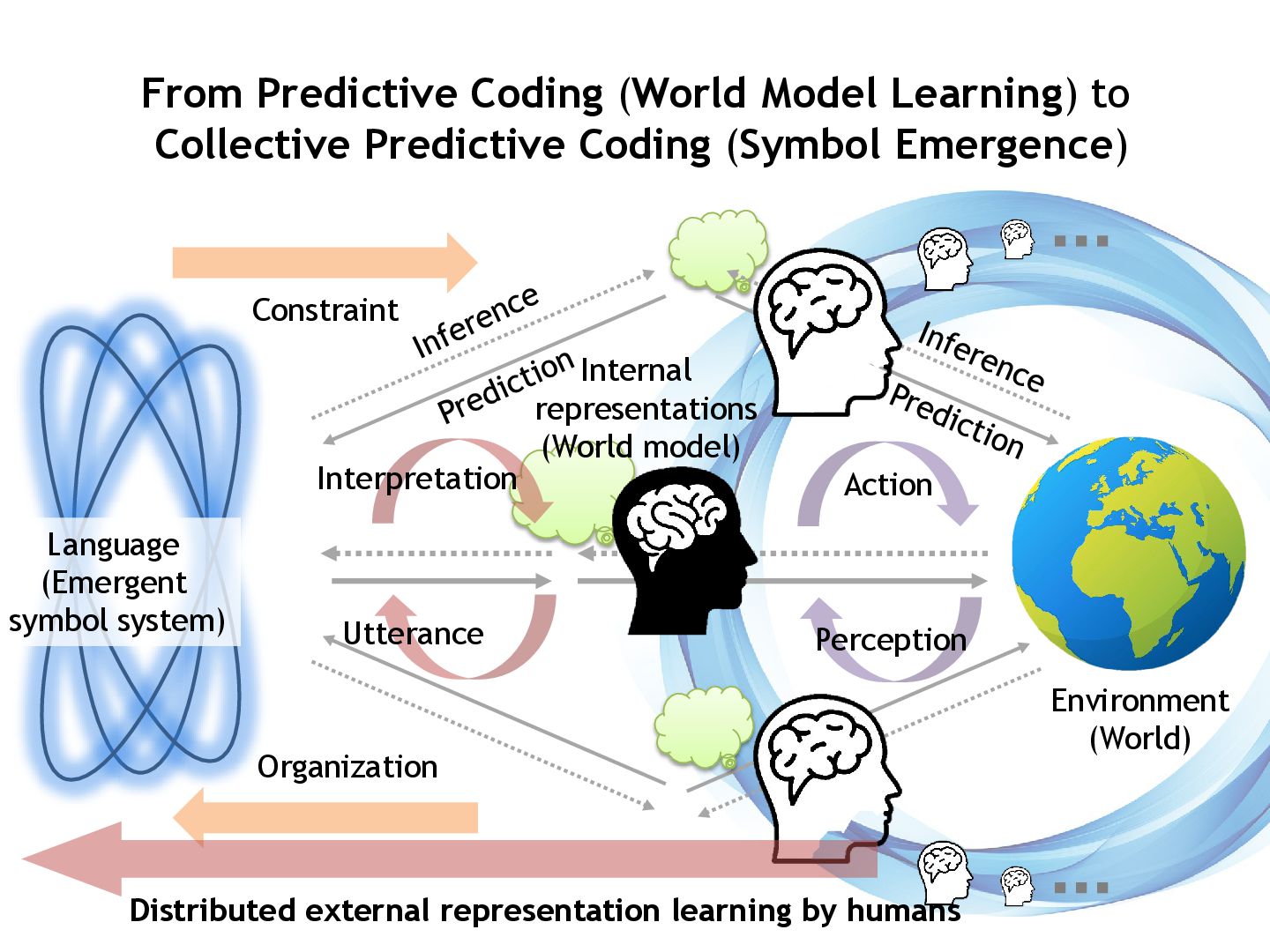
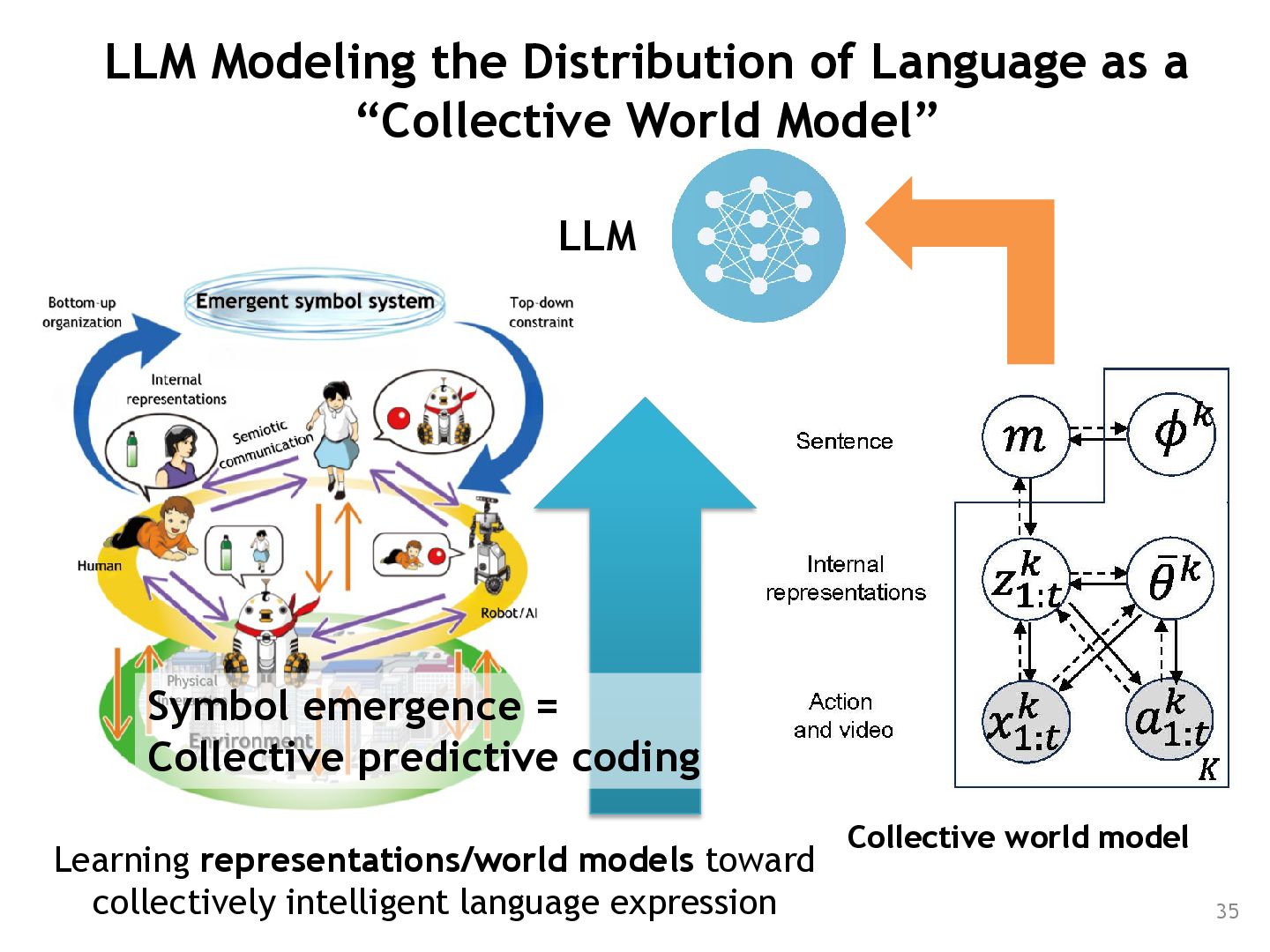
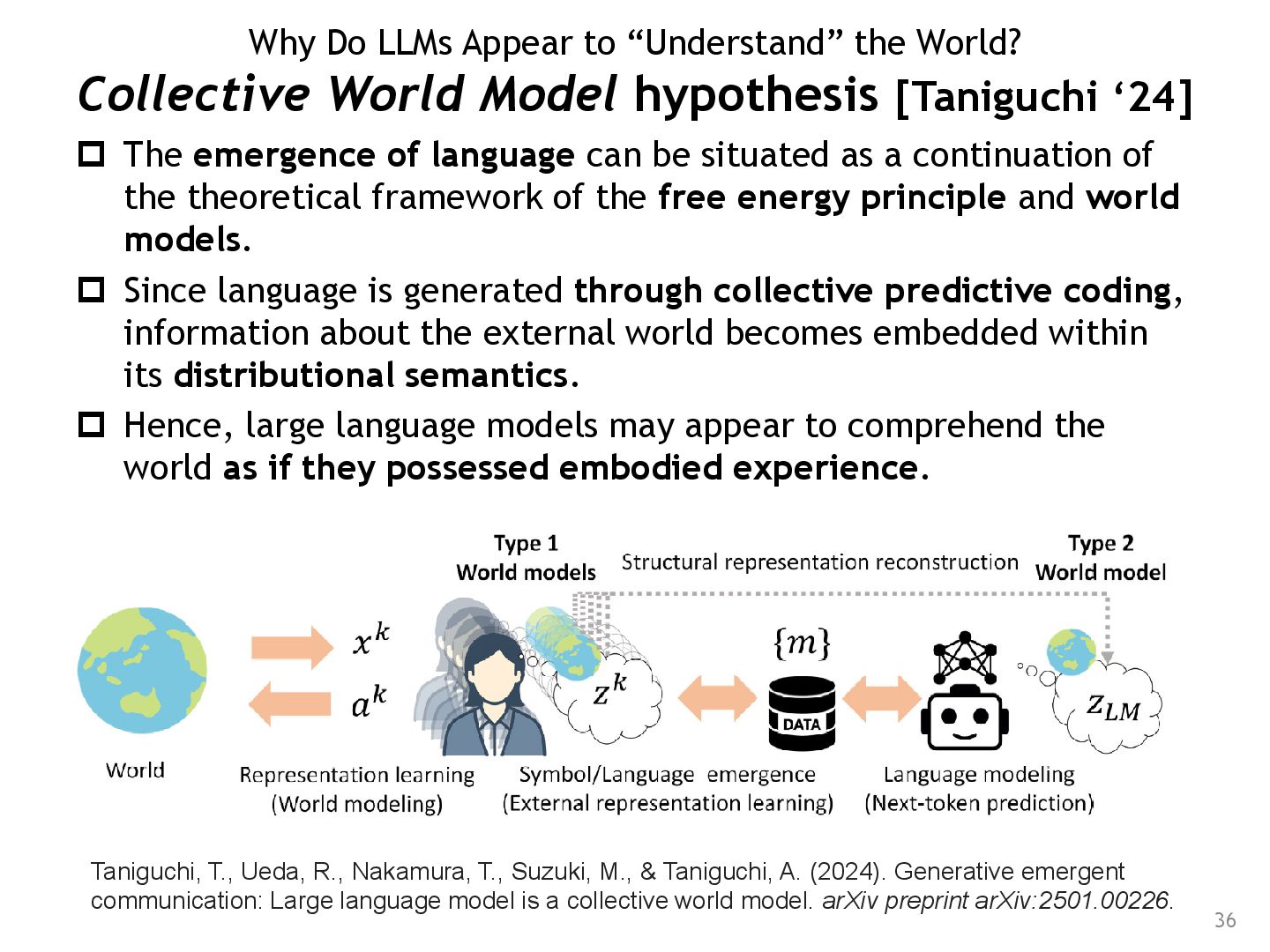
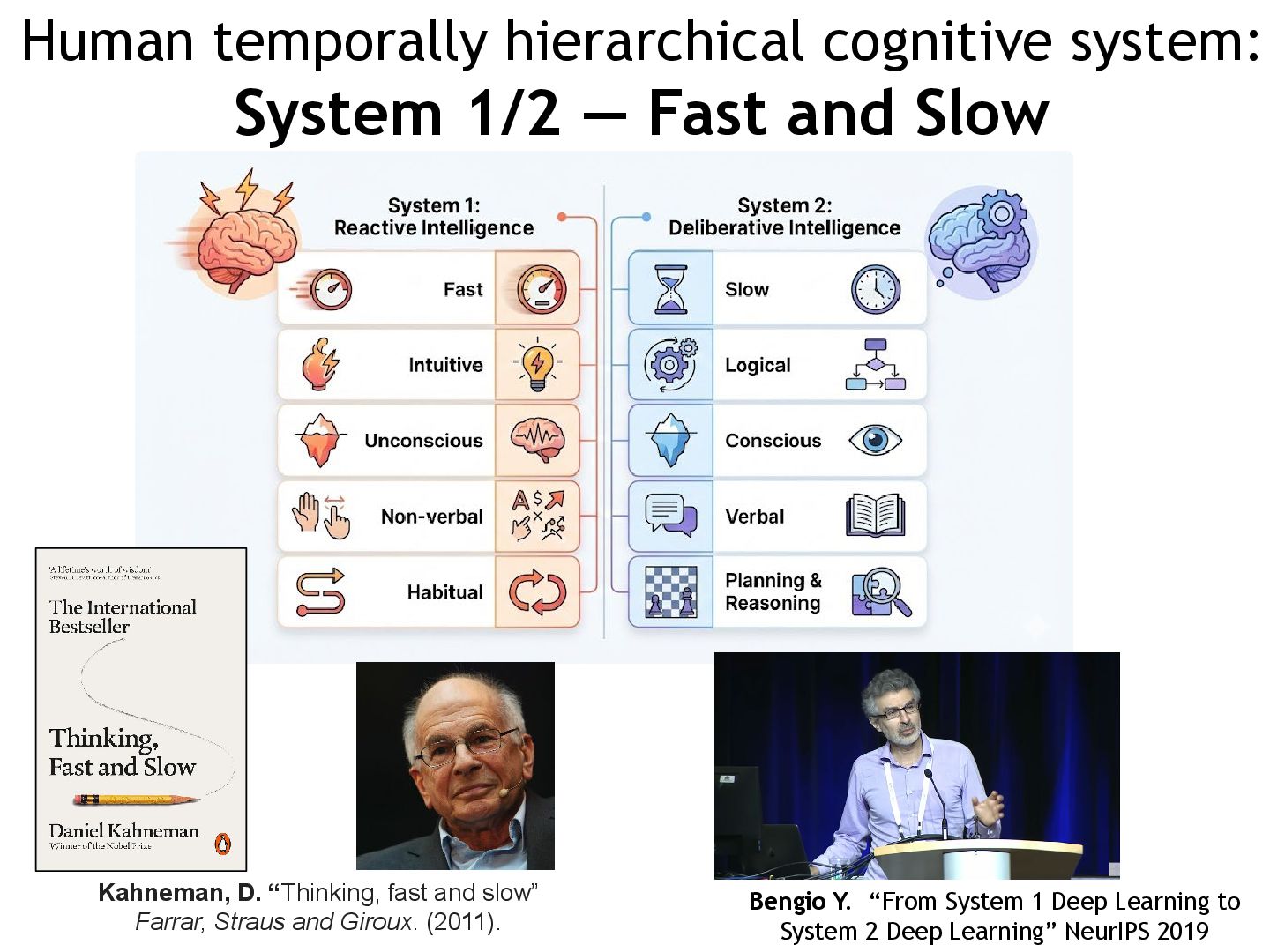
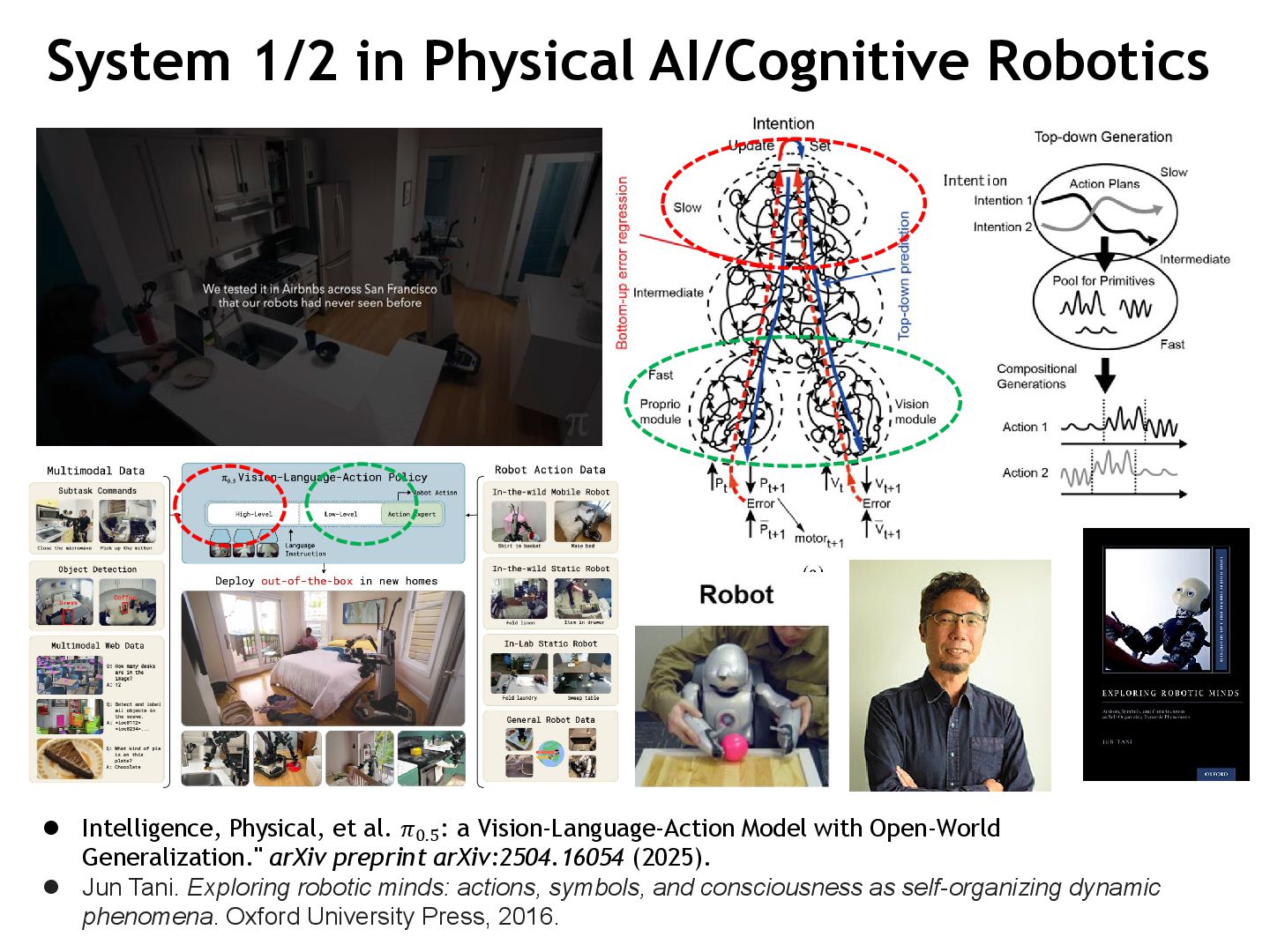
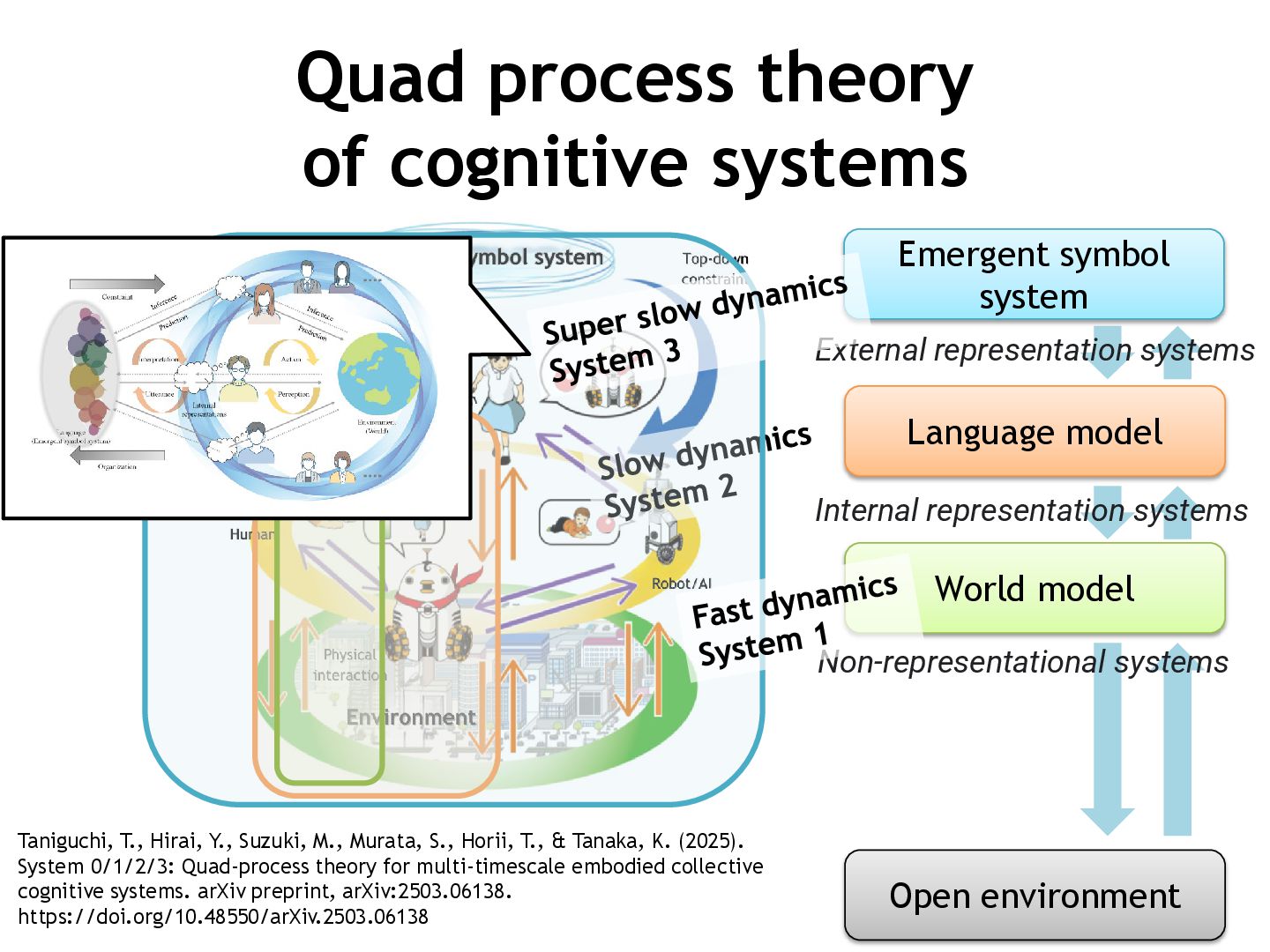
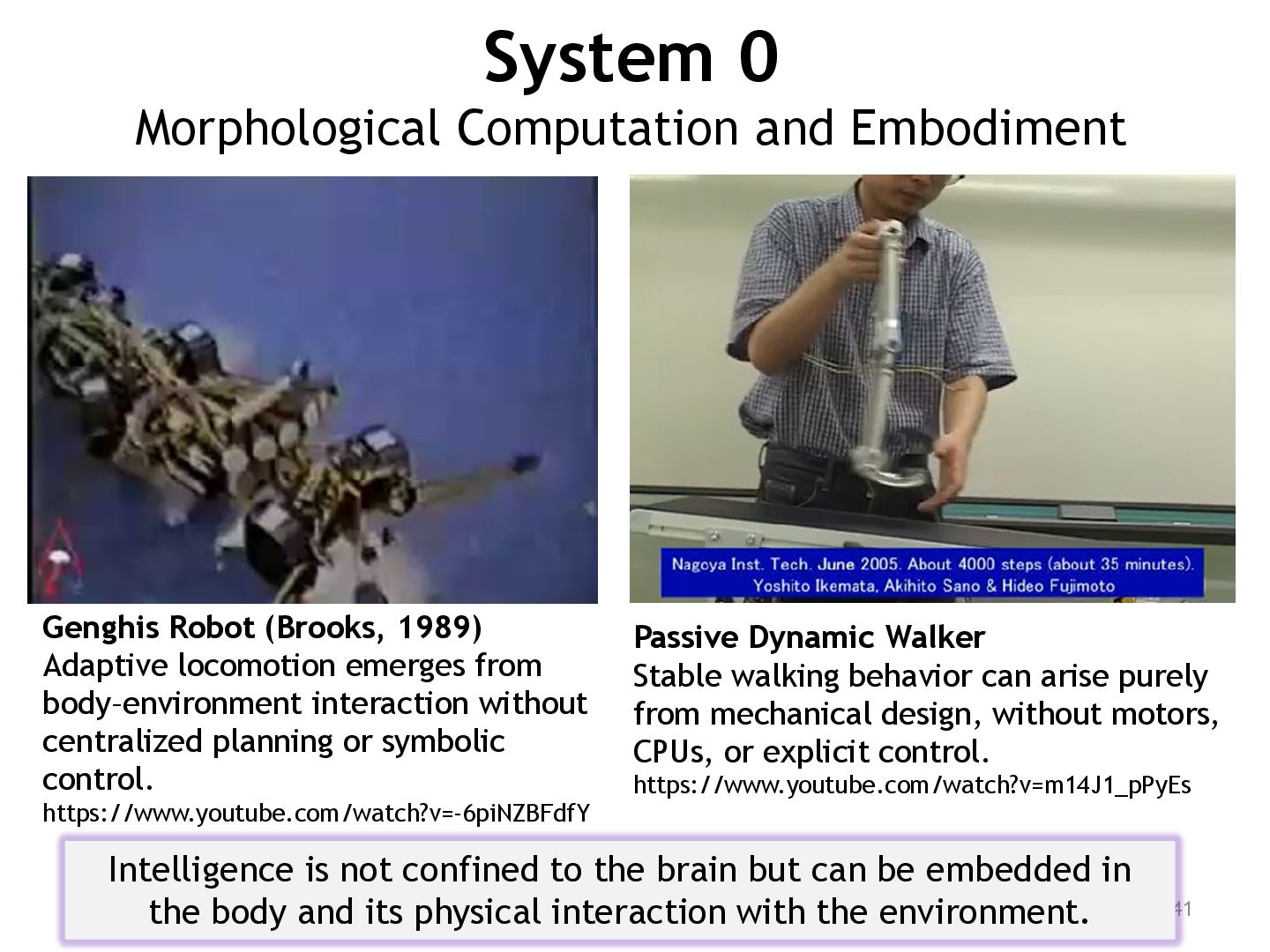
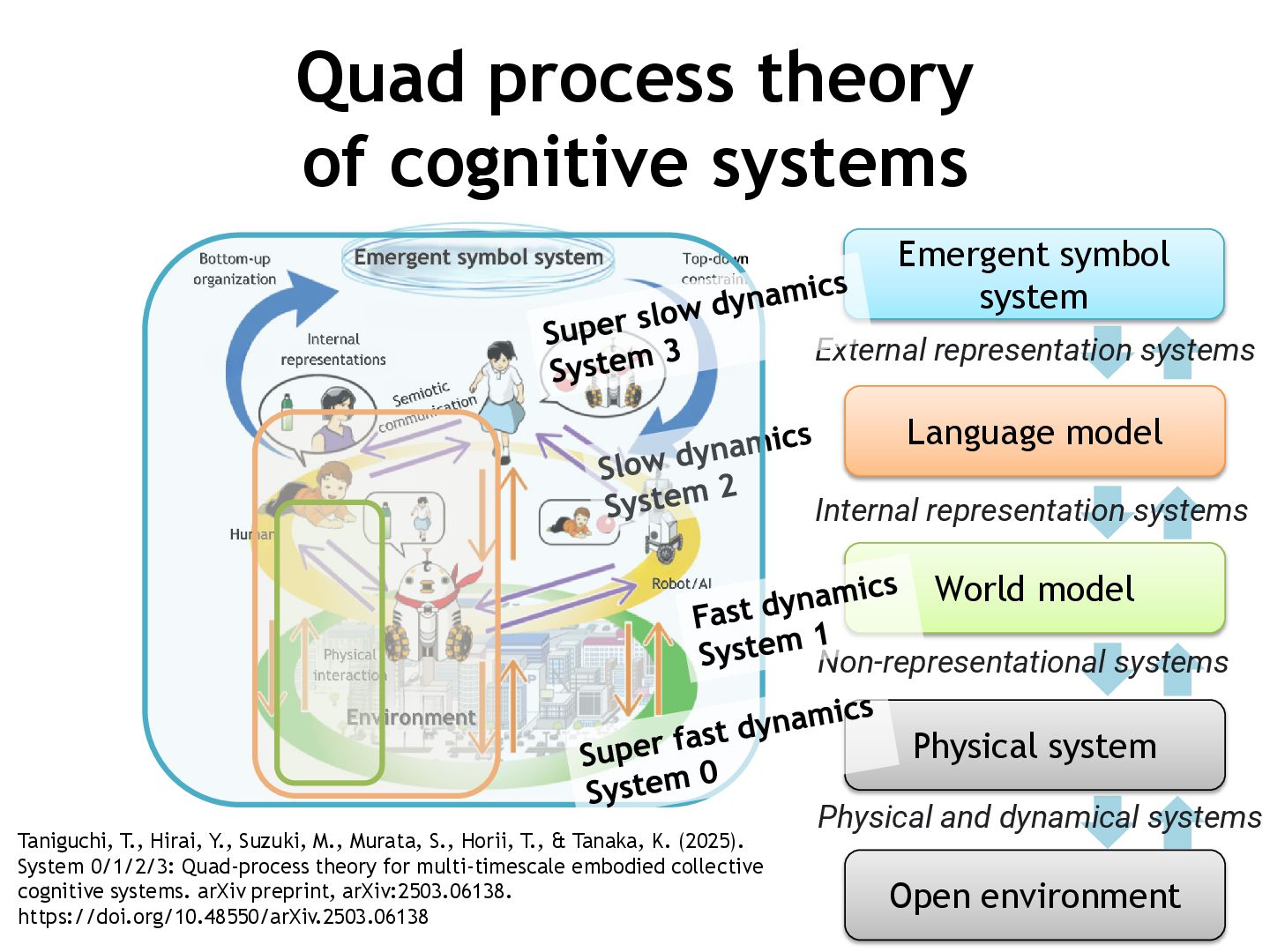
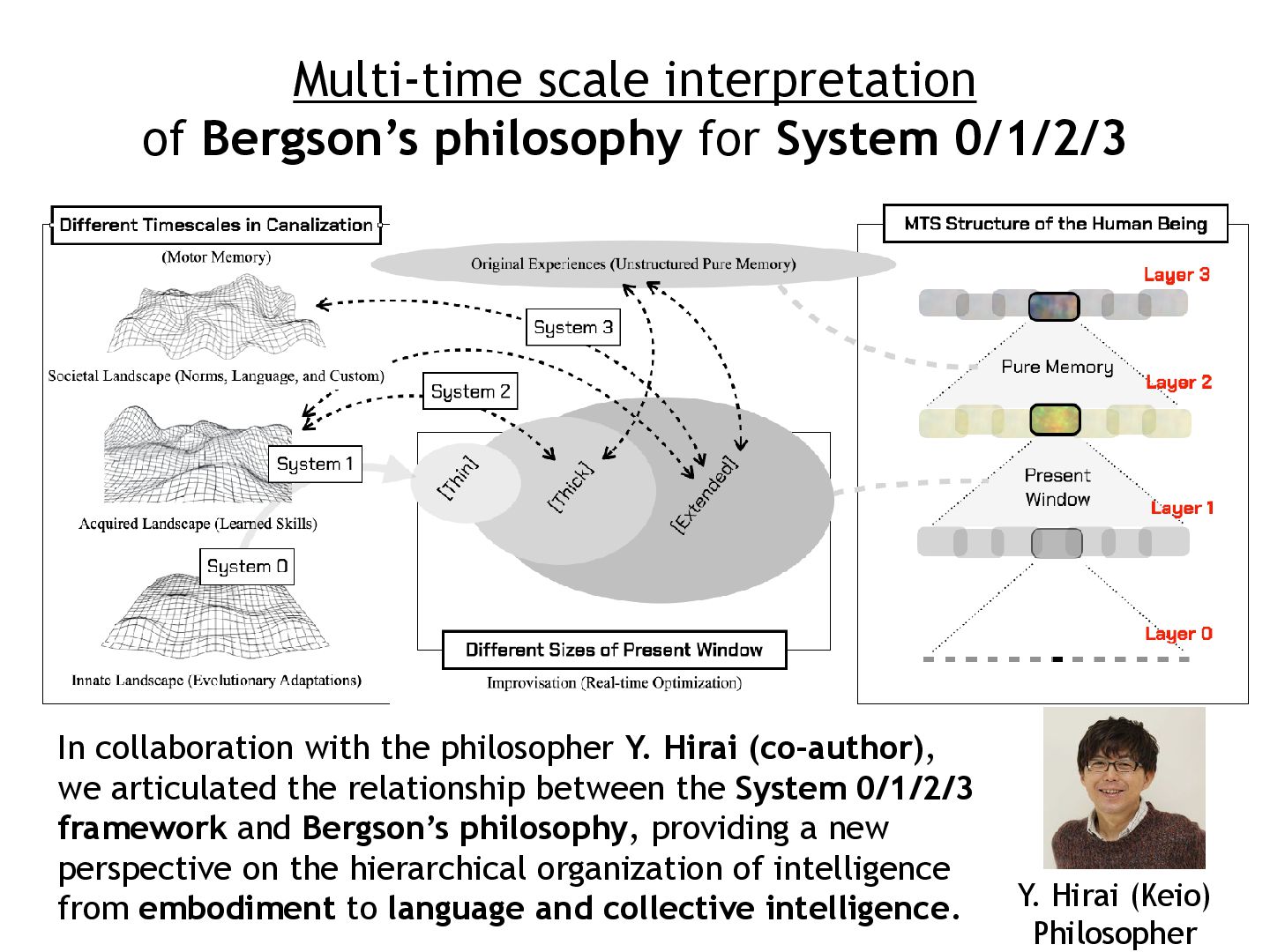
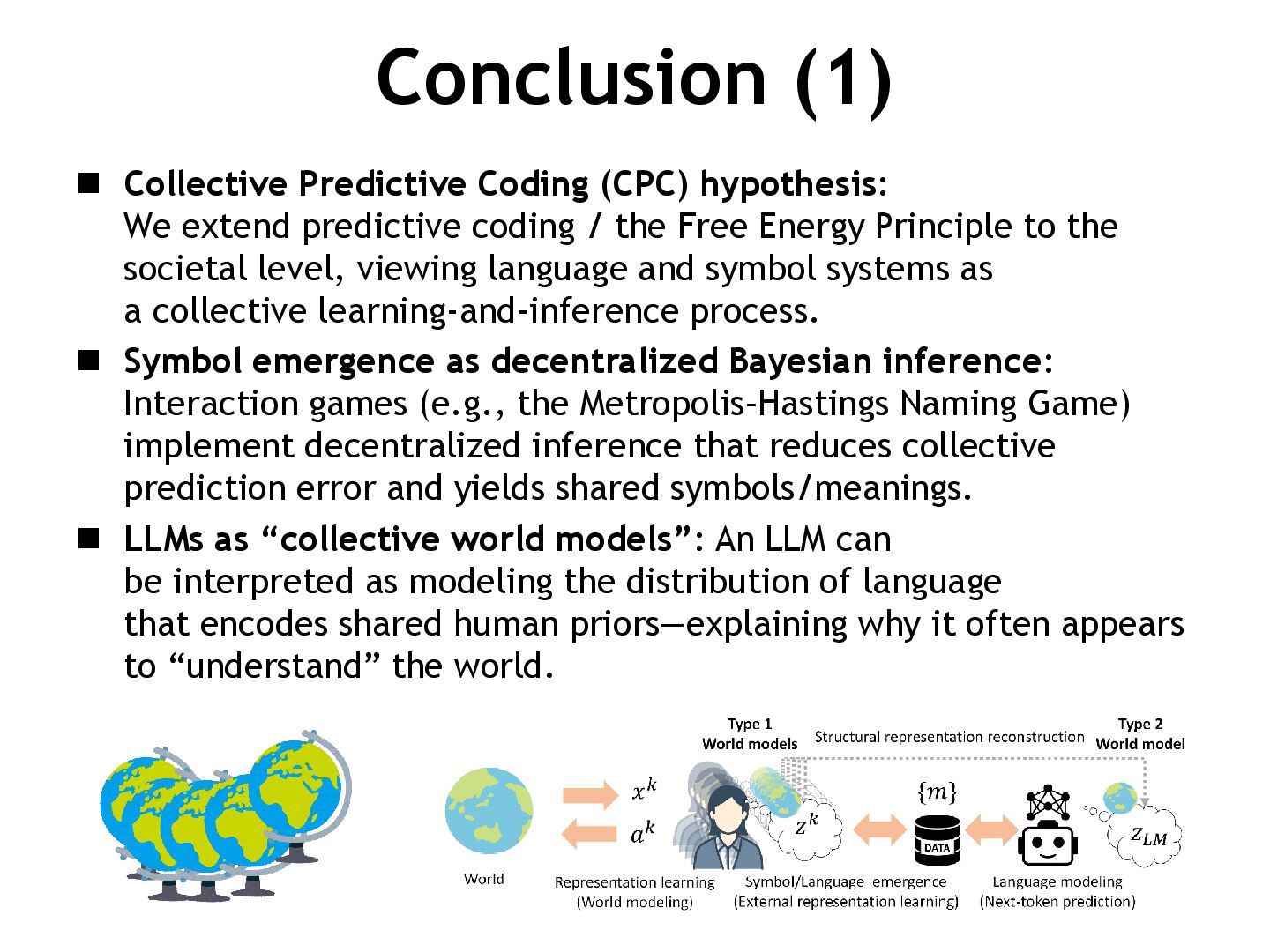
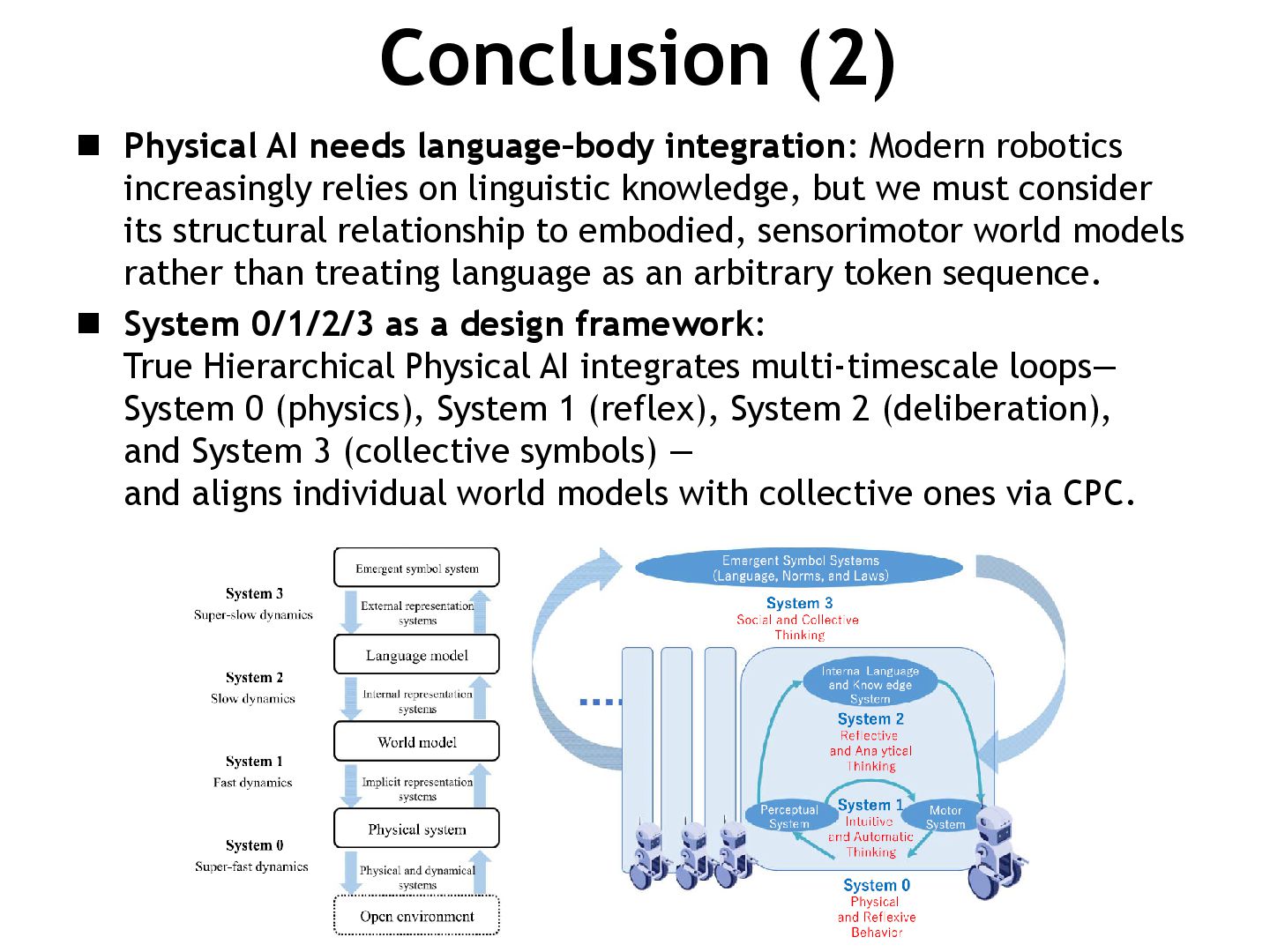
Abstract: In this talk, I introduced the "System 0/1/2/3" architecture, a novel cognitive framework for Physical AI that extends the traditional dual-process theory. By integrating embodiment-based pre-cognitive adaptation (System 0) and collective intelligence (System 3) with individual cognitive loops (System 1/2), we can bridge the gap between physical dynamics and social symbol systems. I also discussed the "Collective Predictive Coding (CPC)" hypothesis, interpreting Large Language Models (LLMs) as collective world models.
Key Topics:
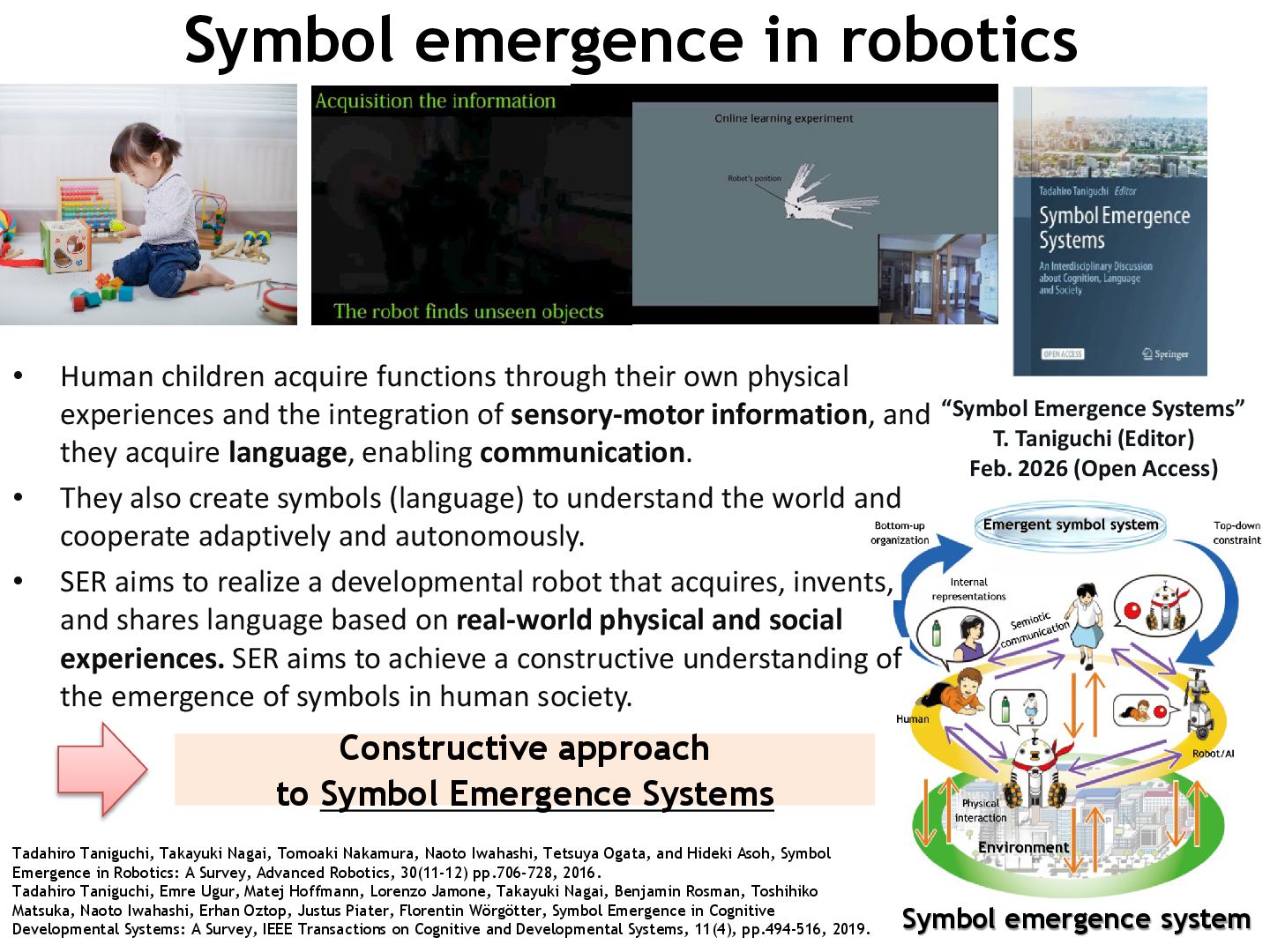
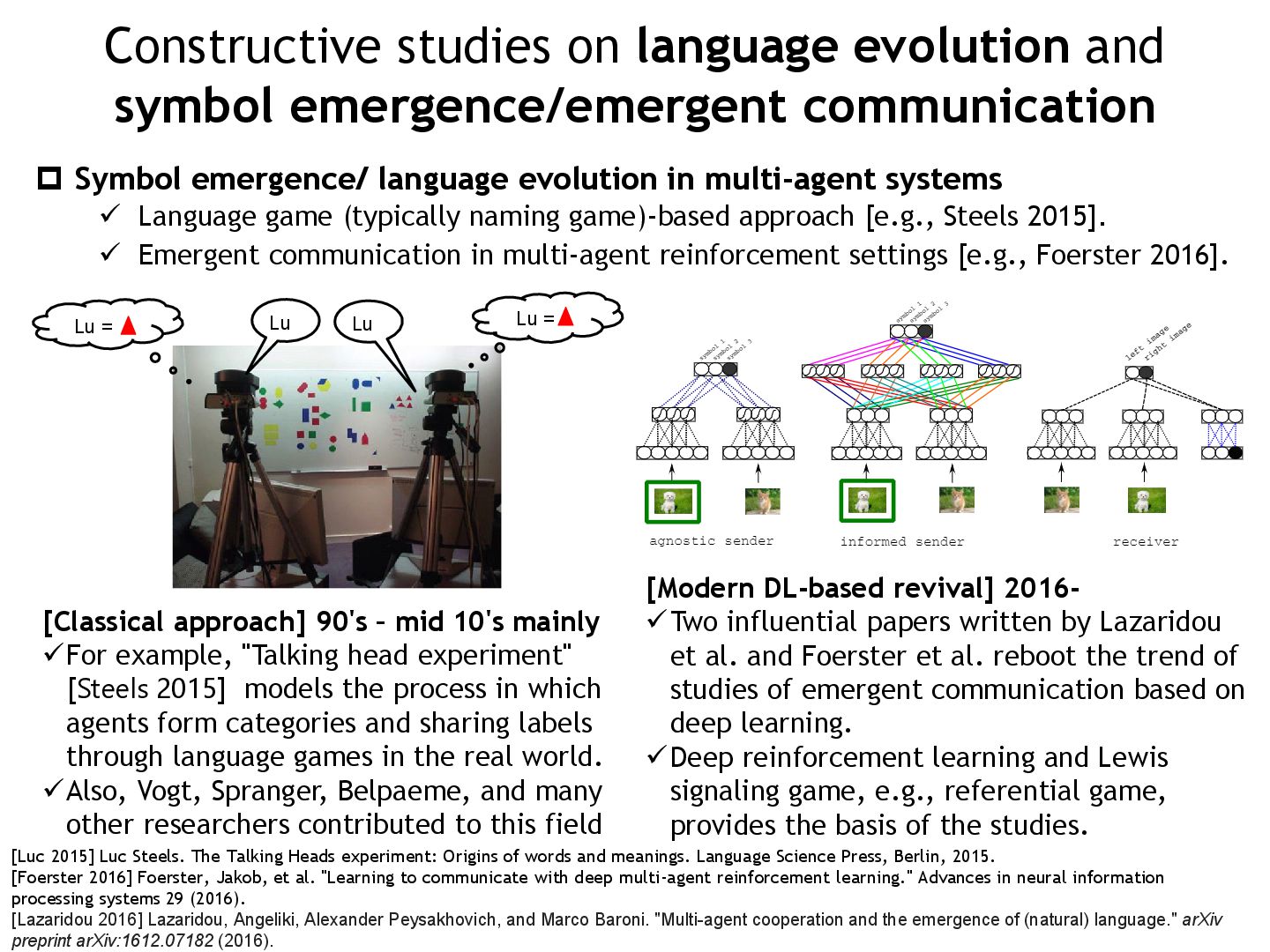
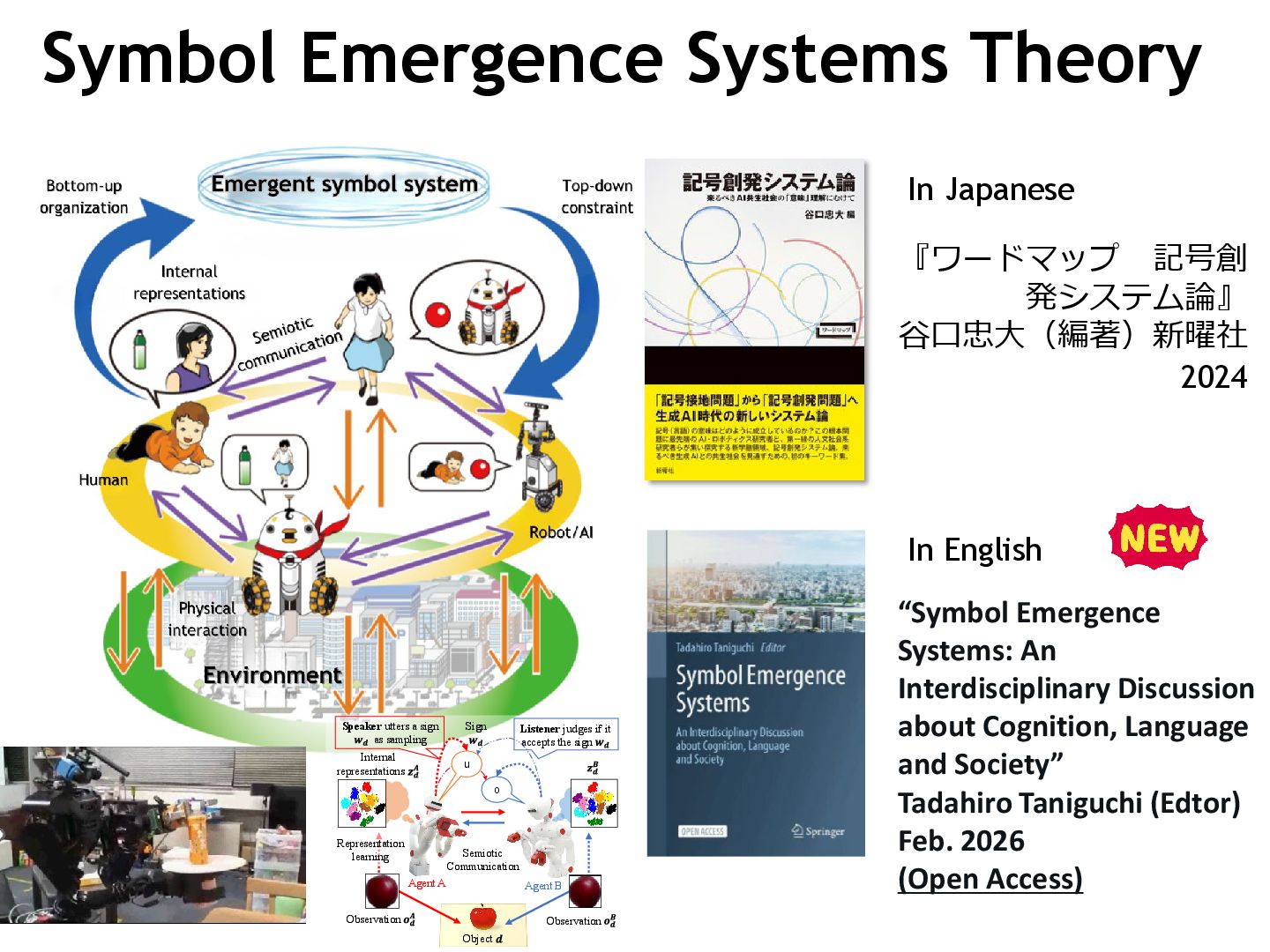
- Symbol Emergence in Robotics
- System 0/1/2/3 Quad-process Theory
- Collective Predictive Coding (CPC) & LLMs
- Physical AI & Morphological Computation
References:
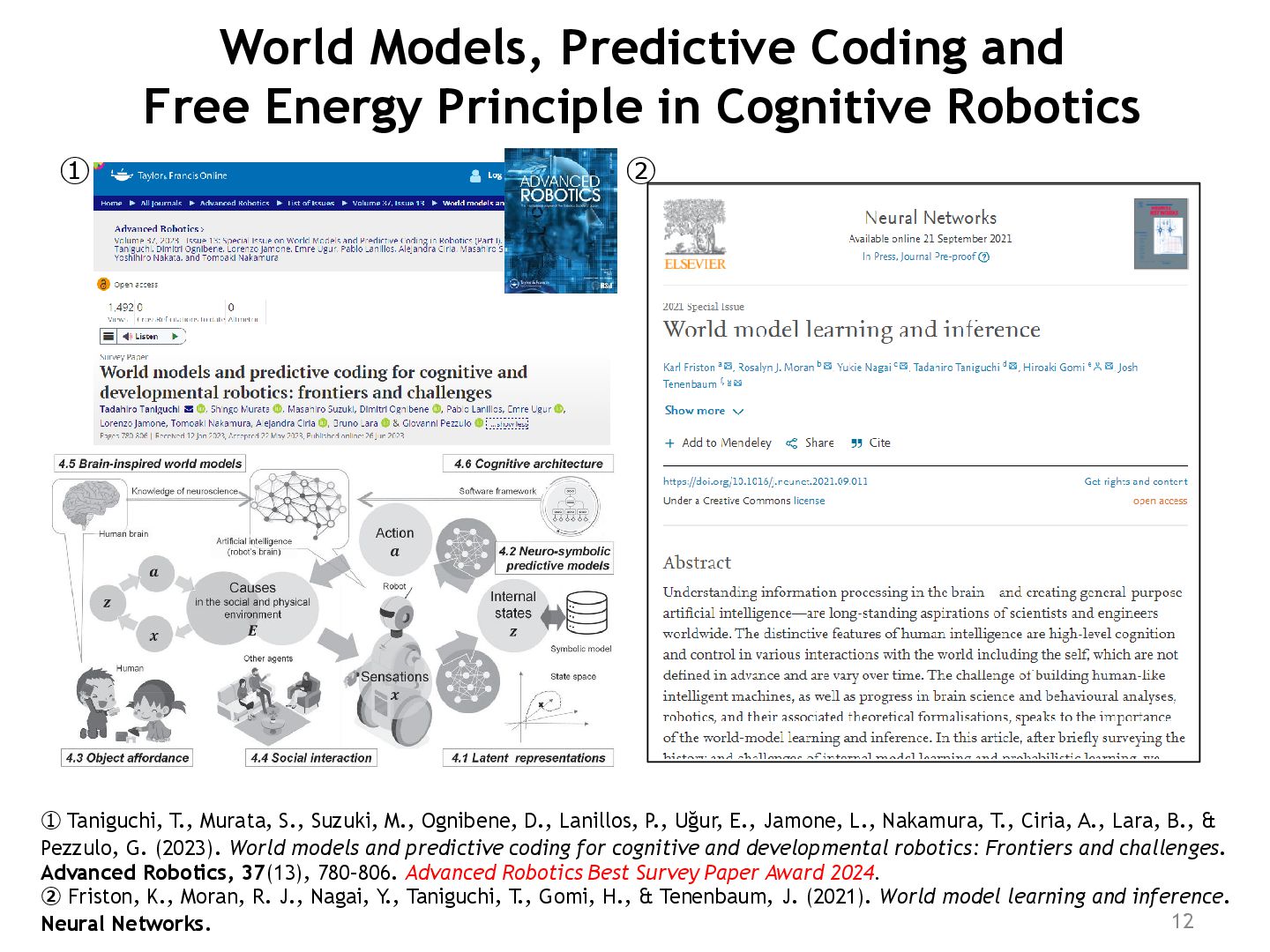
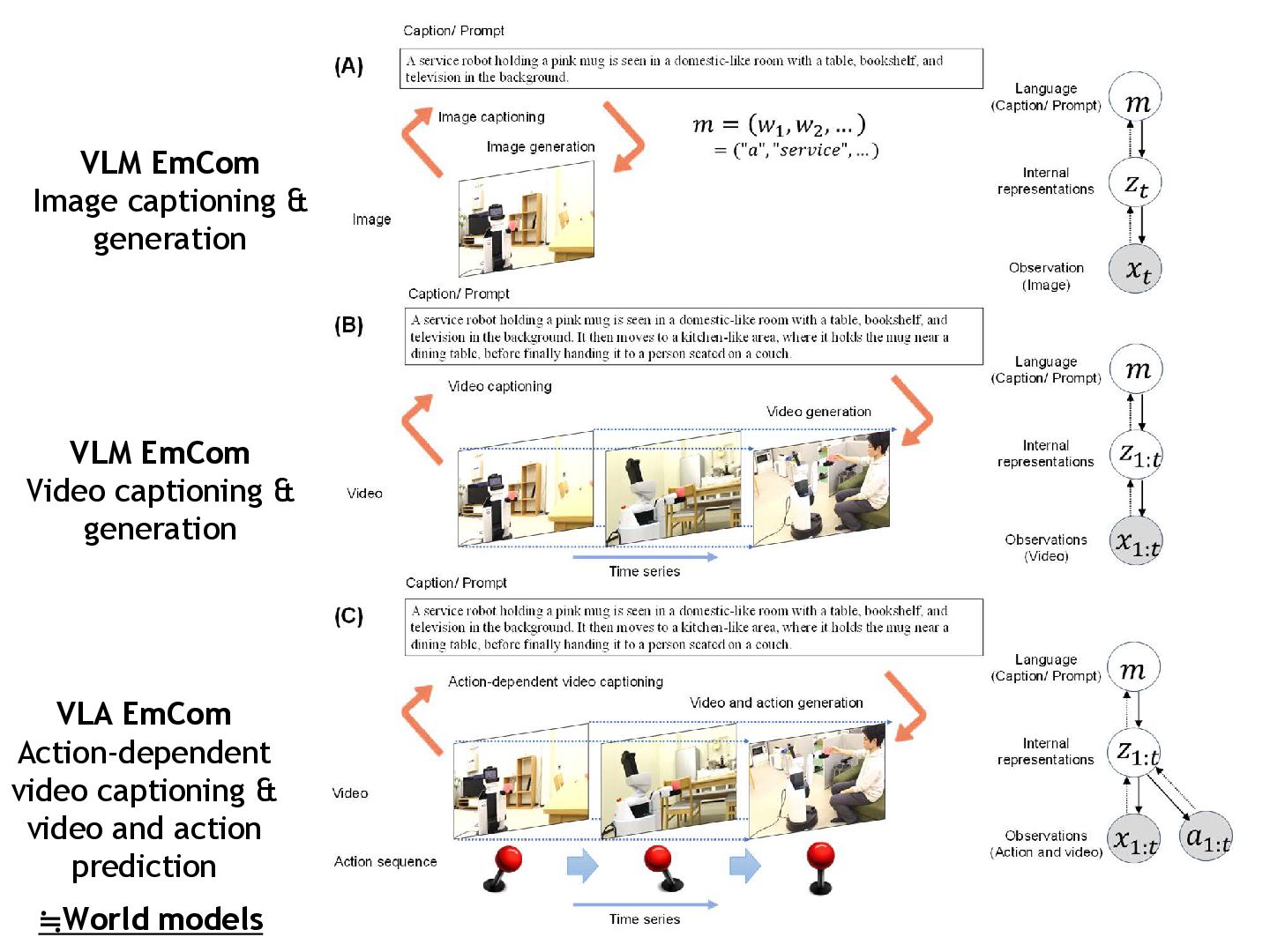
Taniguchi, T., Murata, S., Suzuki, M., Ognibene, D., Lanillos, P., Uğur, E., Jamone, L., Nakamura, T., Ciria, A., Lara, B., & Pezzulo, G. (2023). World models and predictive coding for cognitive and developmental robotics: Frontiers and challenges. Advanced Robotics, 37(13), 780–806. Advanced Robotics Best Survey Paper Award 2024.
https://www.tandfonline.com/doi/full/10.1080/01691864.2023.2225232
Friston, K., Moran, R. J., Nagai, Y., Taniguchi, T., Gomi, H., & Tenenbaum, J. (2021). World model learning and inference. Neural Networks.
https://www.sciencedirect.com/science/article/pii/S0893608021003610
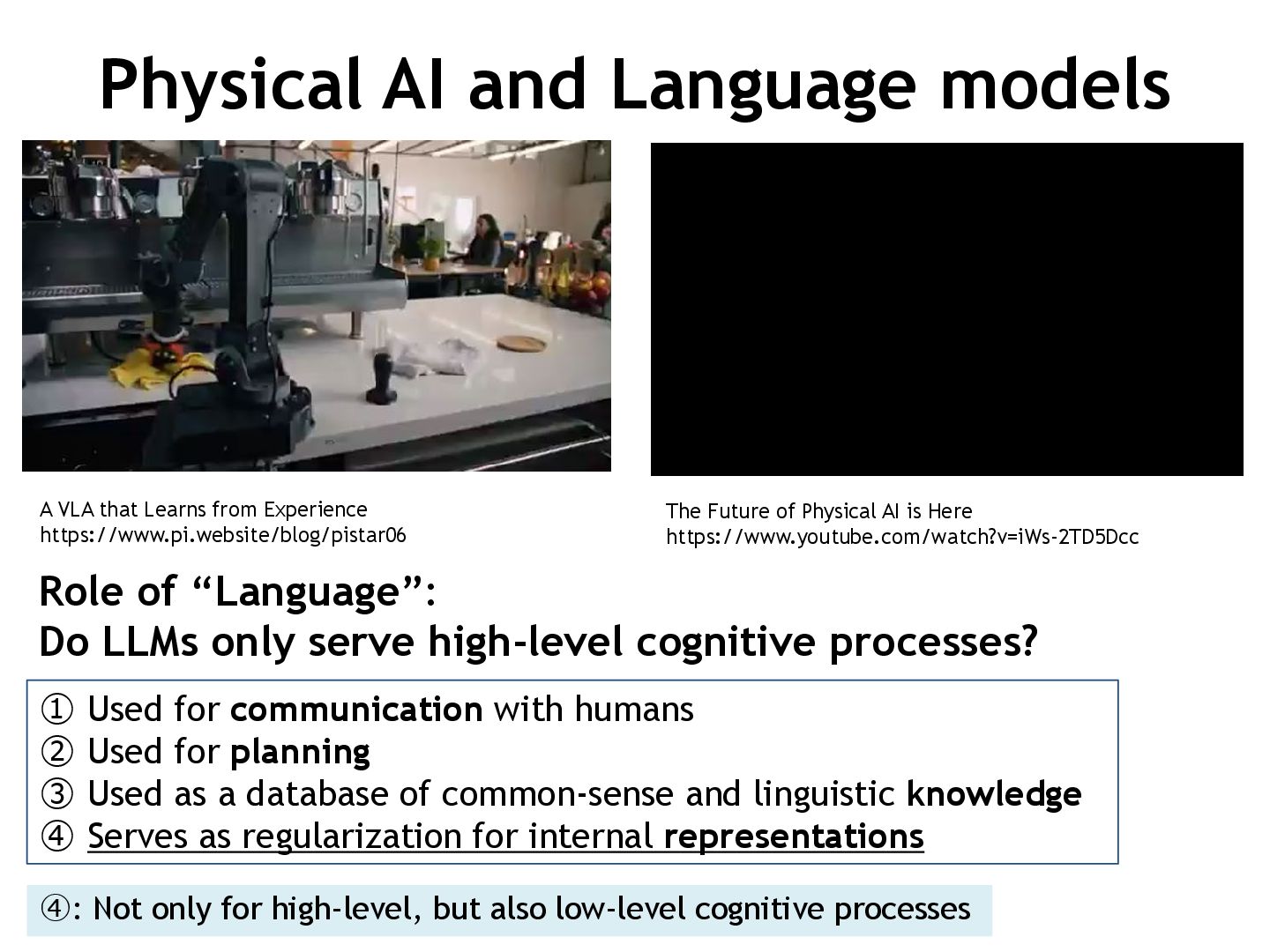
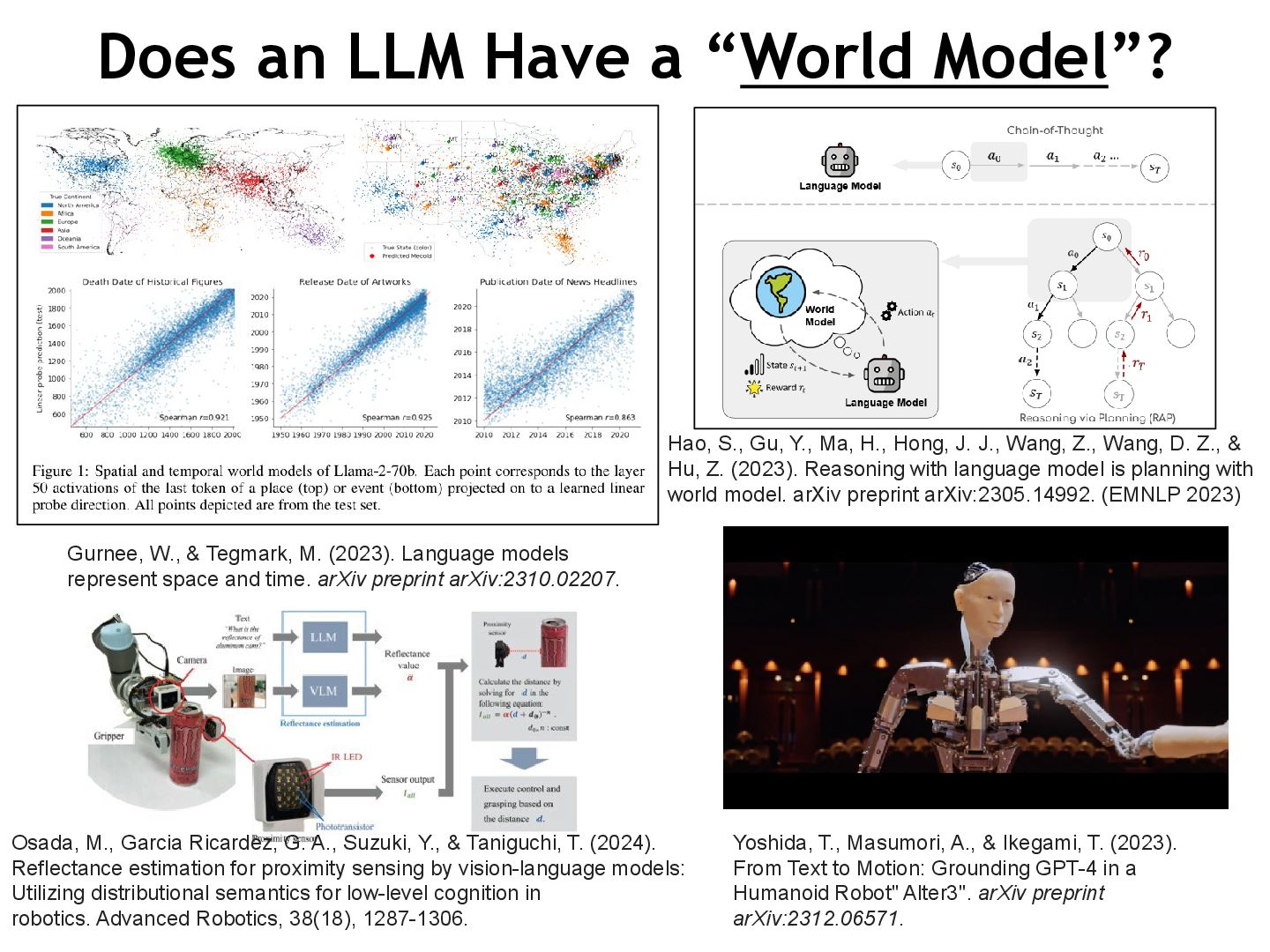
Osada, M., Garcia Ricardez, G. A., Suzuki, Y., & Taniguchi, T. (2024). Reflectance estimation for proximity sensing by vision-language models: Utilizing distributional semantics for low-level cognition in robotics. Advanced Robotics, 38(18), 1287-1306.
https://www.tandfonline.com/doi/full/10.1080/01691864.2024.2393408
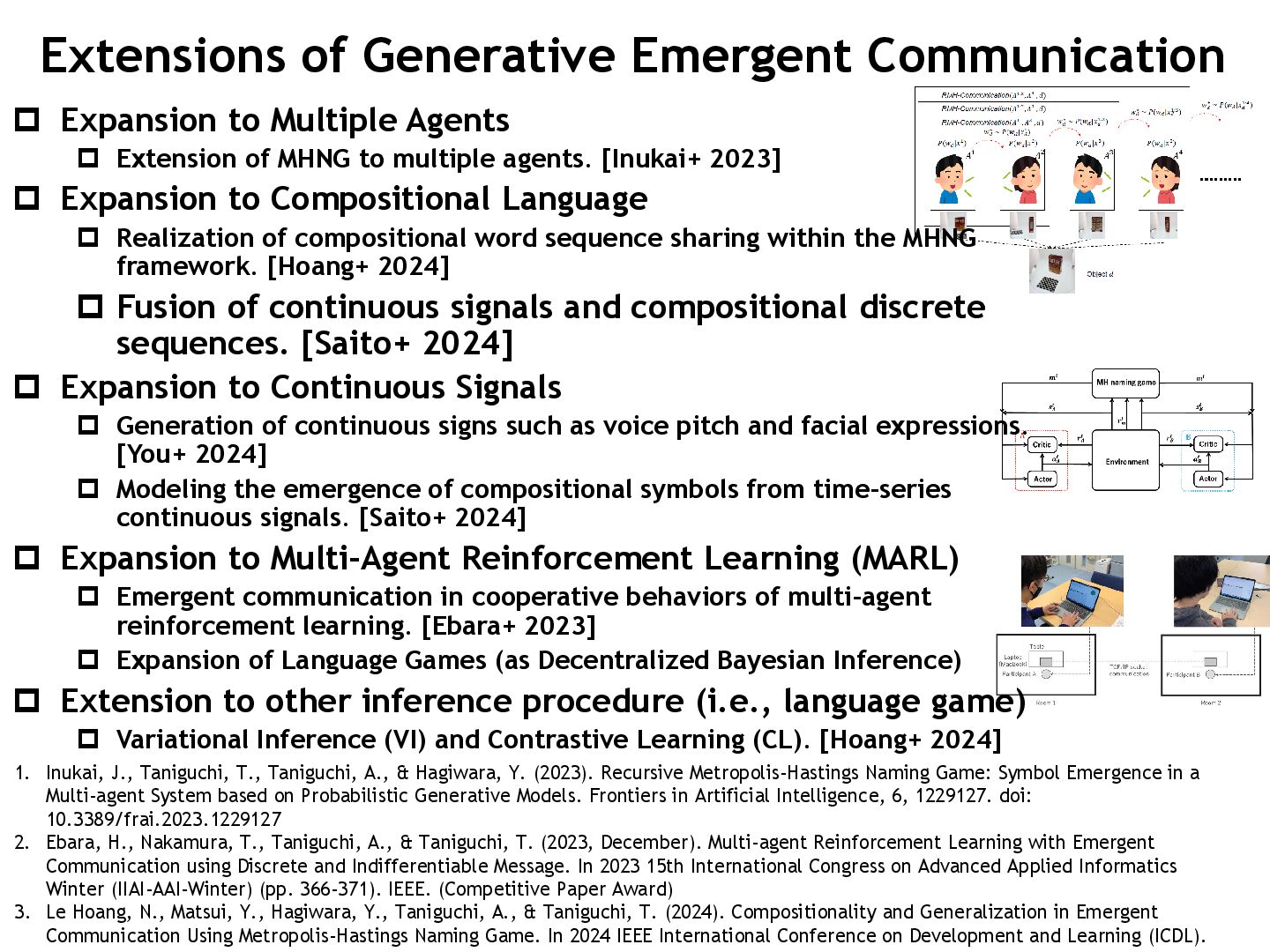
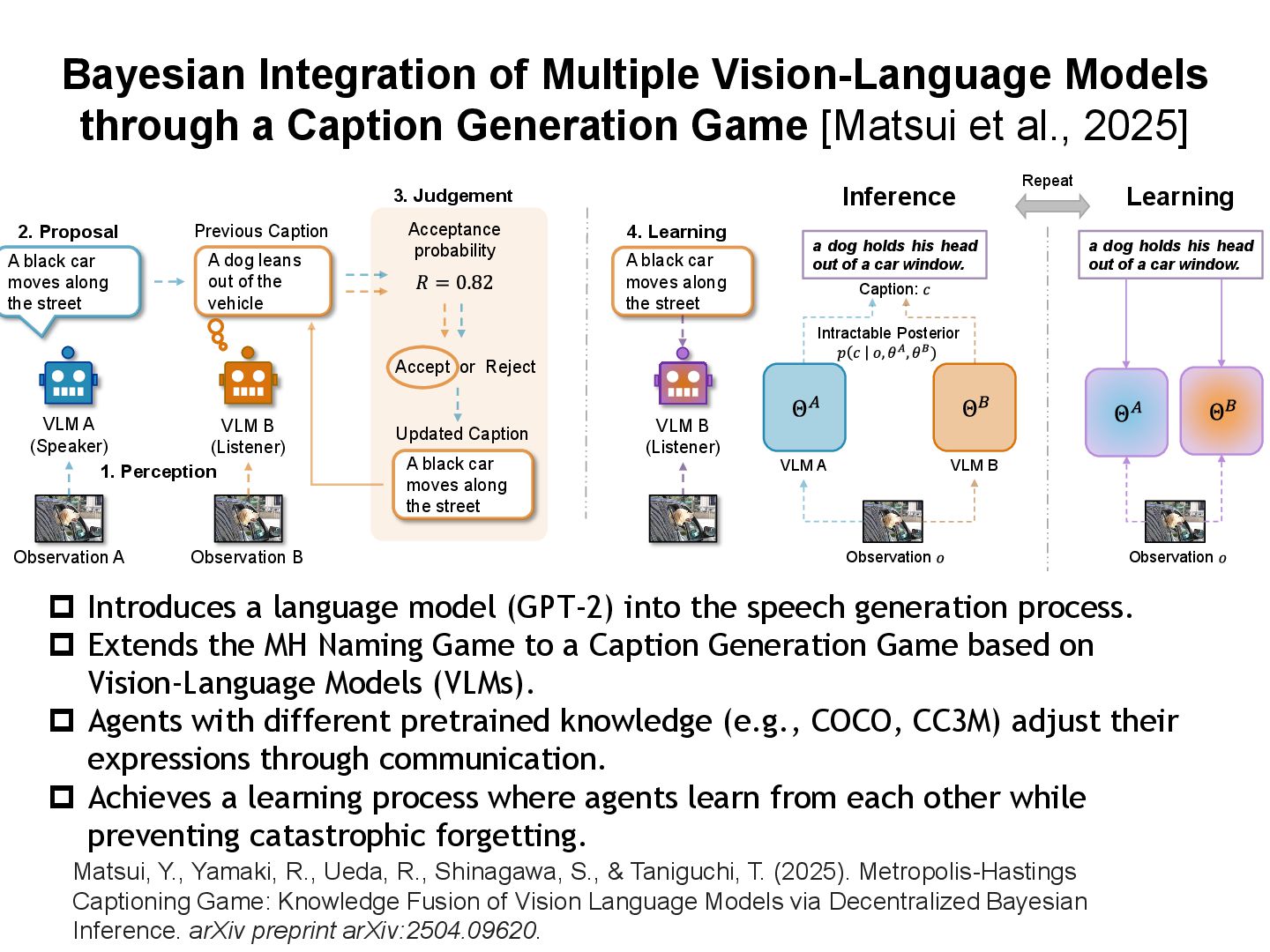
Taniguchi, T., Ueda, R., Nakamura, T., Suzuki, M., & Taniguchi, A. (2024). Generative Emergent Communication: Large Language Model is a Collective World Model. arXiv preprint arXiv:2501.00226.
https://arxiv.org/abs/2501.00226
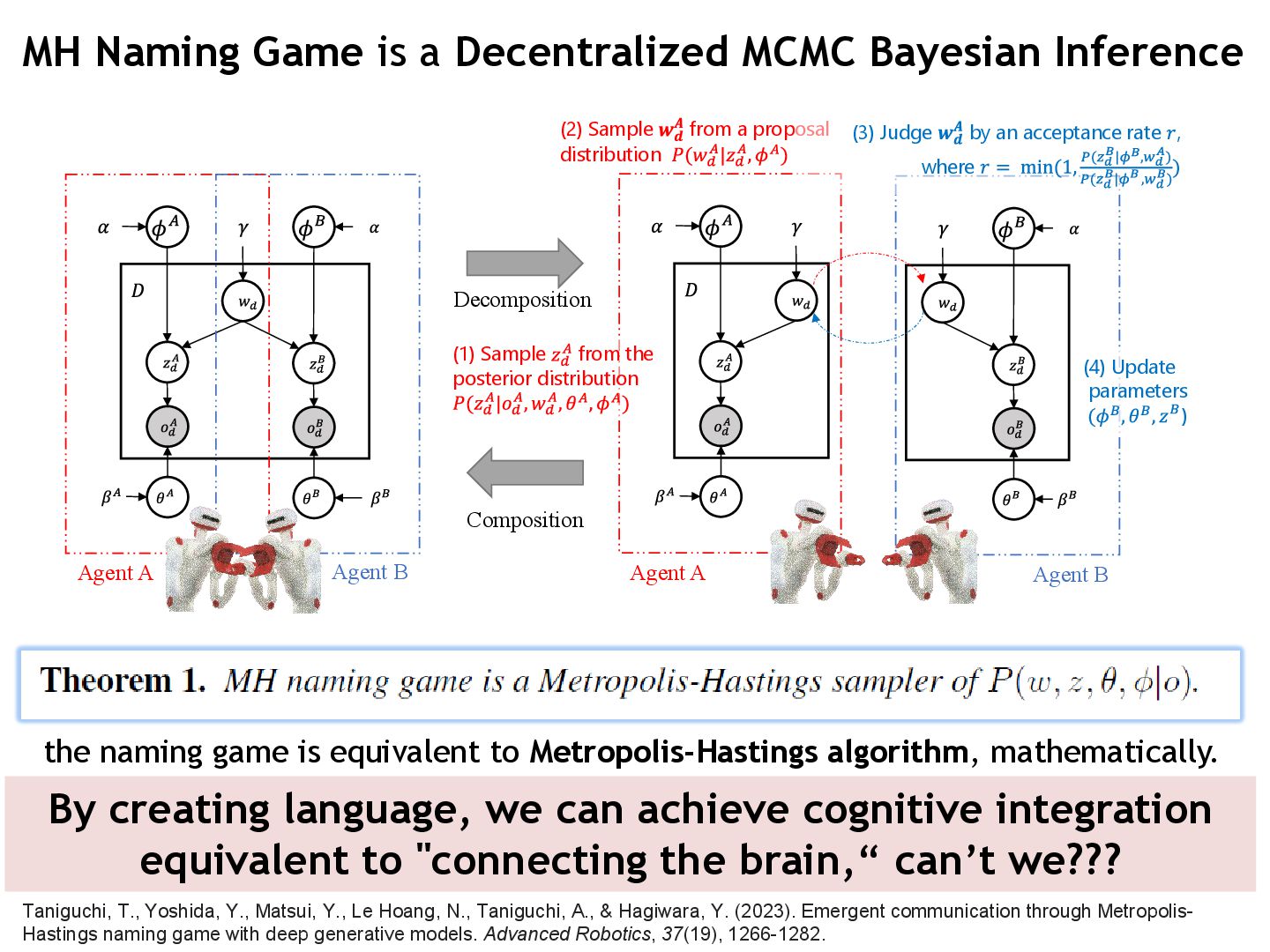
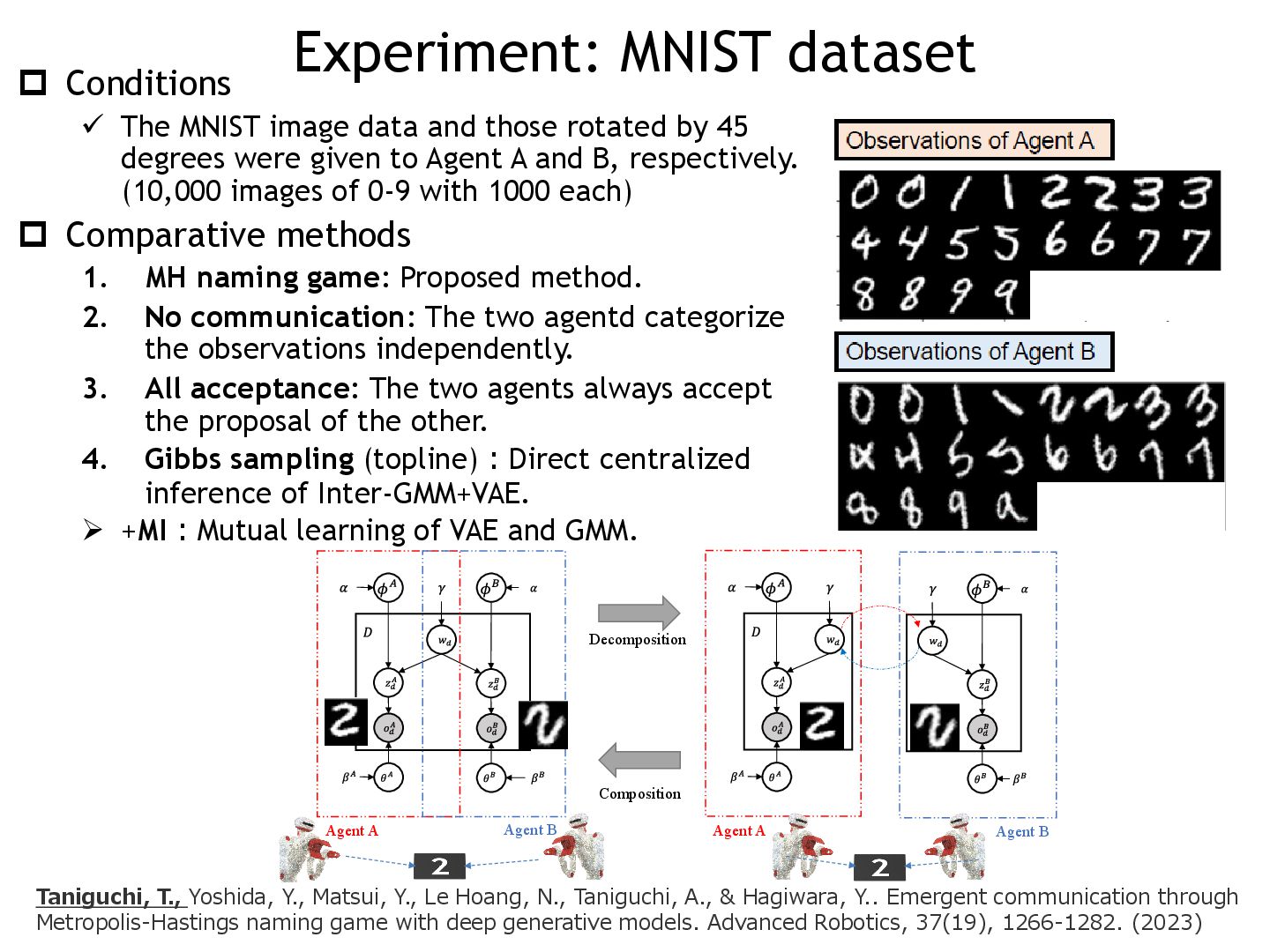
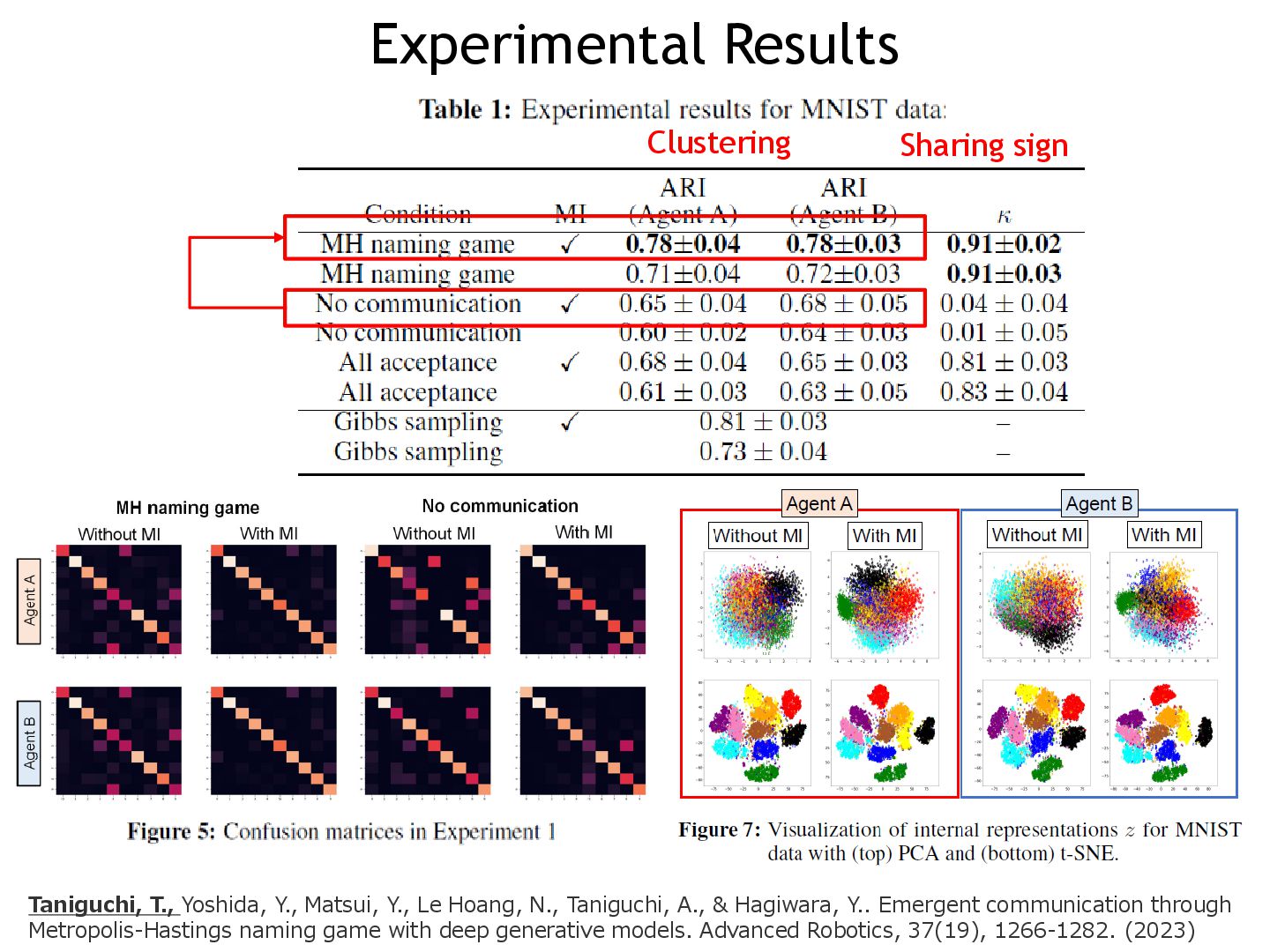
Taniguchi, T., Yoshida, Y., Matsui, Y., Le Hoang, N., Taniguchi, A., & Hagiwara, Y.. Emergent communication through Metropolis-Hastings naming game with deep generative models. Advanced Robotics, 37(19), 1266-1282. (2023)
https://www.tandfonline.com/doi/full/10.1080/01691864.2023.2260856
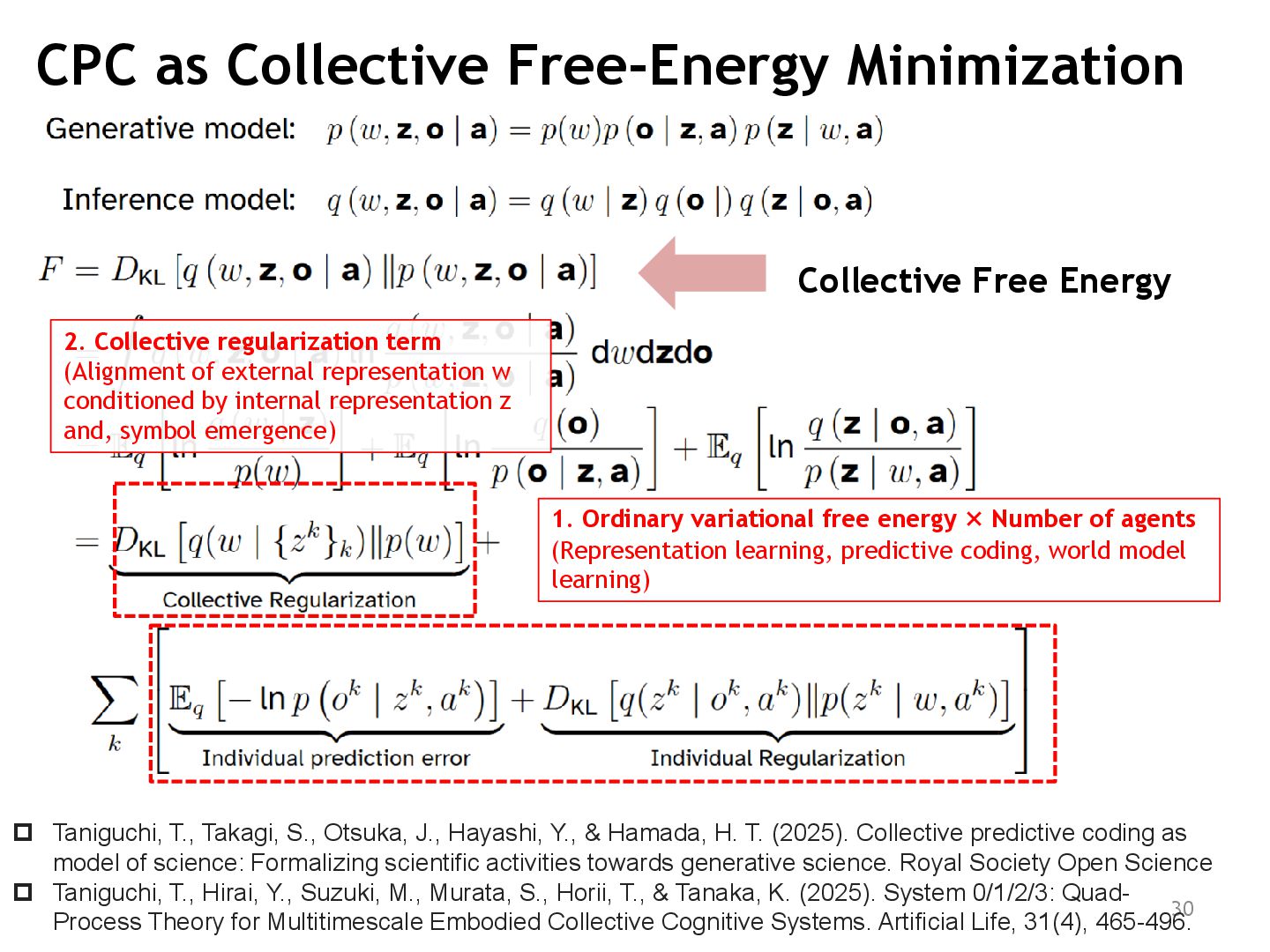
Taniguchi, Tadahiro. "Collective predictive coding hypothesis: Symbol emergence as decentralized Bayesian inference." Frontiers in Robotics and AI 11 (2024): 1353870. (Outstanding article award)
https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2024.1353870/full
Taniguchi, T., Takagi, S., Otsuka, J., Hayashi, Y., & Hamada, H. T. (2025). Collective predictive coding as model of science: Formalizing scientific activities towards generative science. Royal Society Open Science
https://royalsocietypublishing.org/rsos/article/12/6/241678/235366/Collective-predictive-coding-as-model-of-science
Taniguchi, T., Hirai, Y., Suzuki, M., Murata, S., Horii, T., & Tanaka, K. (2025). System 0/1/2/3: Quad-Process Theory for Multitimescale Embodied Collective Cognitive Systems. Artificial Life, 31(4), 465-496.
https://direct.mit.edu/artl/article-abstract/31/4/465/134613/System-0-1-2-3-Quad-Process-Theory-for?redirectedFrom=fulltext
https://arxiv.org/abs/2503.06138
Yoshida, N., & Taniguchi, T. (2025, November). Reward-Independent Messaging for Decentralized Multi-Agent Reinforcement Learning. In International Conference on Neural Information Processing (pp. 367-382). Best Paper Award Runner-Up at ICONIP 2025
https://dl.acm.org/doi/10.1007/978-981-95-4367-0_25
https://arxiv.org/abs/2505.21985
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Two Types of “World Models” [Type 1] World(/Umwelt) Model:](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Symbol emergence systems [Taniguchi+ 2016] Tadahiro Taniguchi, Takayuki Nagai, Tomoaki](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_14.jpg){kind=link}
![Symbol emergence systems [Taniguchi+ 2016] Tadahiro Taniguchi, Takayuki Nagai, Tomoaki](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_15.jpg){kind=link}
{kind=link}
![Metropolis-Hastings naming game [Taniguchi+ 2023] Outline 1. Perception: Speaker and](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Collective Predictive Coding Hypothesis [Taniguchi ‘24] Language is formed](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Reward-Independent Messaging for Decentralized Multi-Agent Reinforcement Learning [Yoshida+ 2025] We](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![System 0/1/2/3: Quad-process theory [Taniguchi+ 2025] We propose a System](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_42.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Information Email: [email protected] X (personal): @tanichu We are hiring!!](https://files.speakerdeck.com/presentations/0831da38952d4e488950663c589e8706/slide_49.jpg){kind=link}