T. Ohkawa, R. Furuta, and Y. Sato.
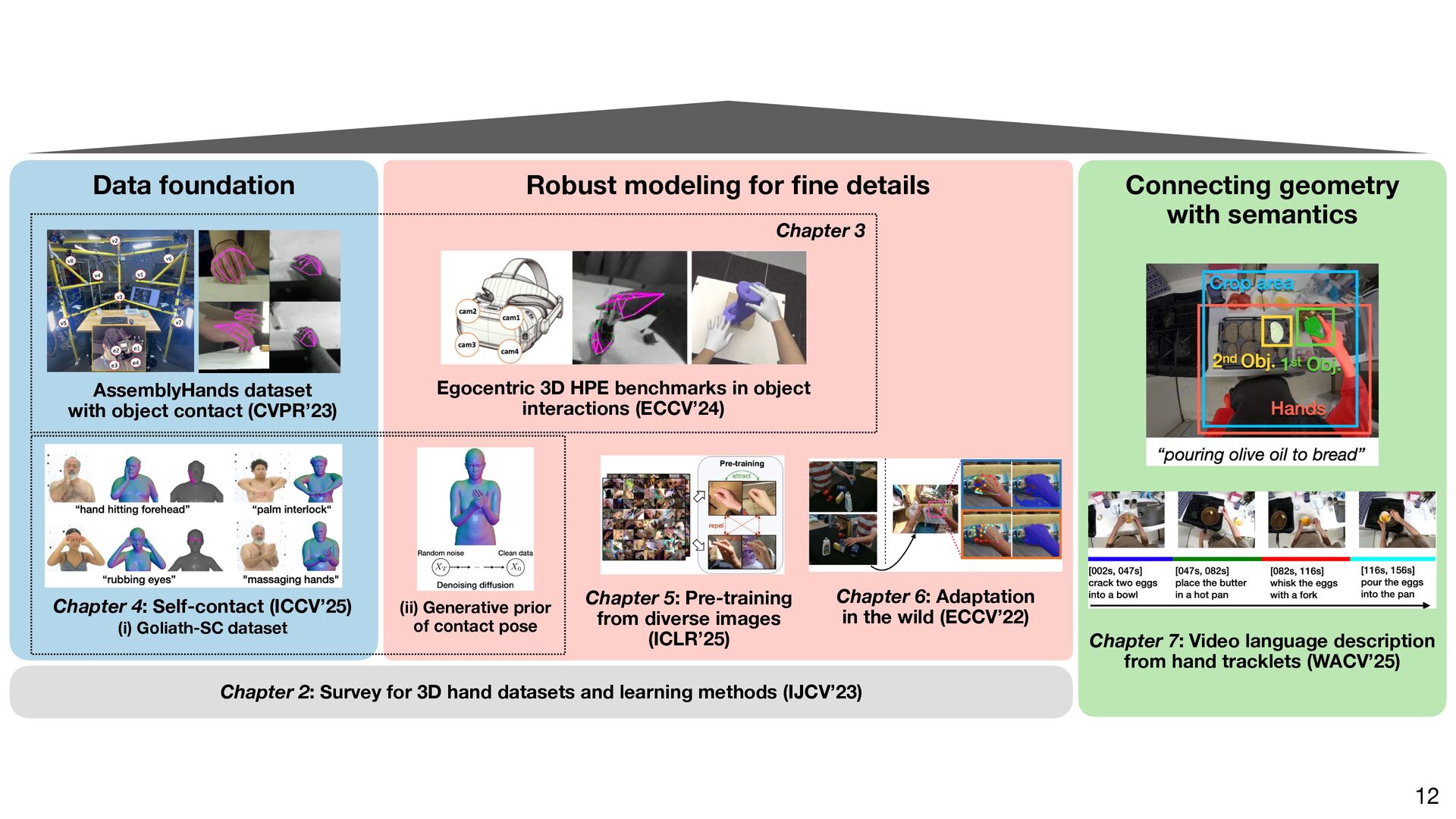
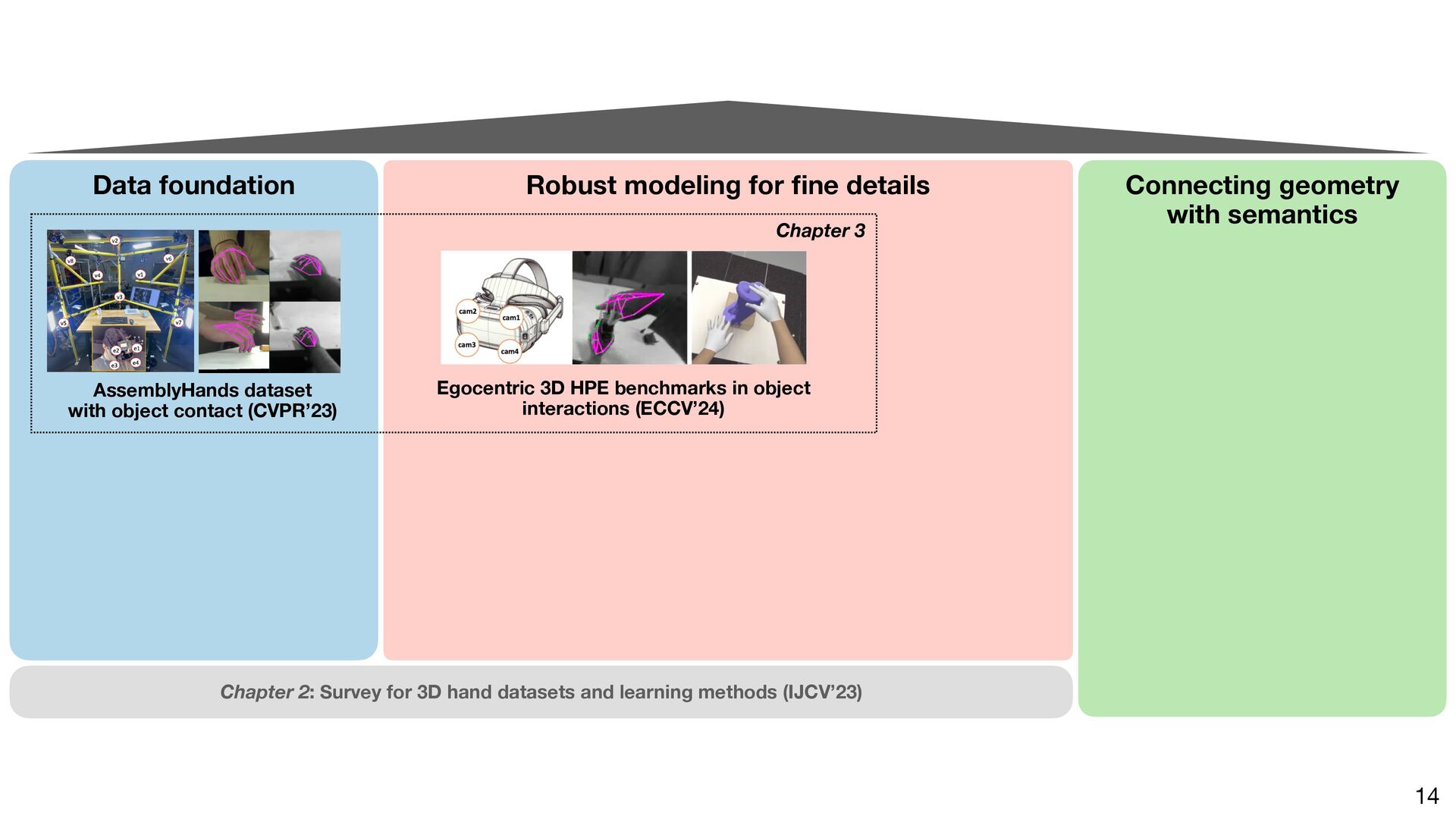
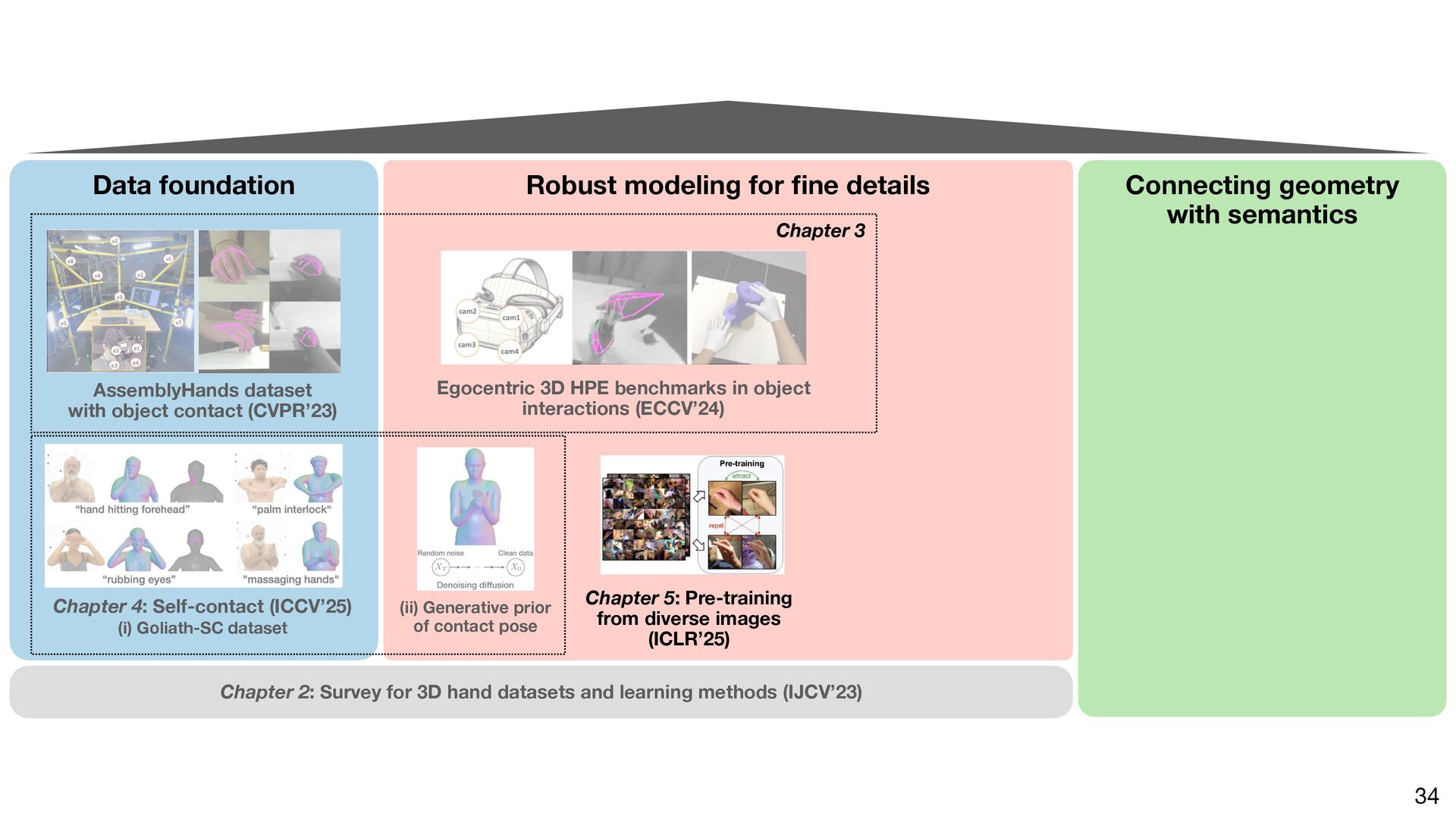
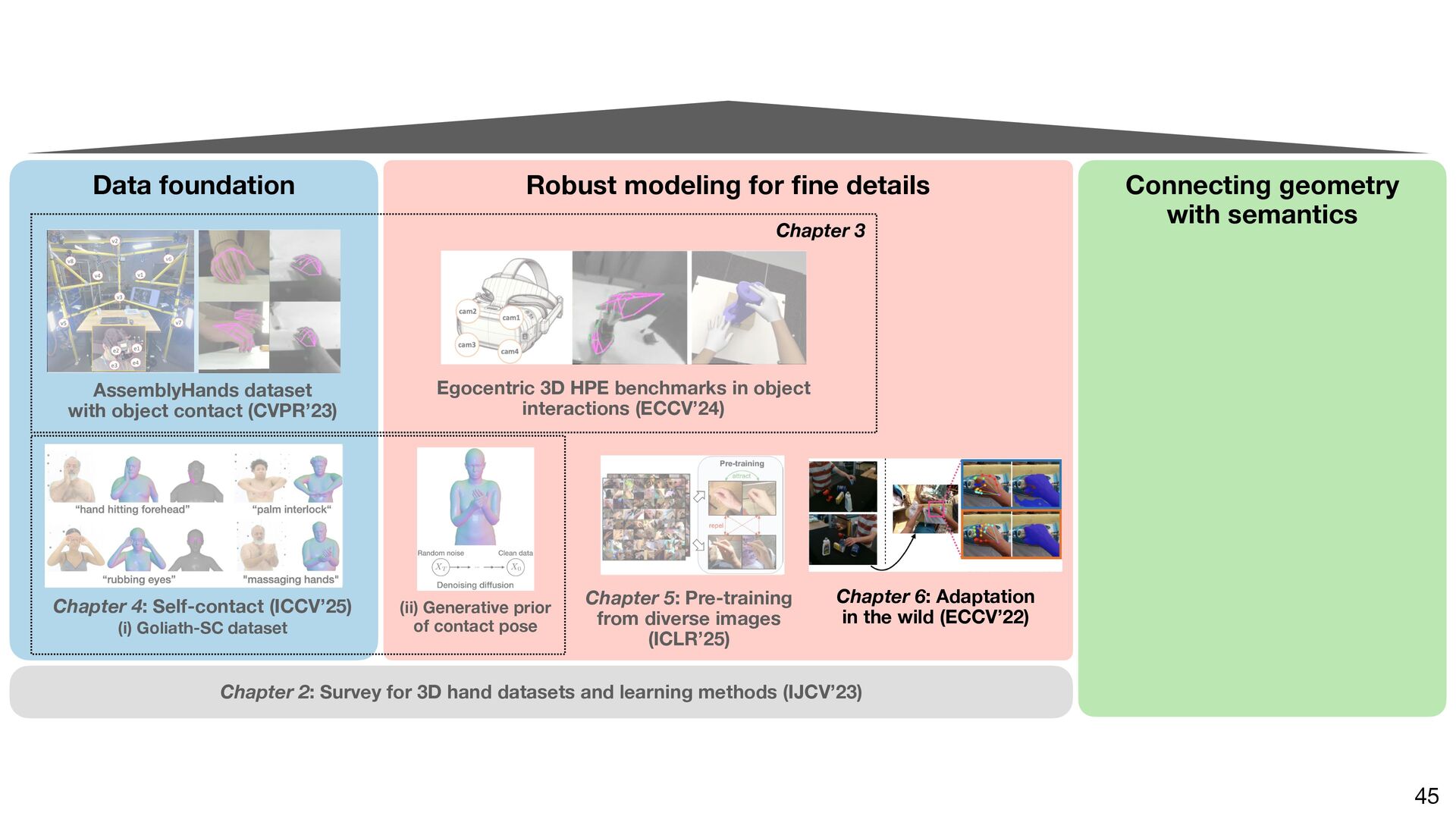
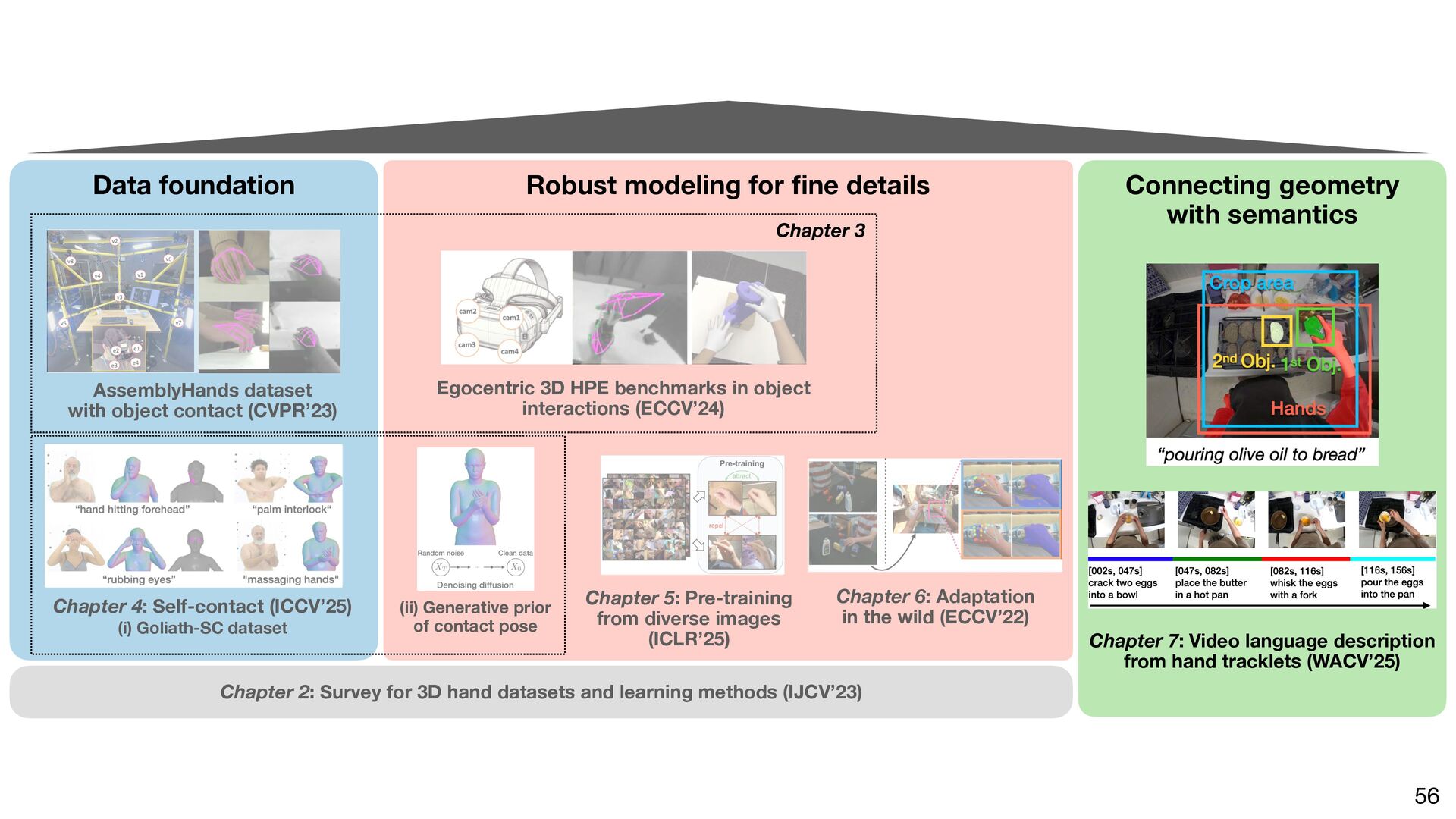
E ffi cient annotation and learning for 3D hand pose estimation: A survey. IJCV, 2023 2. Z. Fan*, T. Ohkawa*, L. Yang*, ... (20 authors), A. Yao.
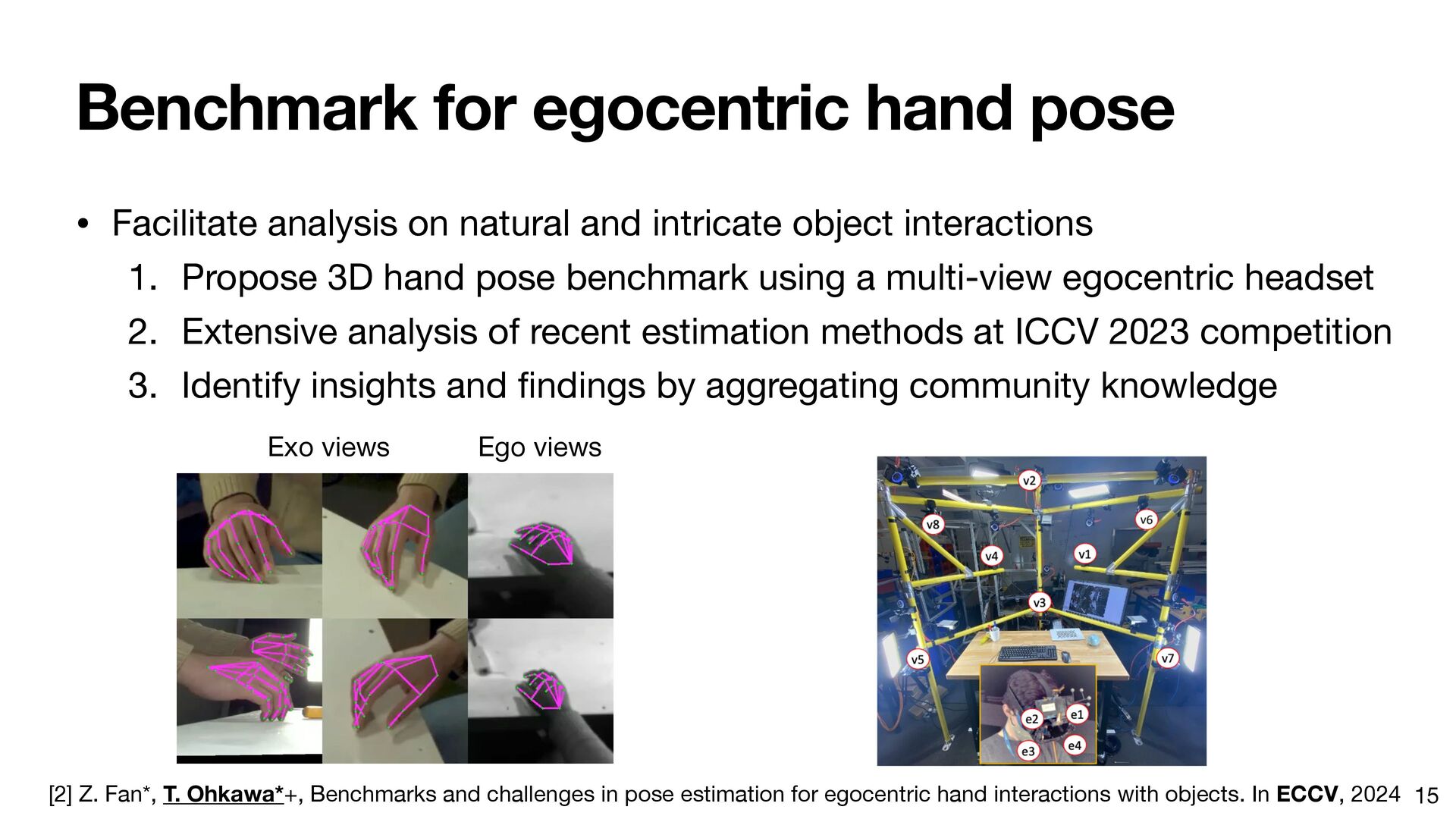
Benchmarks and challenges in pose estimation for egocentric hand interactions with objects. In ECCV, 2024 3. T. Ohkawa, J. Lee, S. Saito, J. Saragih, F. Prada, Y. Xu, S. Yu, R. Furuta, Y. Sato, and T. Shiratori.
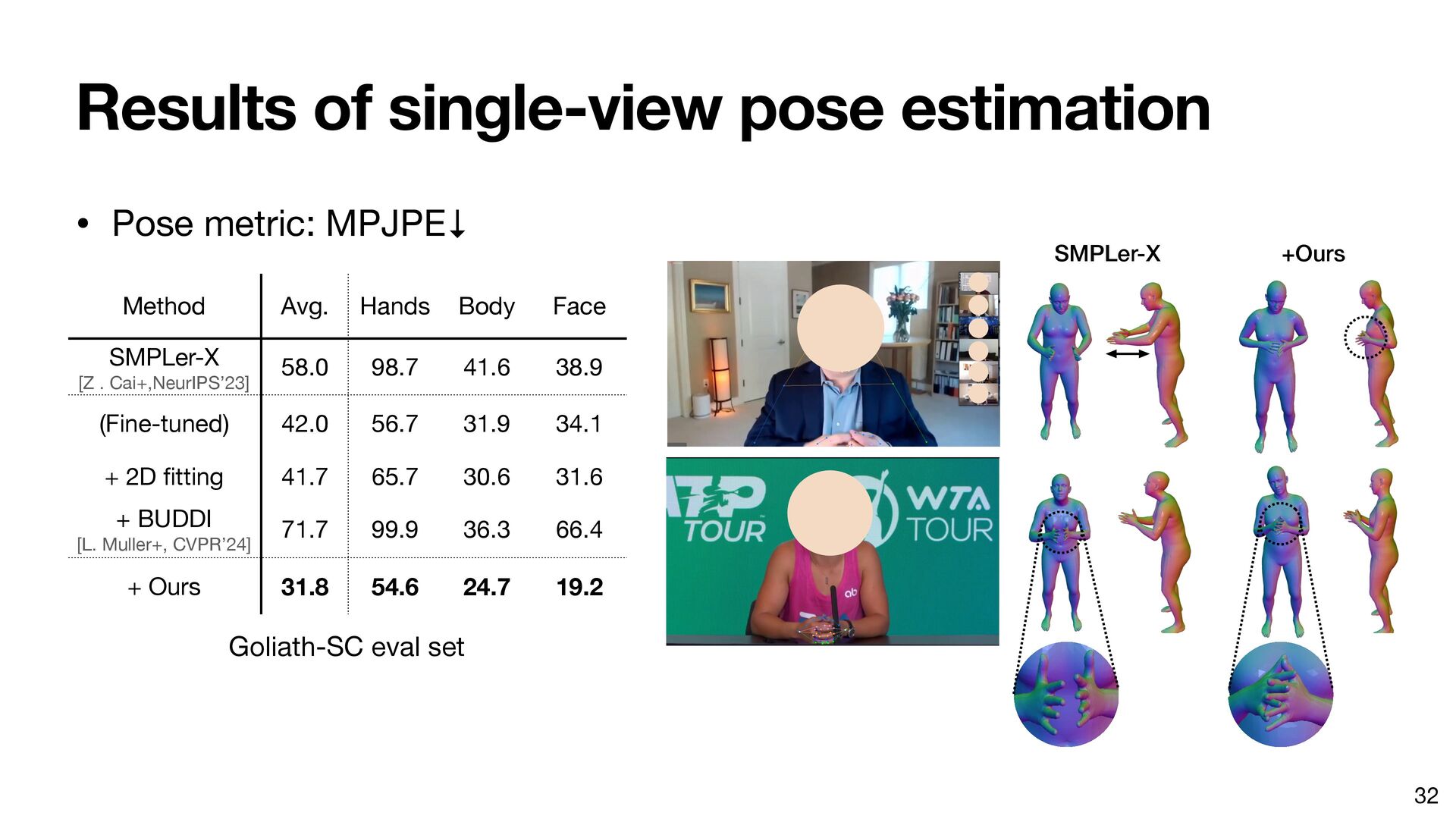
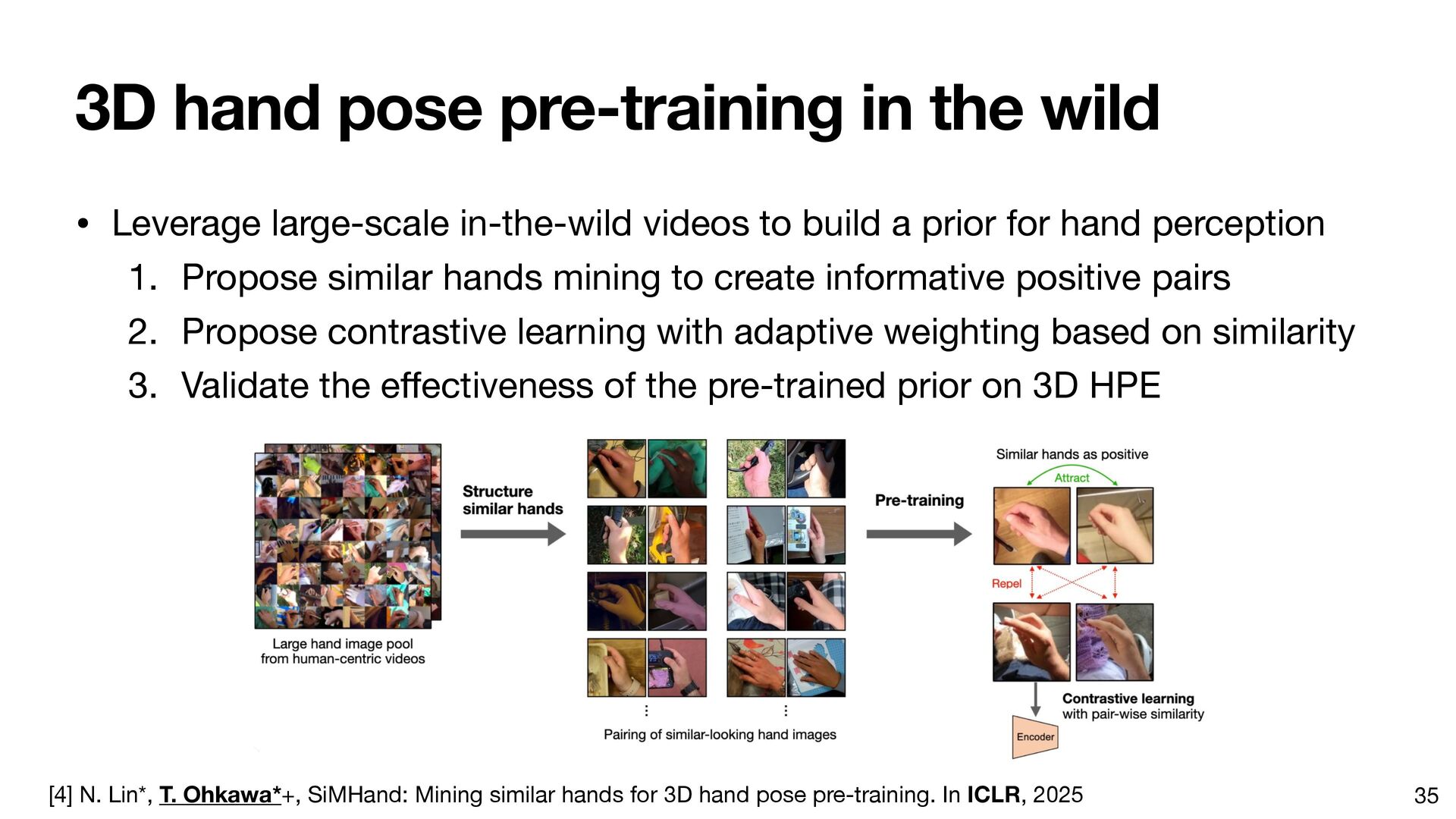
Generative modeling of shape-dependent self-contact human poses. In ICCV, 2025 4. N. Lin*, T. Ohkawa*, M. Zhang, Y. Huang, R. Furuta, and Y. Sato.
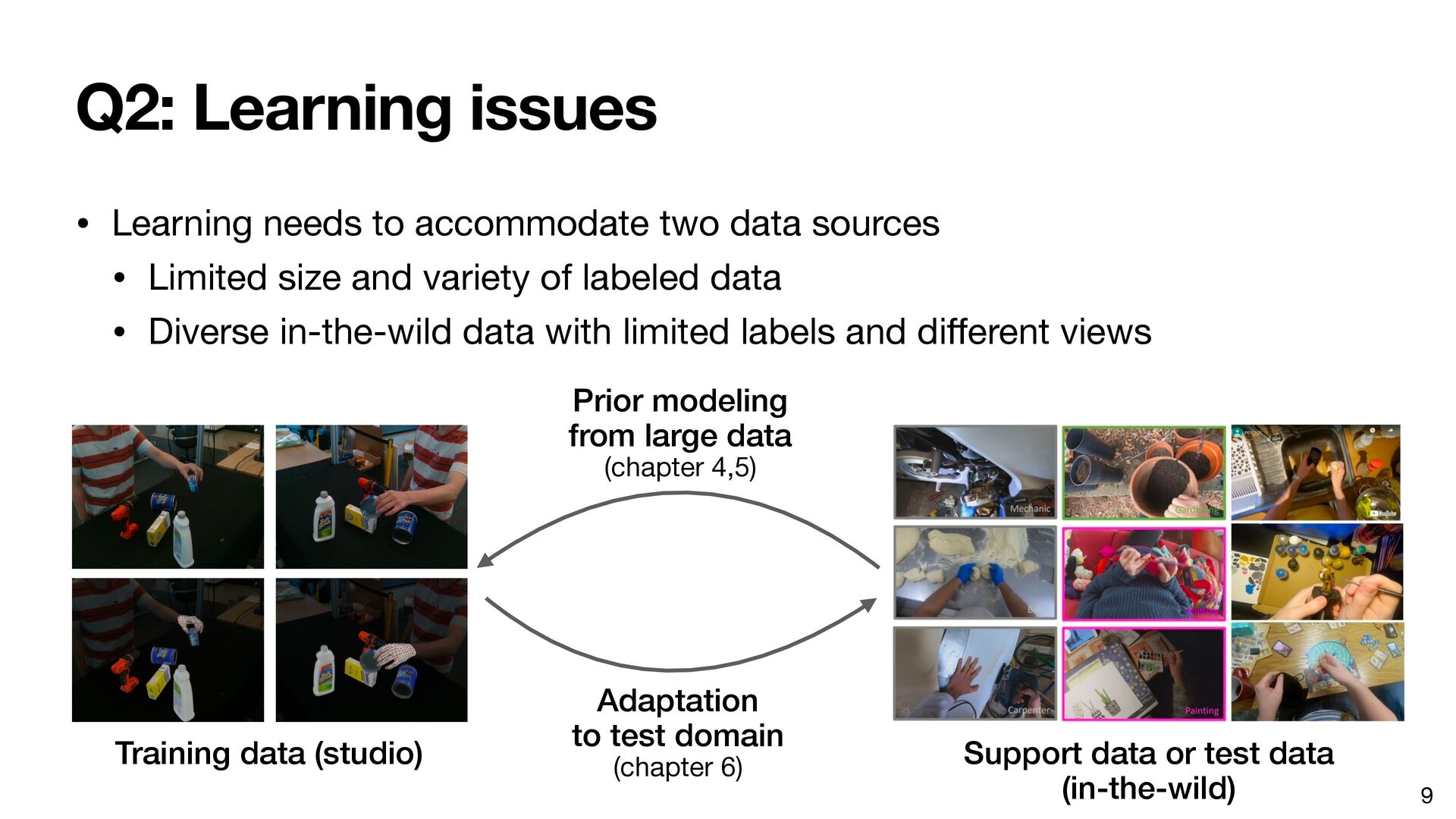
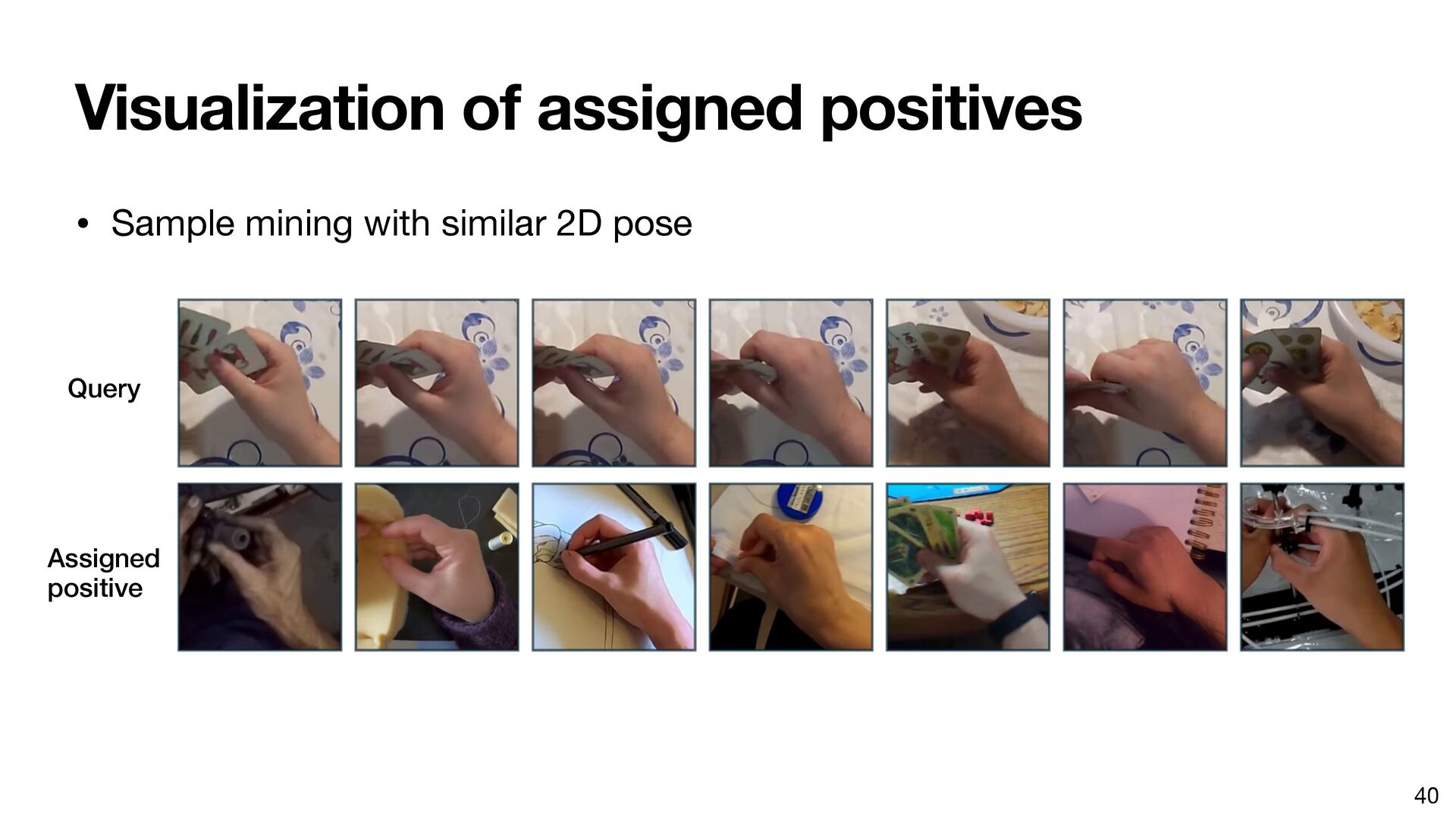
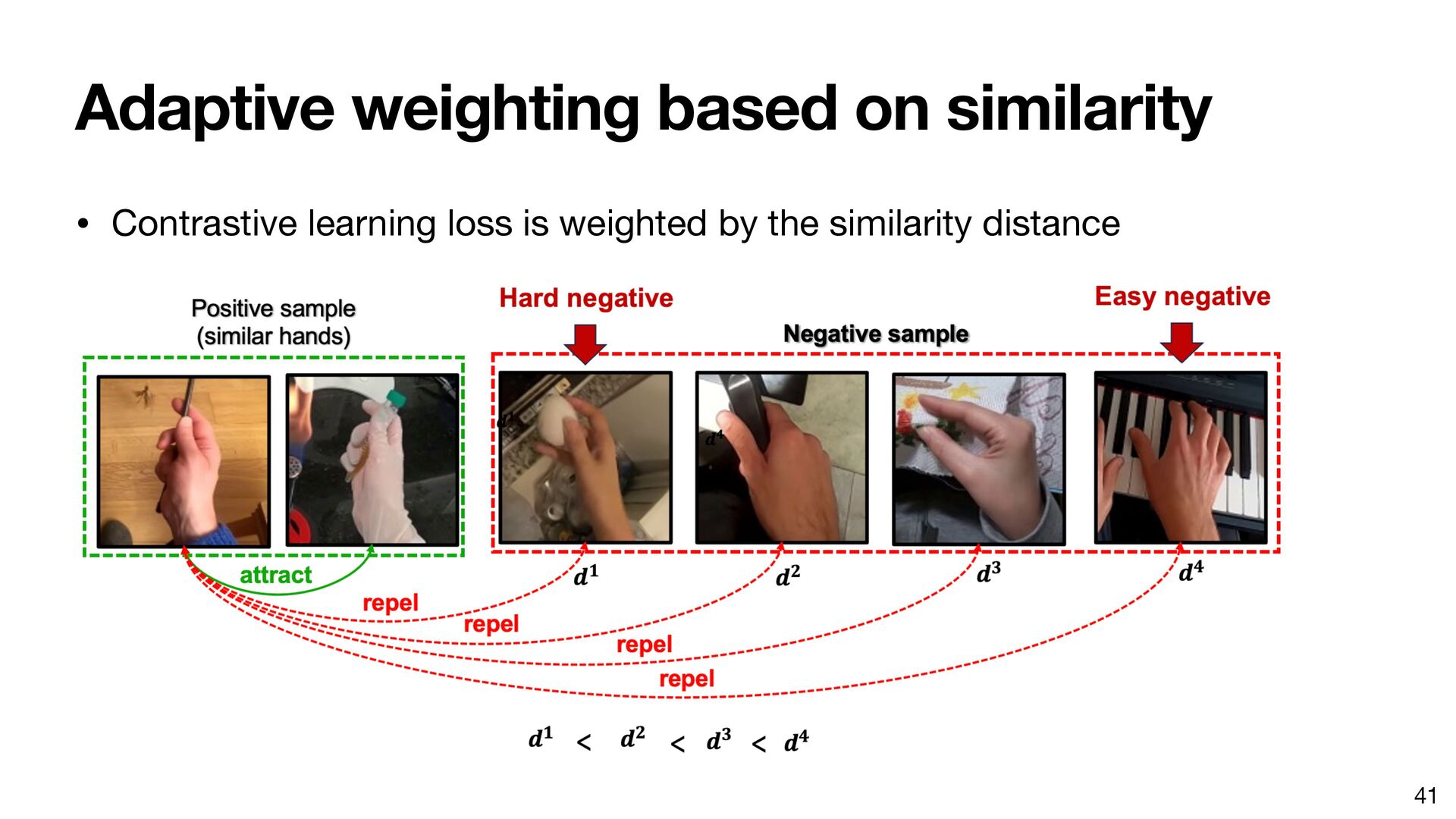
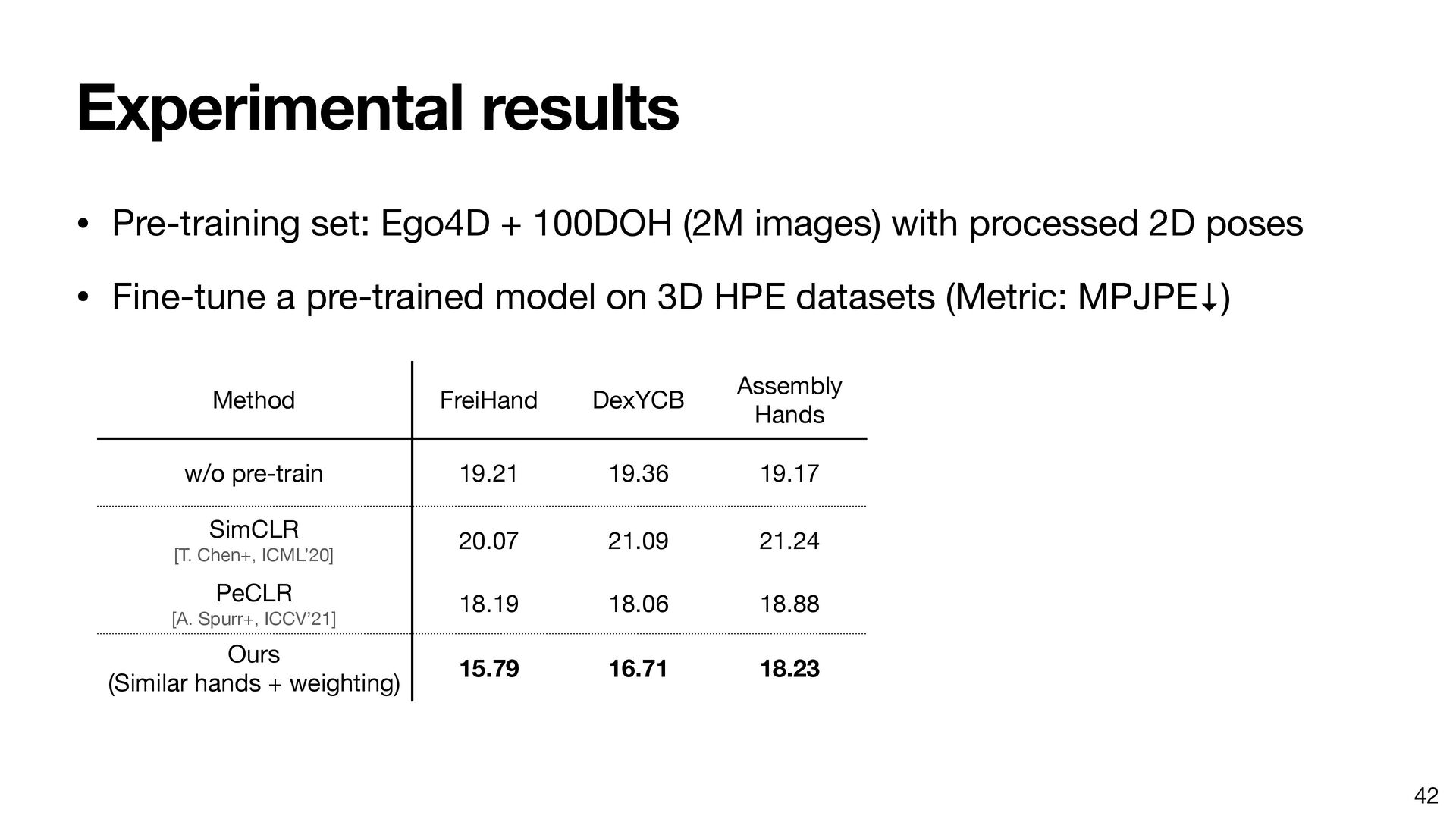
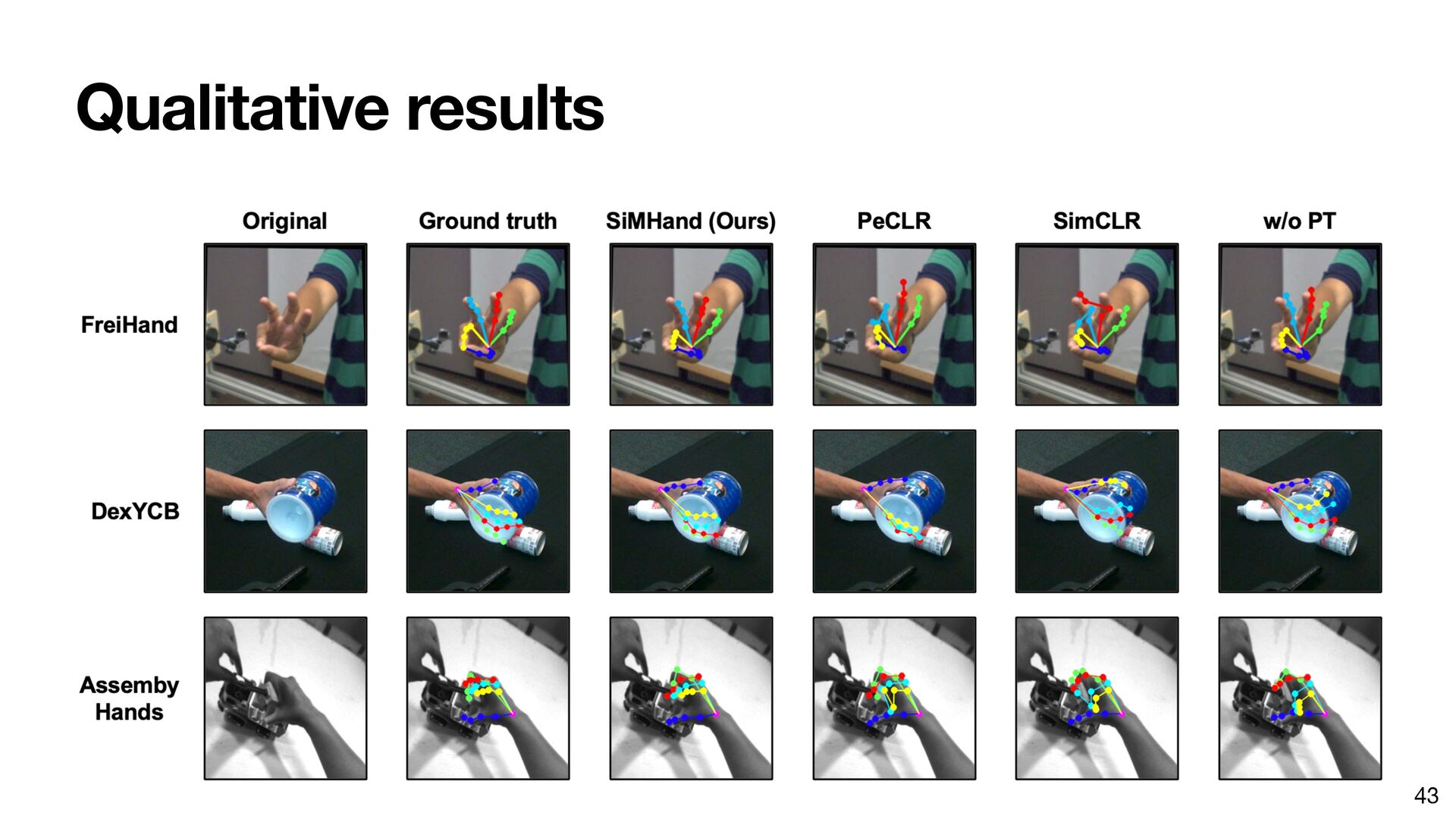
SiMHand: Mining of similar hands for large-scale 3D hand pose pre-training. In ICLR, 2025 5. T. Ohkawa, Y.-J. Li, Q. Fu, R. Furuta, K. M. Kitani, and Y. Sato.
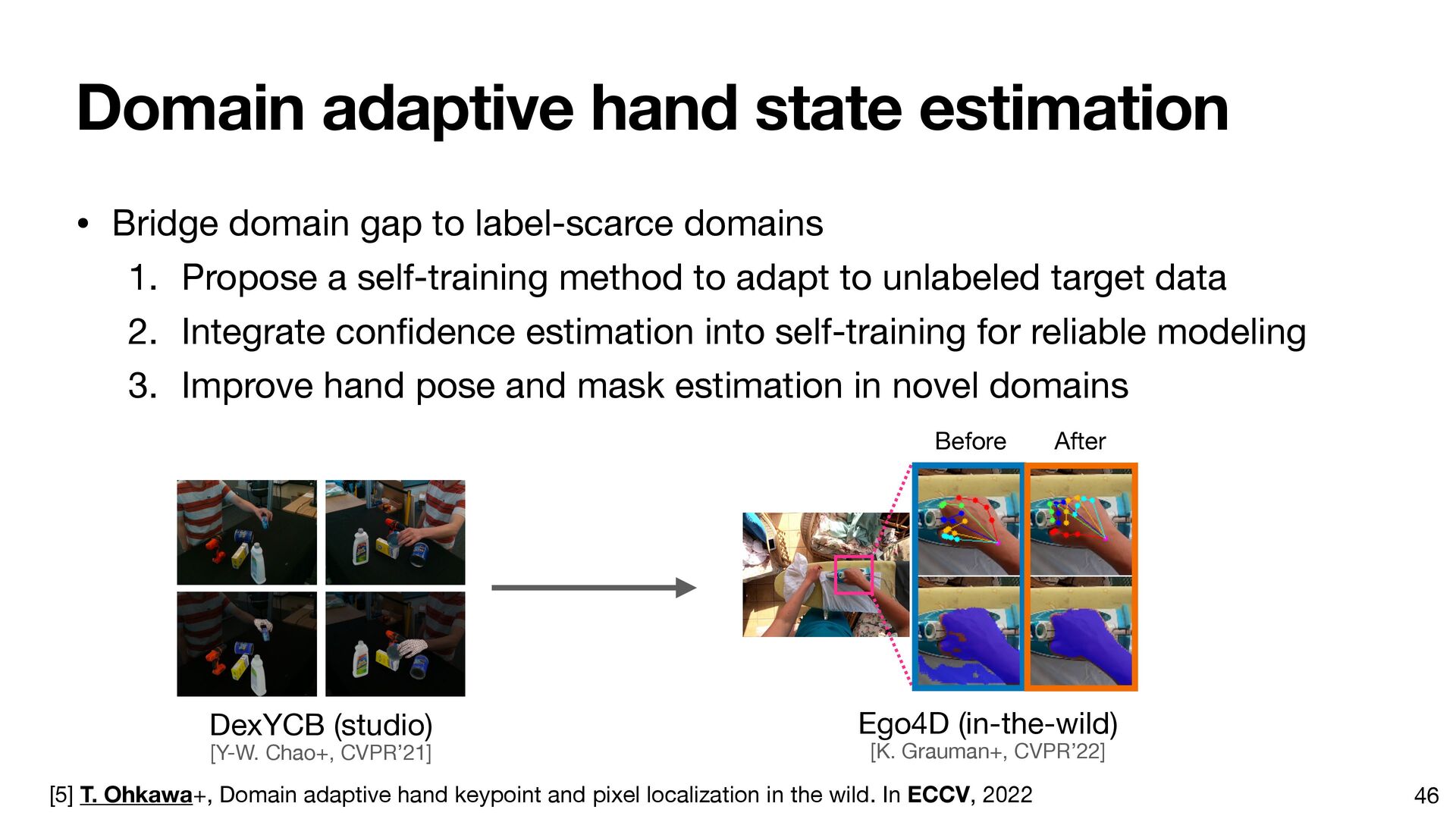
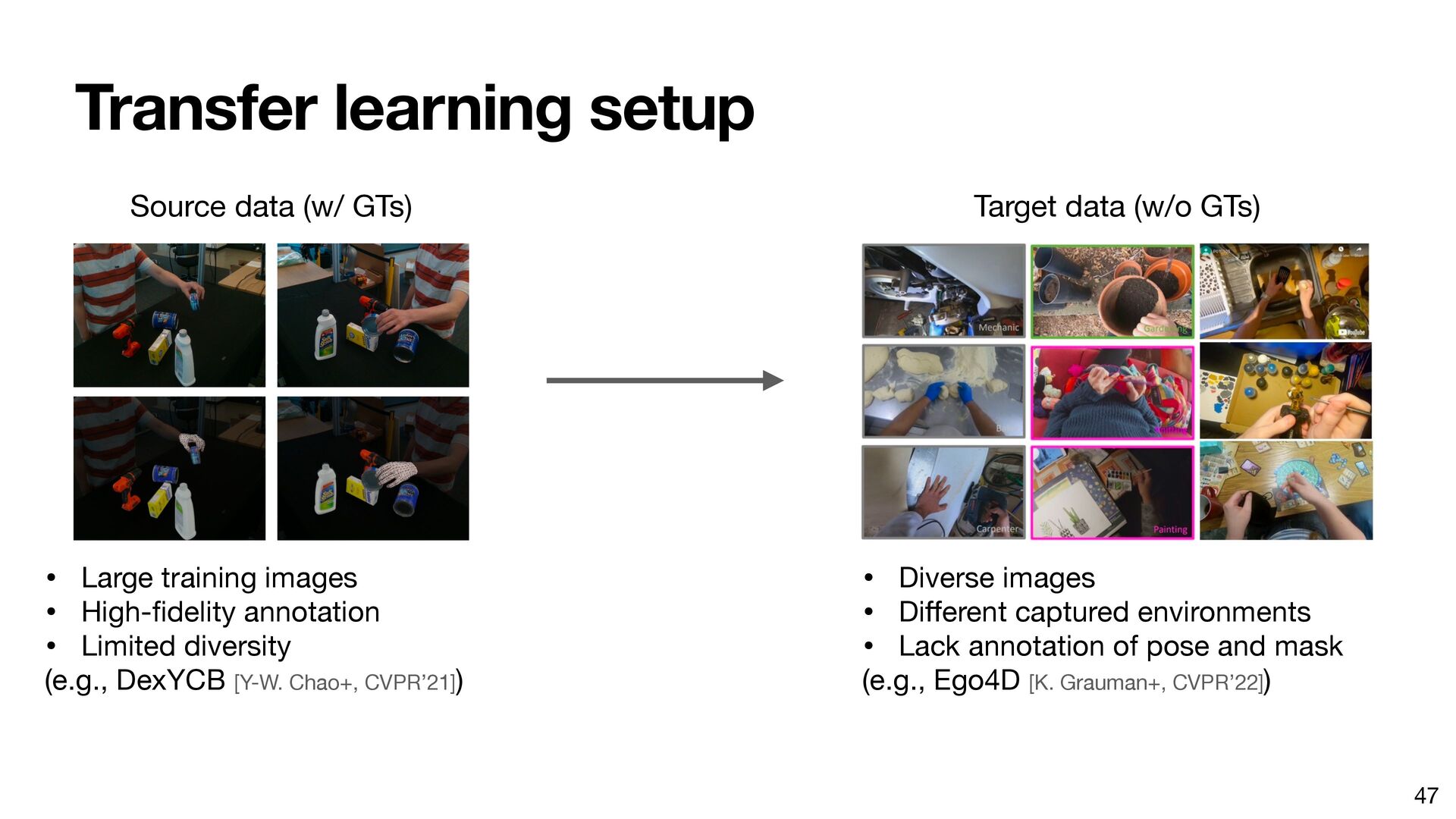
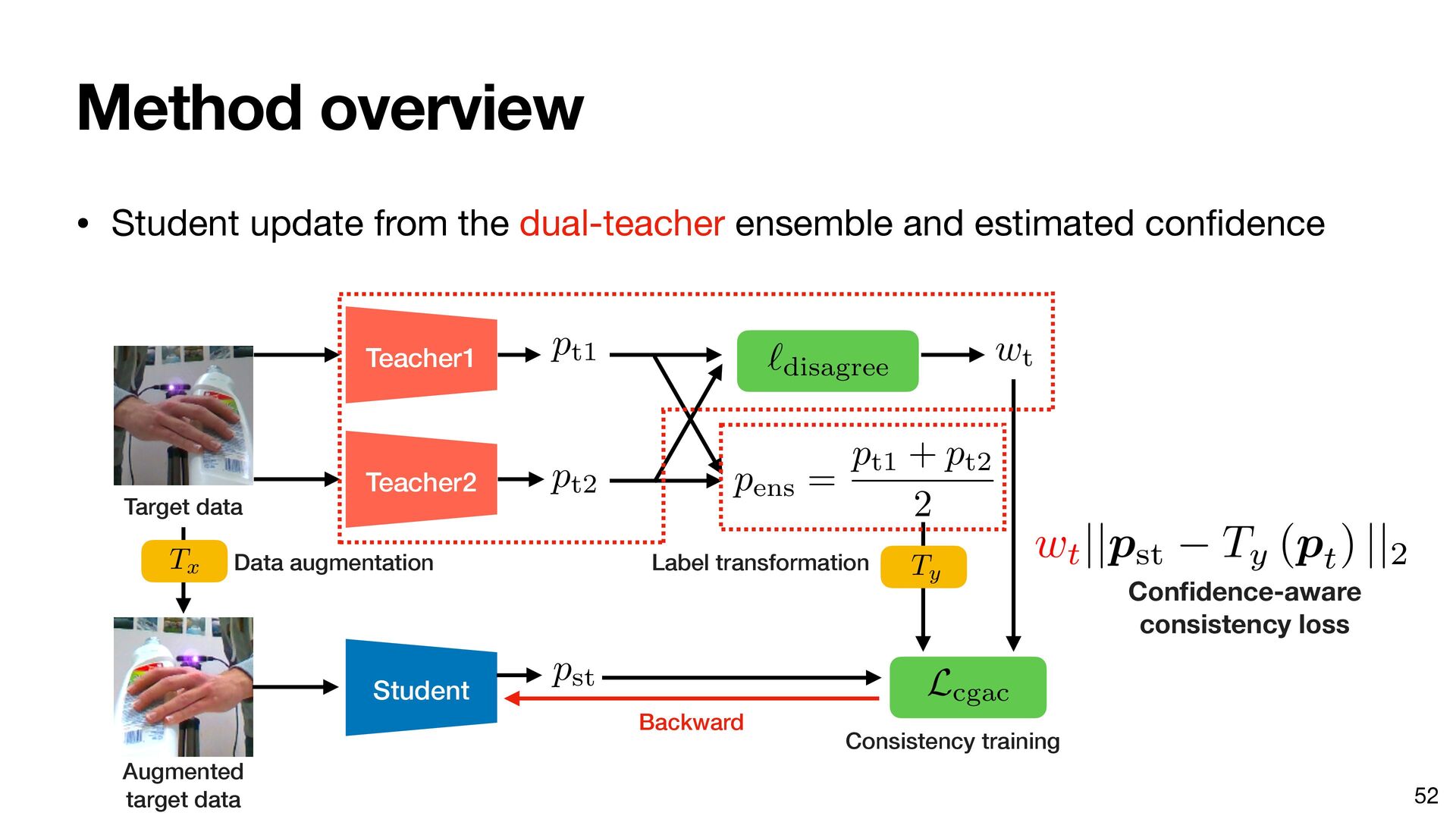
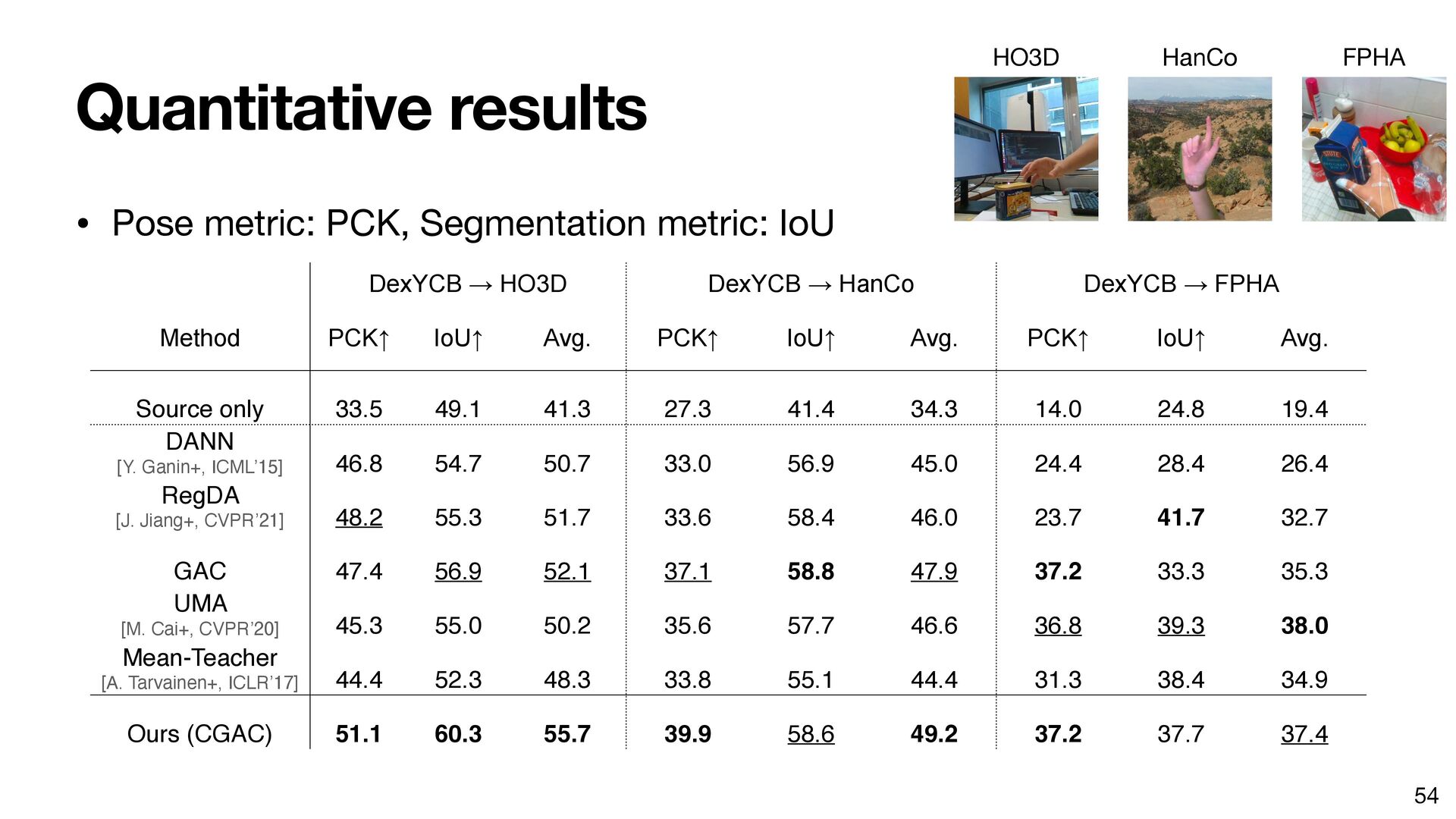
Domain adaptive hand keypoint and pixel localization in the wild. In ECCV, 2022 6. T. Ohkawa, T. Yagi, T. Nishimura, R. Furuta, A. Hashimoto, Y. Ushiku, and Y. Sato.
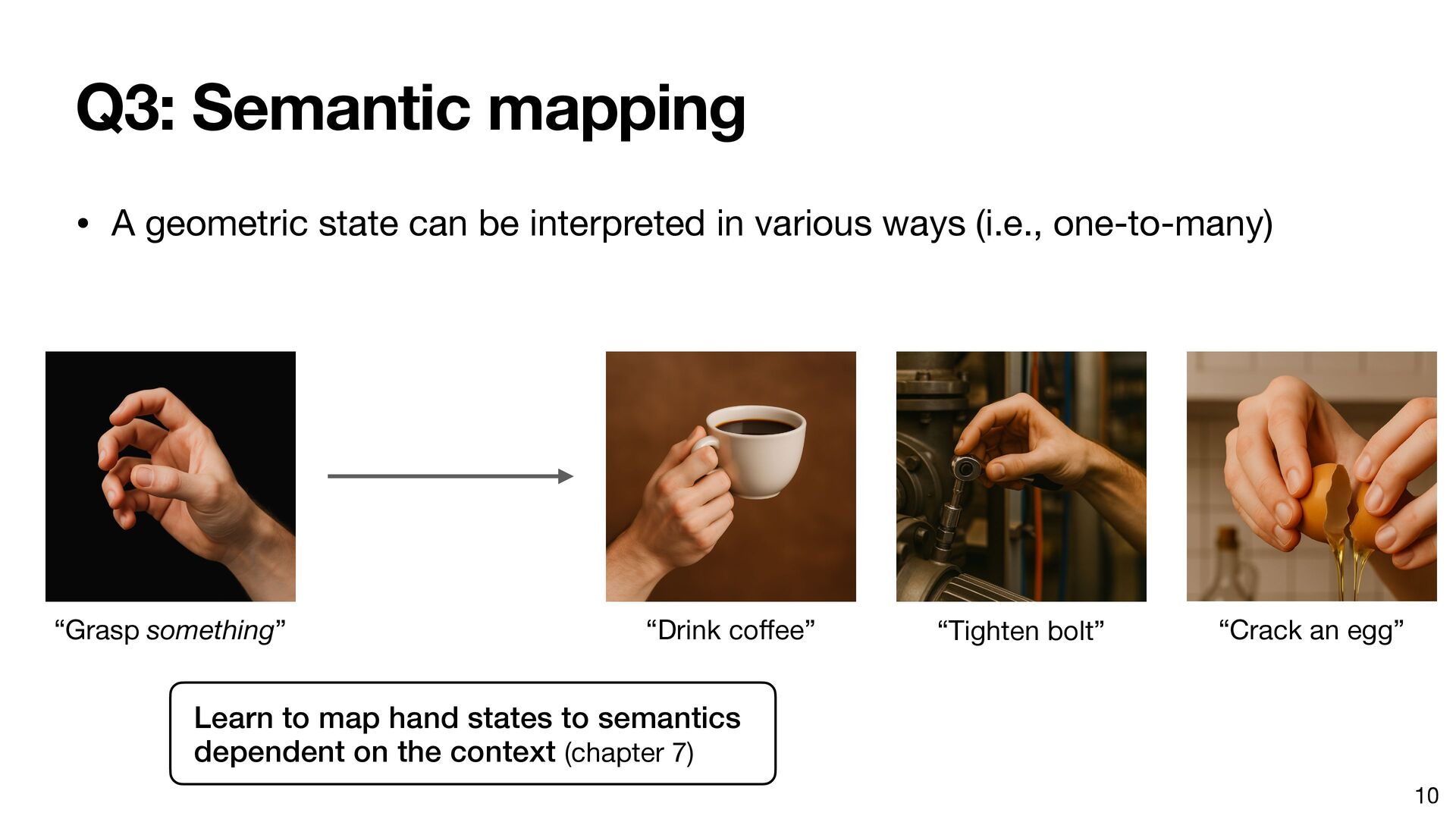
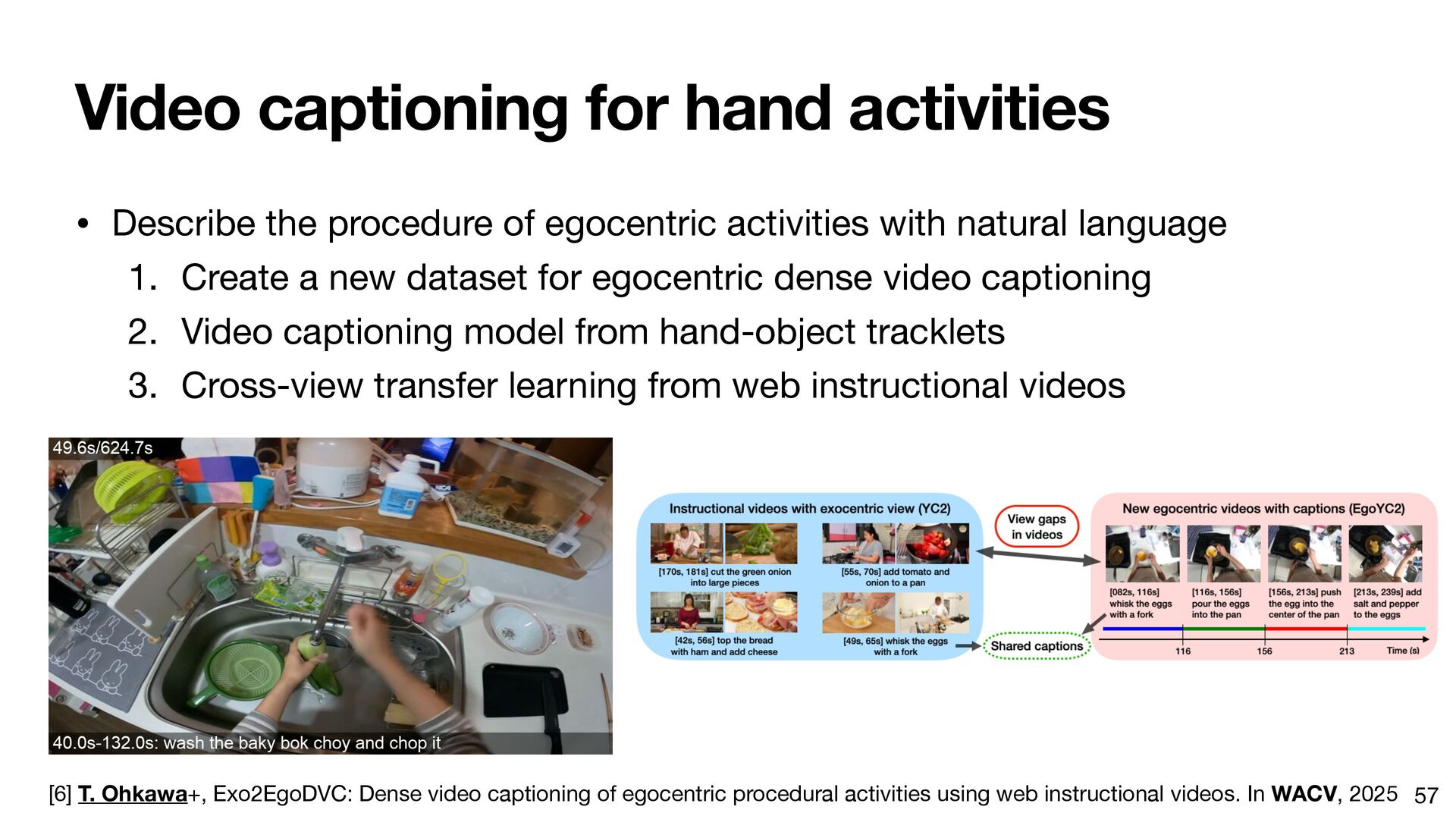
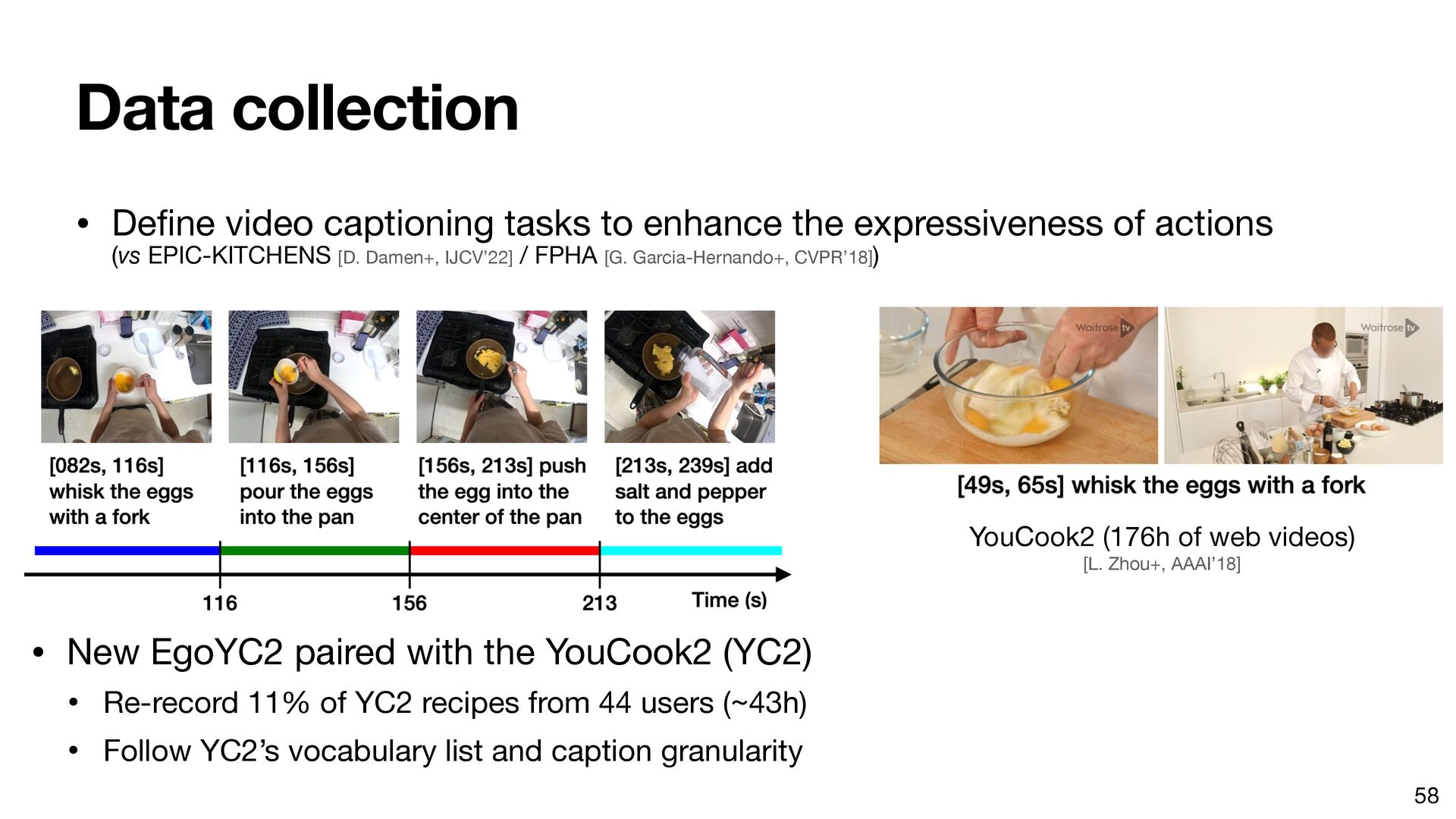
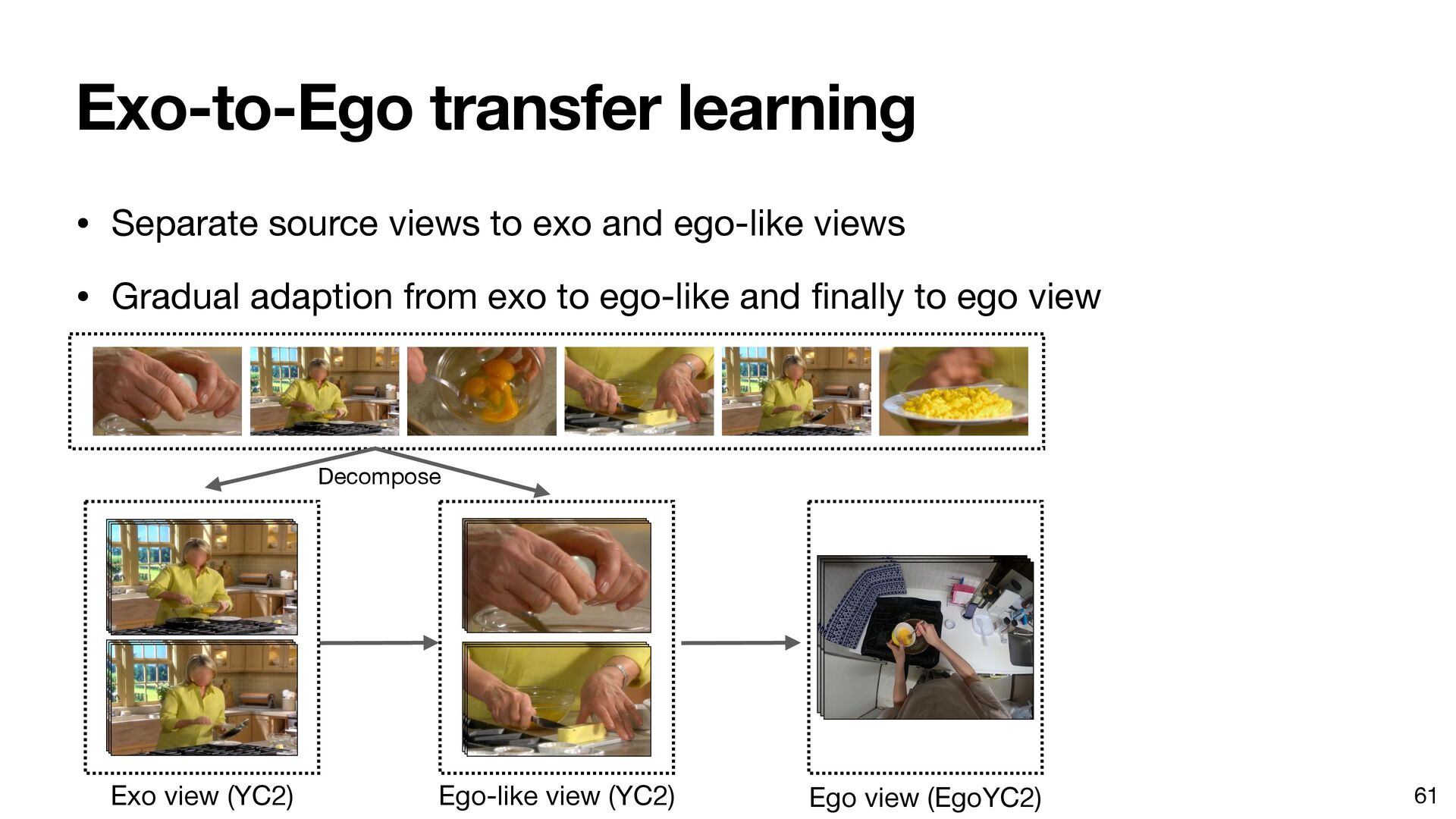
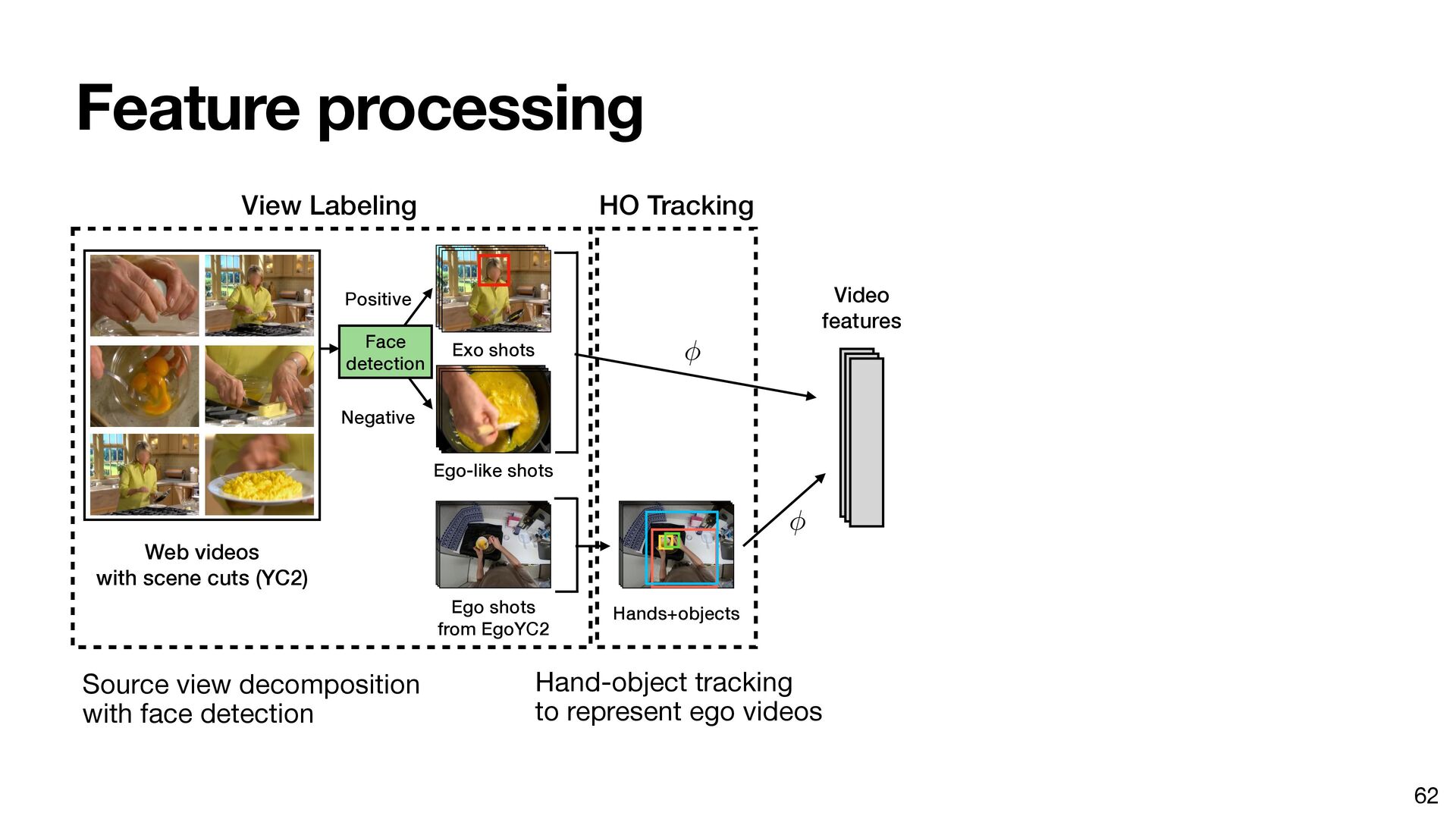
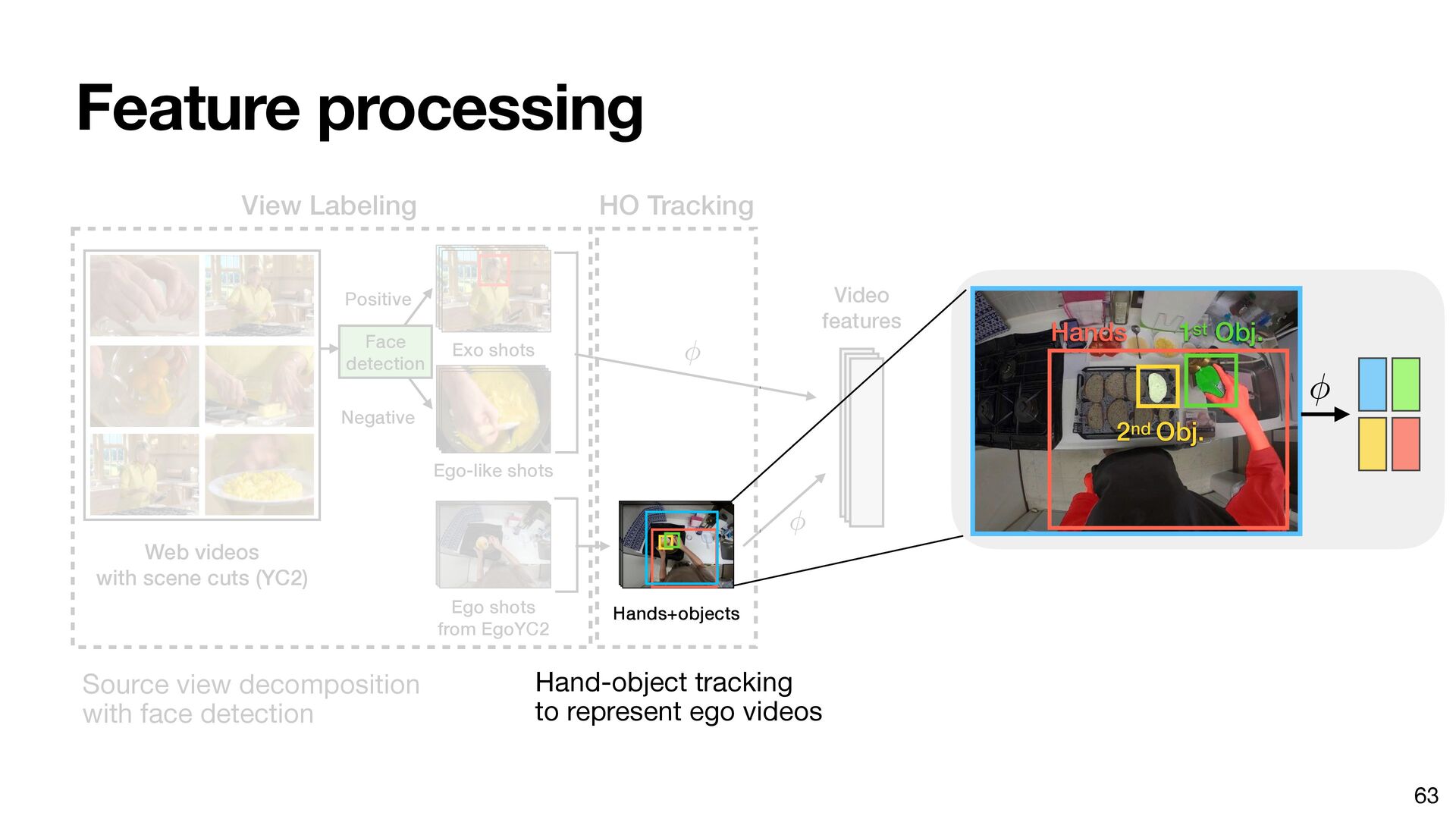
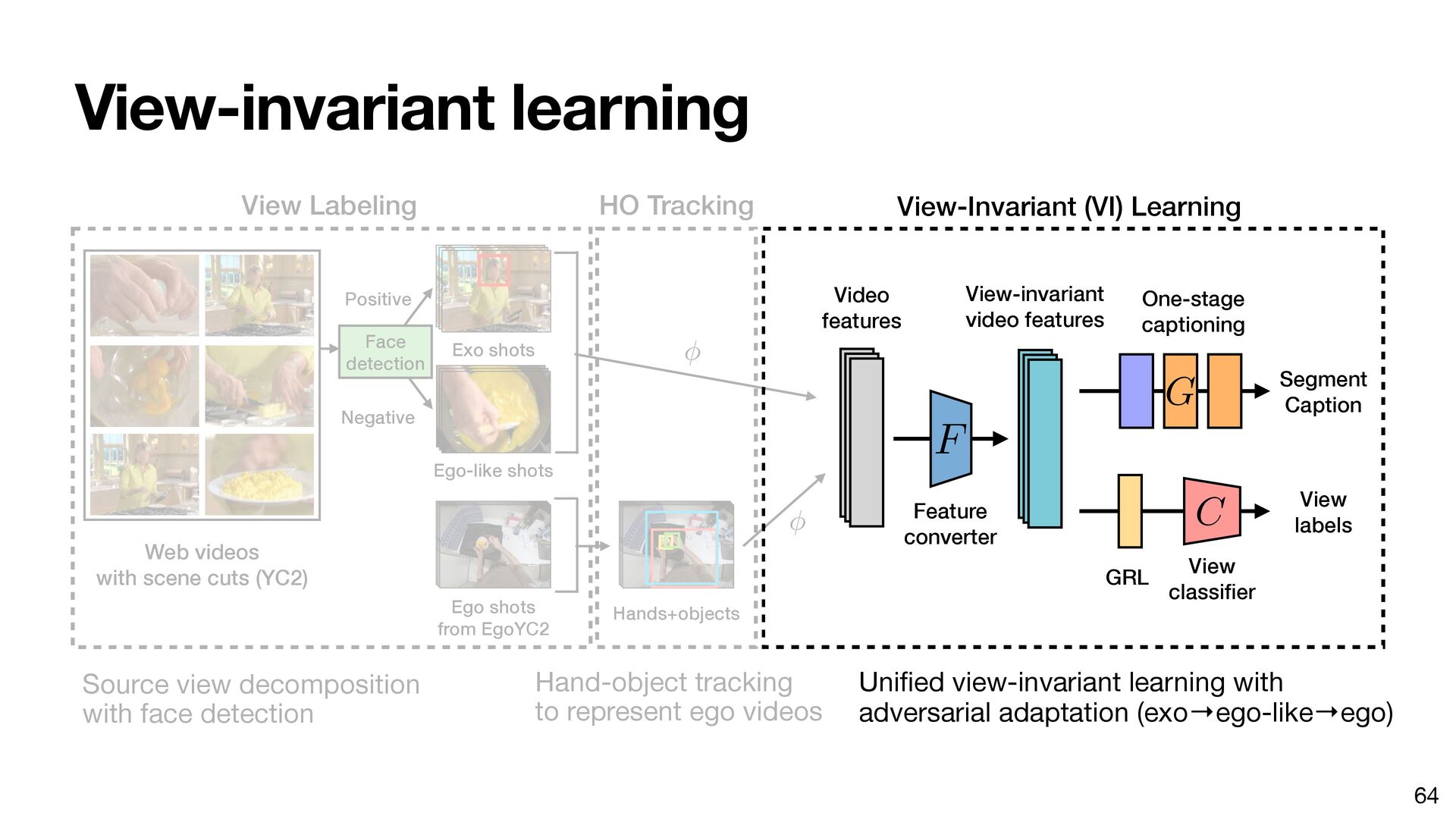
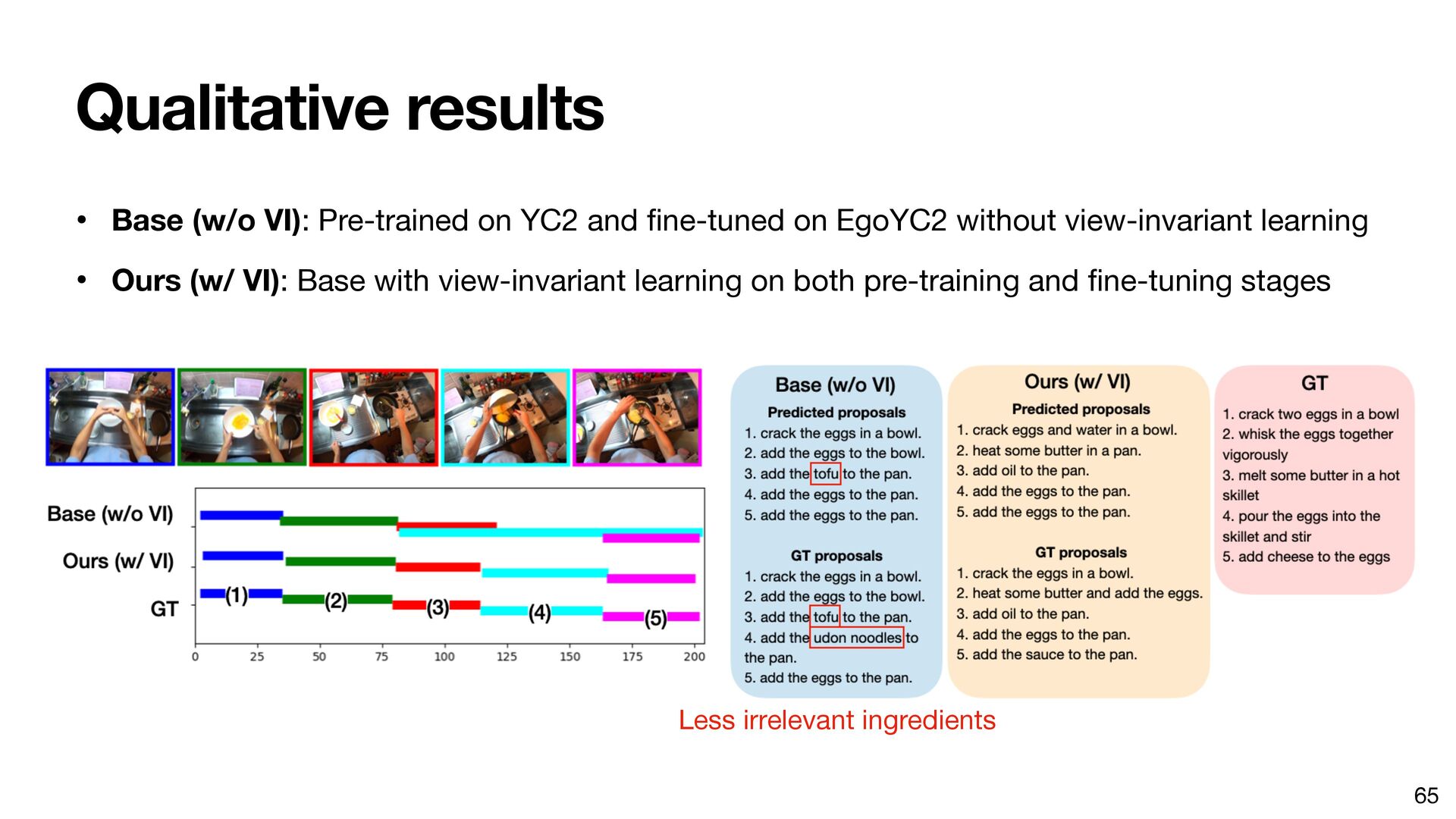
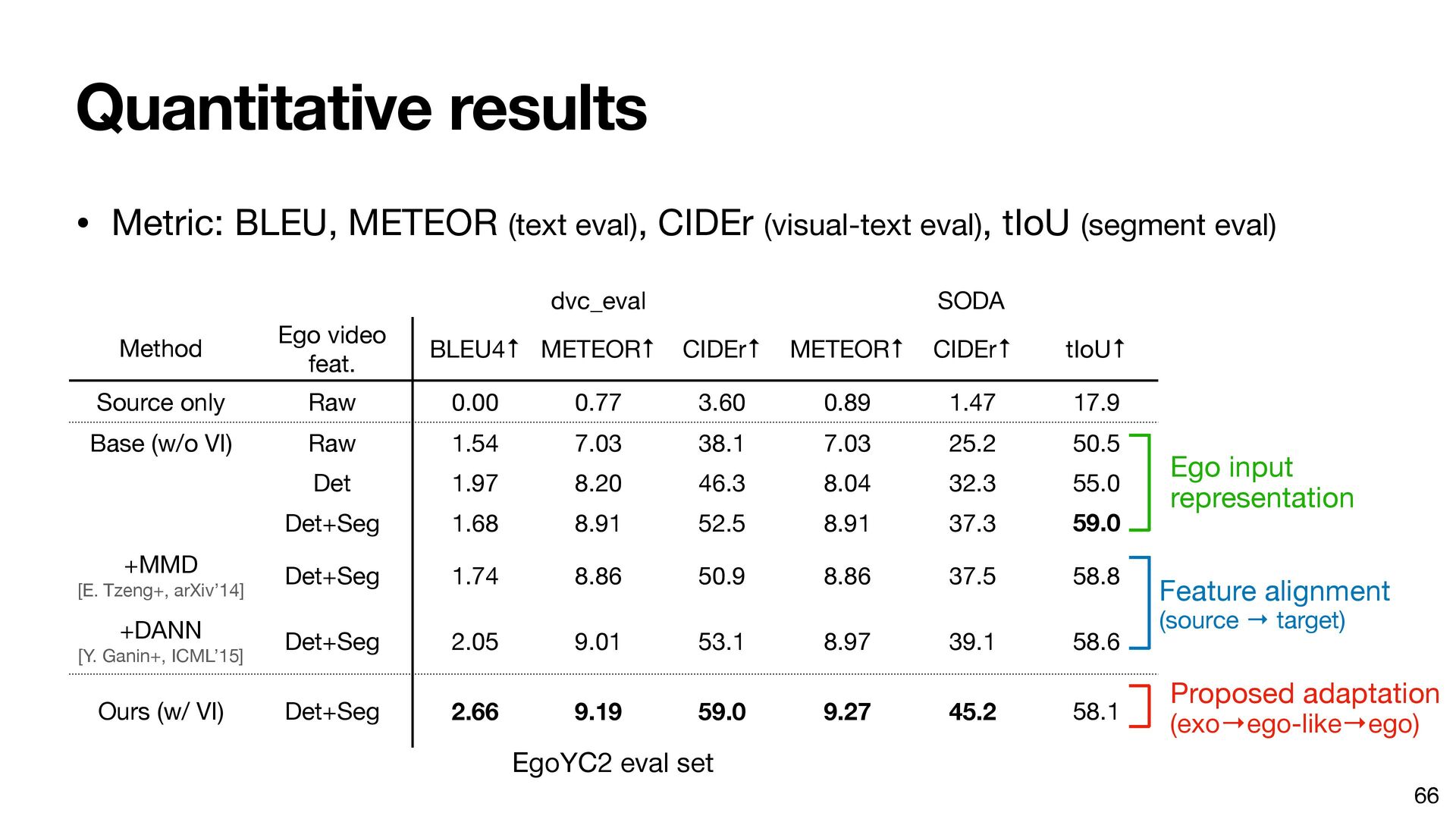
Exo2EgoDVC: Dense video captioning of egocentric procedural activities using web instructional videos. In WACV, 2025
aa Related publications not covered by the thesis A. T. Ohkawa, K. He, F. Sener, T. Hodan, L. Tran, and C. Keskin.
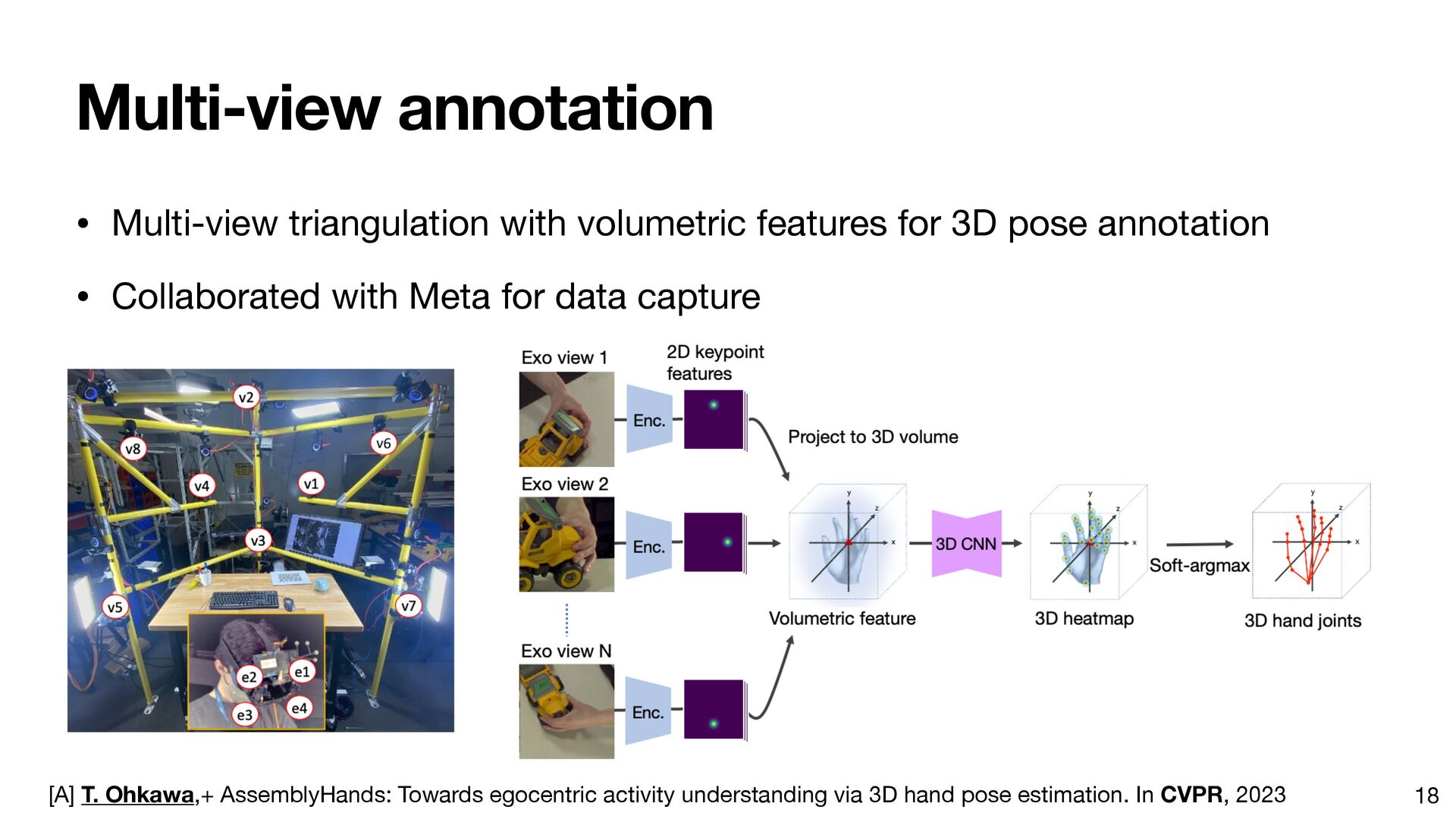
AssemblyHands: Towards egocentric activity understanding via 3D hand pose estimation. In CVPR, 2023 B. T. Banno, T. Ohkawa, R. Liu, R. Furuta, and Y. Sato.
AssemblyHands-X: 3D hand-body co-registration for understanding bi-manual human activities. In MIRU, 2025 C. R. Liu, T. Ohkawa, M. Zhang, and Y. Sato.
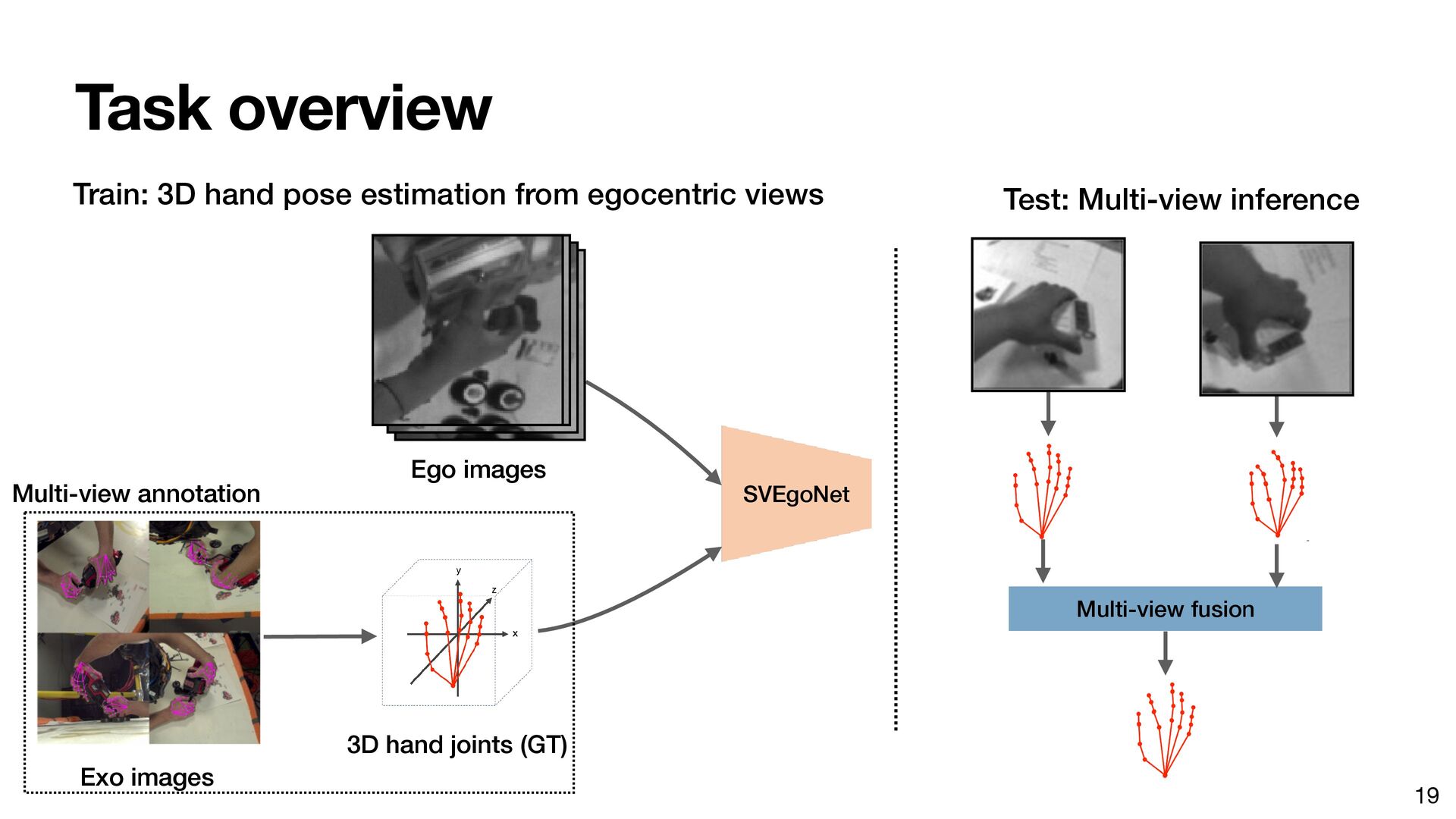
Single-to-dual-view adaptation for egocentric 3D hand pose estimation. In CVPR, 2024 D. T. Ohkawa, T. Yagi, A. Hashimoto, Y. Ushiku, and Y. Sato.
Foreground-aware stylization and consensus pseudo-labeling for domain adaptation of fi rst-person hand segmentation. IEEE Access, 2021
aa Awards / Fellowships • CVPR EgoVis Distinguished Paper Award’25, Google PhD Fellowship’24, ETH Zurich Leading House Asia’23,
MSRA D-CORE’23, JSPS DC1’22, JST ACT-X (’20-’22, Accel.’23) 71
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![AssemblyHands 17 [A] T. Ohkawa,+ AssemblyHands: Towards egocentric activity understanding](https://files.speakerdeck.com/presentations/bad0d32589b44bf49e8772e12f27dbce/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
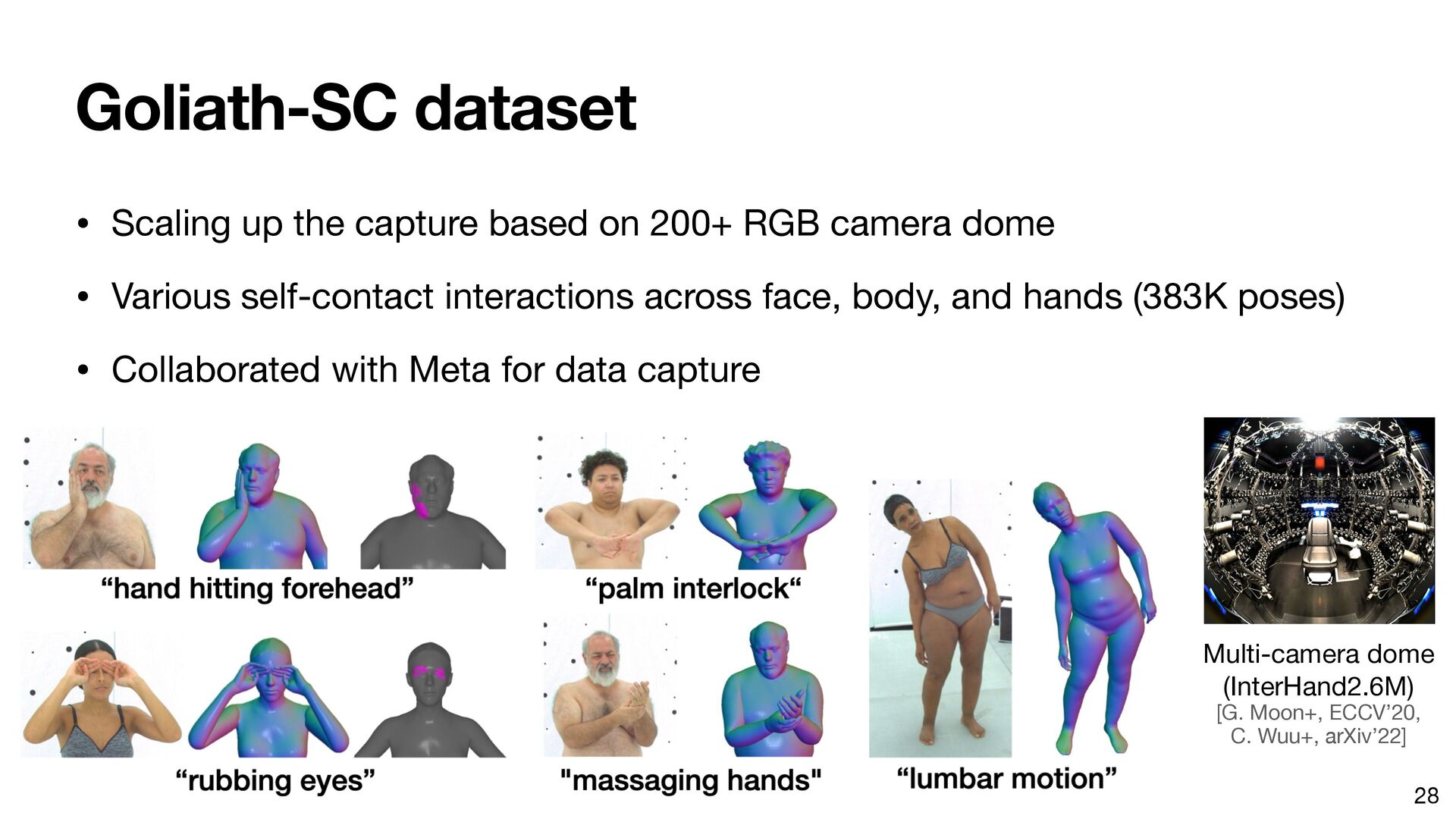
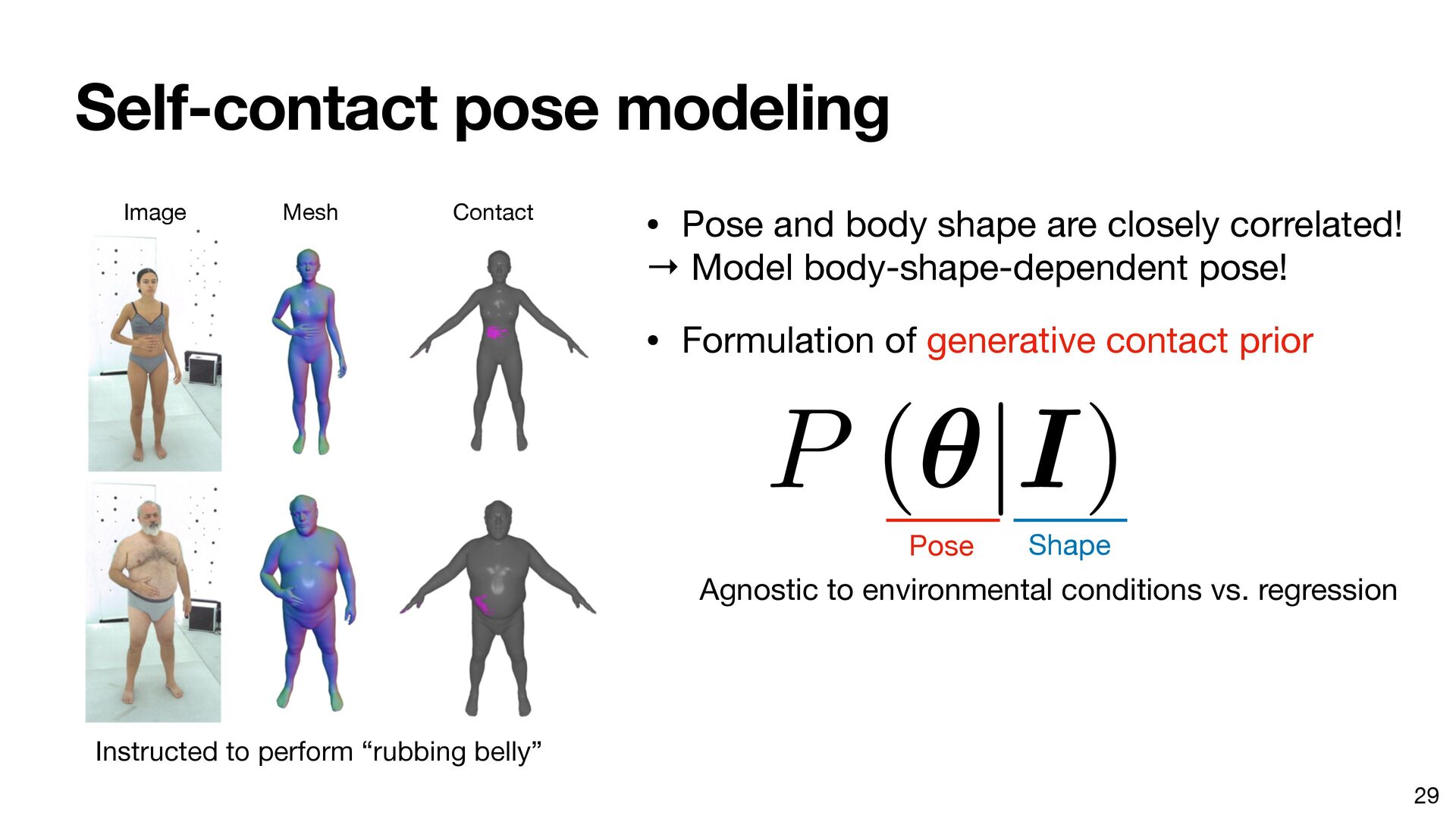
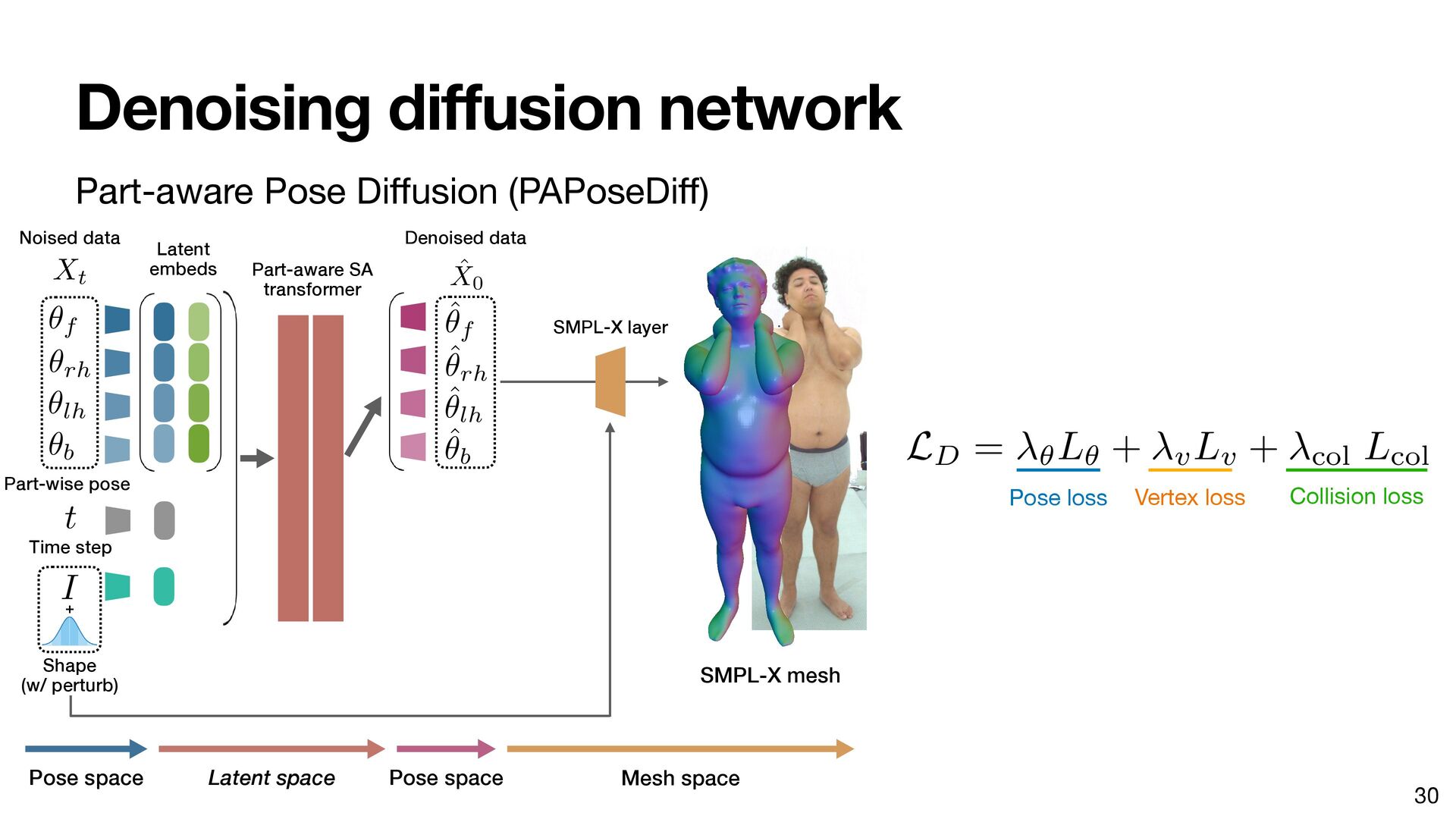
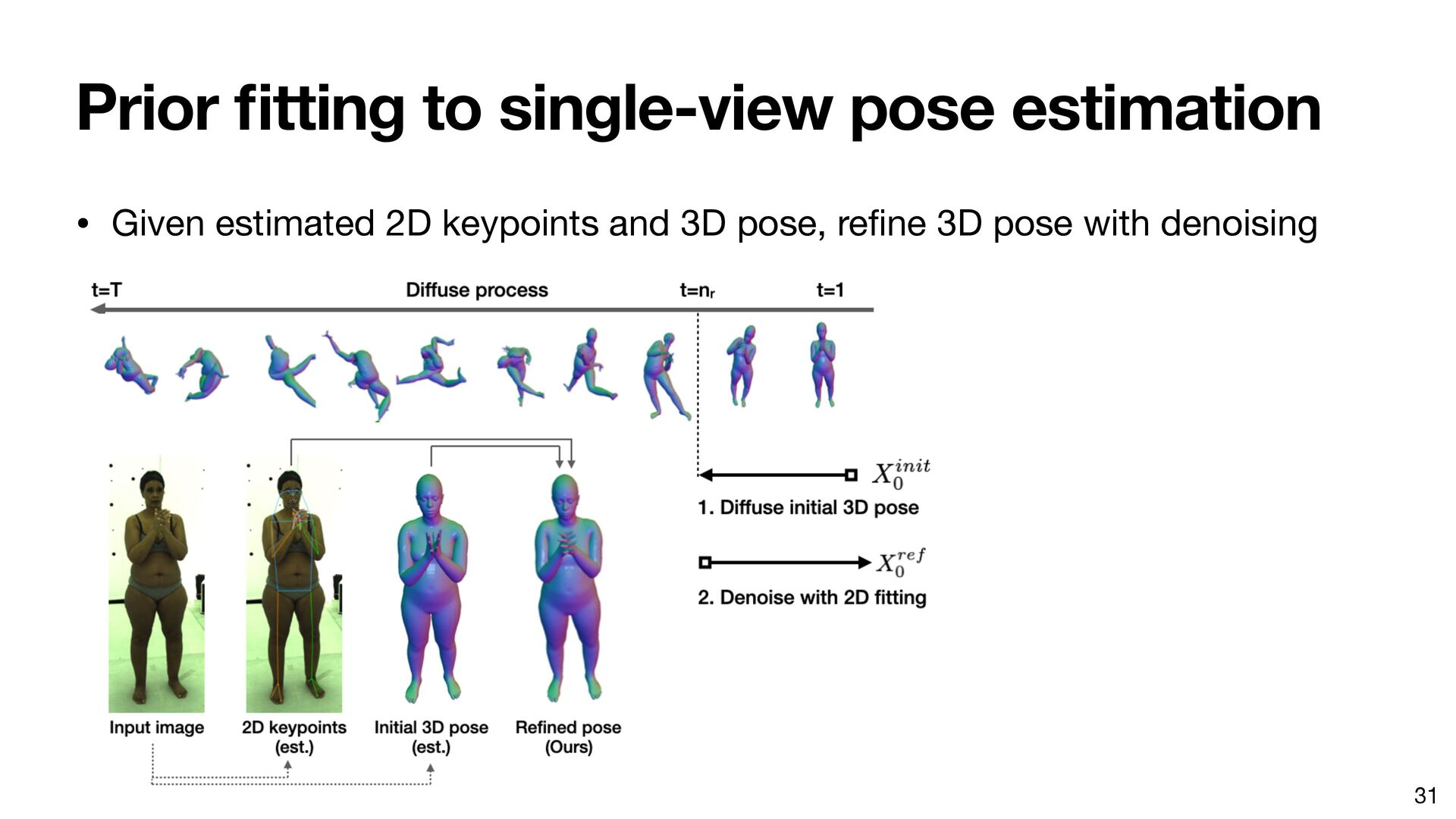
![Self-contact data and generative modeling 25 [3] T. Ohkawa+, Generative](https://files.speakerdeck.com/presentations/bad0d32589b44bf49e8772e12f27dbce/slide_24.jpg){kind=link}
{kind=link}
![Limitations of existing self-contact datasets 27 Human3DSC [M. Fieraru+, AAAI’21]](https://files.speakerdeck.com/presentations/bad0d32589b44bf49e8772e12f27dbce/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}