Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
つくばチャレンジ2023EX@イーアスつくば課題コース
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
つくばチャレンジ実行委員会
August 14, 2023
Technology
3.6k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
つくばチャレンジ2023EX@イーアスつくば課題コース
つくばチャレンジ2023EX@イーアスつくば説明会 - connpass
https://tsukubachallenge.connpass.com/event/285735/
つくばチャレンジ実行委員会
August 14, 2023
More Decks by つくばチャレンジ実行委員会
See All by つくばチャレンジ実行委員会
つくばチャレンジ2024EX@イーアスつくば課題コース
tsukubachallenge
0
2k
つくばチャレンジ2024全体概要
tsukubachallenge
0
810
つくばチャレンジ2024EX@イーアスつくば概要
tsukubachallenge
0
730
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場課題コース
tsukubachallenge
0
1.9k
つくばチャレンジ2023第2回LT大会オープニング
tsukubachallenge
0
500
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場概要
tsukubachallenge
0
1.7k
つくばチャレンジ2023EX with PLATEAU チュートリアル
tsukubachallenge
0
3.5k
つくばチャレンジ2023第1回LT大会オープニング
tsukubachallenge
0
570
つくばチャレンジ2023EX@イーアスつくば概要
tsukubachallenge
0
870
Other Decks in Technology
See All in Technology
誤解だらけの開発生産性 / Myths and Misconceptions about Developer Productivity
i35_267
1
240
脱金融のフューチャー・デザイン / Future Design Beyond Finance
ks91
PRO
0
150
10年目を迎えた「ABEMA」がどのように AI 活用を推進して、AI 駆動開発にシフトしているのか / How ABEMA, entering its 10th year, is promoting the use of AI and shifting toward AI-driven development
miyukki
0
130
Kaggleで成長するために意識したこと
prgckwb
2
310
「ちゃんとやっている」は独りよがりだった ― 不安に寄り添うインシデント対応へ / Towards incident response that addresses anxieties
chmikata
1
5k
AI駆動開発におけるQAエンジニアの役割事例 〜AI駆動開発の現場から〜
kobayashiyorimitsu
0
500
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
280
ローカルLLMとLINE Botの組み合わせ その3 / LINE DC Generative AI Meetup #8
you
PRO
0
130
インフラ寄りSREでも 開発に踏み出せる〜境界を越えてユーザー体験に向き合いたい〜
sansantech
PRO
2
3.7k
Foxgloveについて 実際にExtensionを開発して公開するまでの話 / About Foxglove: The Story of Developing and Releasing an Extension
ry0_ka
0
210
人を動かすのは時間ではなく、納得感 〜新任EMが入社3ヶ月、組織を2回変えた話〜
kakehashi
PRO
3
220
ボーイスカウトルールでメモリやスキルを改善しよう
azukiazusa1
1
760
Featured
See All Featured
Digital Projects Gone Horribly Wrong (And the UX Pros Who Still Save the Day) - Dean Schuster
uxyall
1
1.9k
From π to Pie charts
rasagy
0
230
4 Signs Your Business is Dying
shpigford
187
22k
Site-Speed That Sticks
csswizardry
13
1.2k
Building AI with AI
inesmontani
PRO
1
1.1k
sira's awesome portfolio website redesign presentation
elsirapls
0
300
Designing for humans not robots
tammielis
254
26k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
Bash Introduction
62gerente
615
220k
個人開発の失敗を避けるイケてる考え方 / tips for indie hackers
panda_program
123
22k
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Transcript
つくばチャレンジEX@イーアスつくば 課題コース説明資料 大矢 晃久(筑波大),大川 一也(千葉大),伊達 央(筑波大), 冨沢 哲雄(東京高専),原 祥尭(千葉工大),萬 礼応(筑波大)
待機調整エリア・電源 課題コース ◼ スタート・ゴール ◼ ①センターコート通過判定エリア ◼ ②メインコート通過判定エリア ◼ ③イベントプラザ通過判定エリア
◼ 課題達成の評価方法 本走行のスケジュール ◼ 本走行の出走手順 1 アウトライン
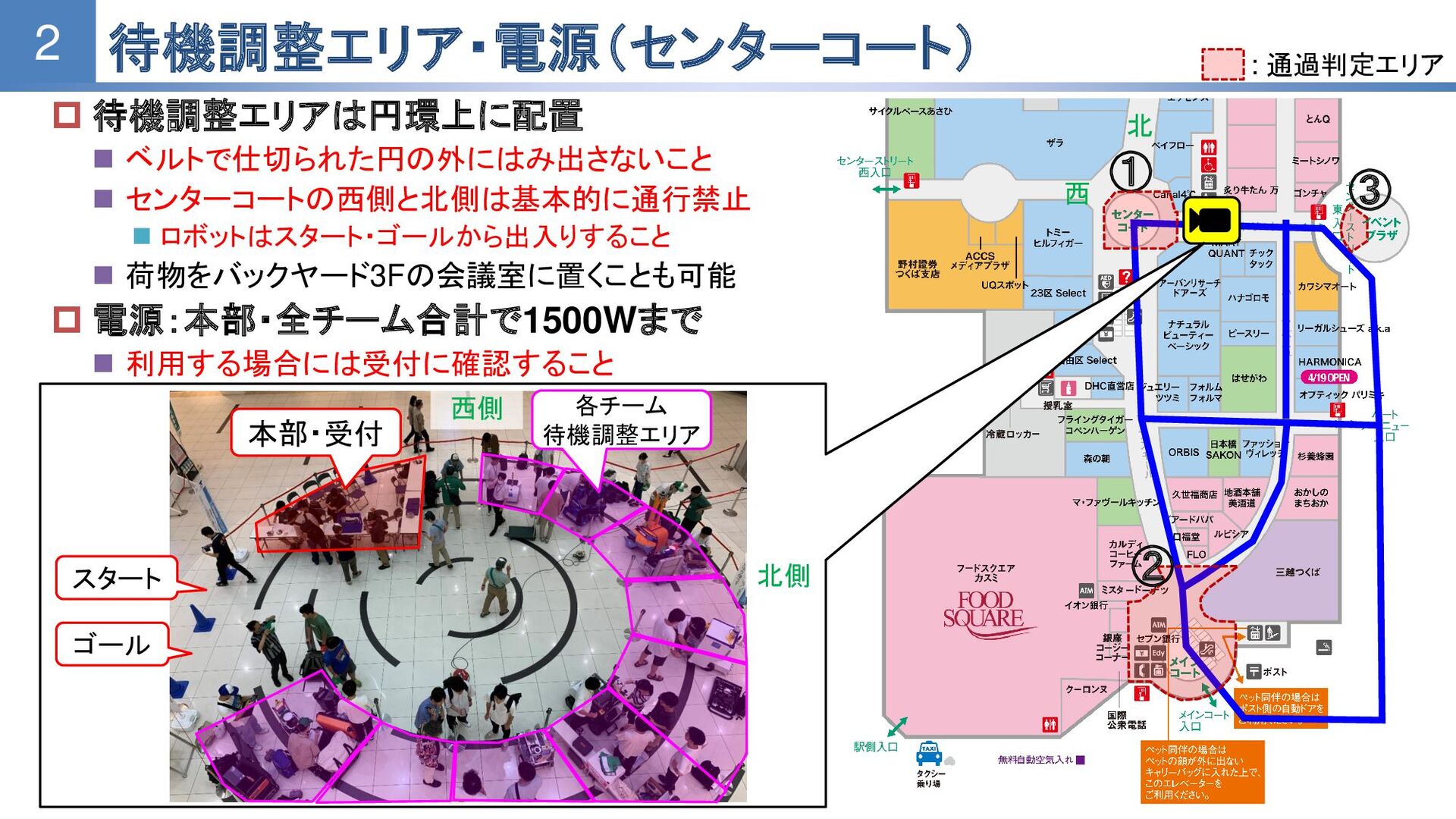
待機調整エリアは円環上に配置 ◼ ベルトで仕切られた円の外にはみ出さないこと ◼ センターコートの西側と北側は基本的に通行禁止 ◼ ロボットはスタート・ゴールから出入りすること ◼ 荷物をバックヤード3Fの会議室に置くことも可能
電源:本部・全チーム合計で1500Wまで ◼ 利用する場合には受付に確認すること 2 待機調整エリア・電源(センターコート) ③ ② ① 本部・受付 各チーム 待機調整エリア スタート ゴール 西 北 西側 北側 : 通過判定エリア
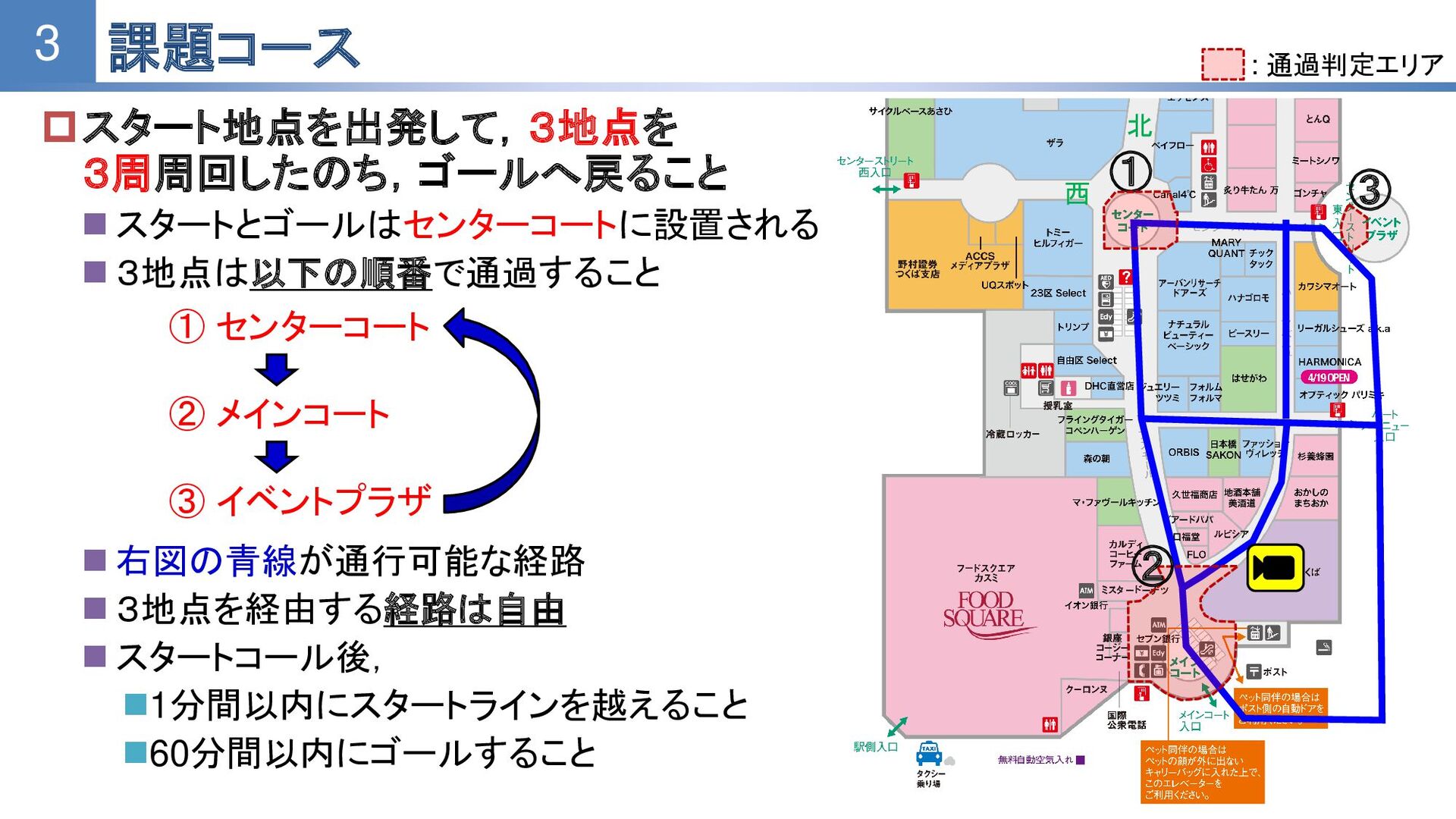
スタート地点を出発して,3地点を 3周周回したのち,ゴールへ戻ること ◼ スタートとゴールはセンターコートに設置される ◼ 3地点は以下の順番で通過すること ◼ 右図の青線が通行可能な経路 ◼ 3地点を経由する経路は自由
◼ スタートコール後, ◼1分間以内にスタートラインを越えること ◼60分間以内にゴールすること 3 課題コース ① センターコート ② メインコート ③ イベントプラザ ③ ② ① 西 北 : 通過判定エリア
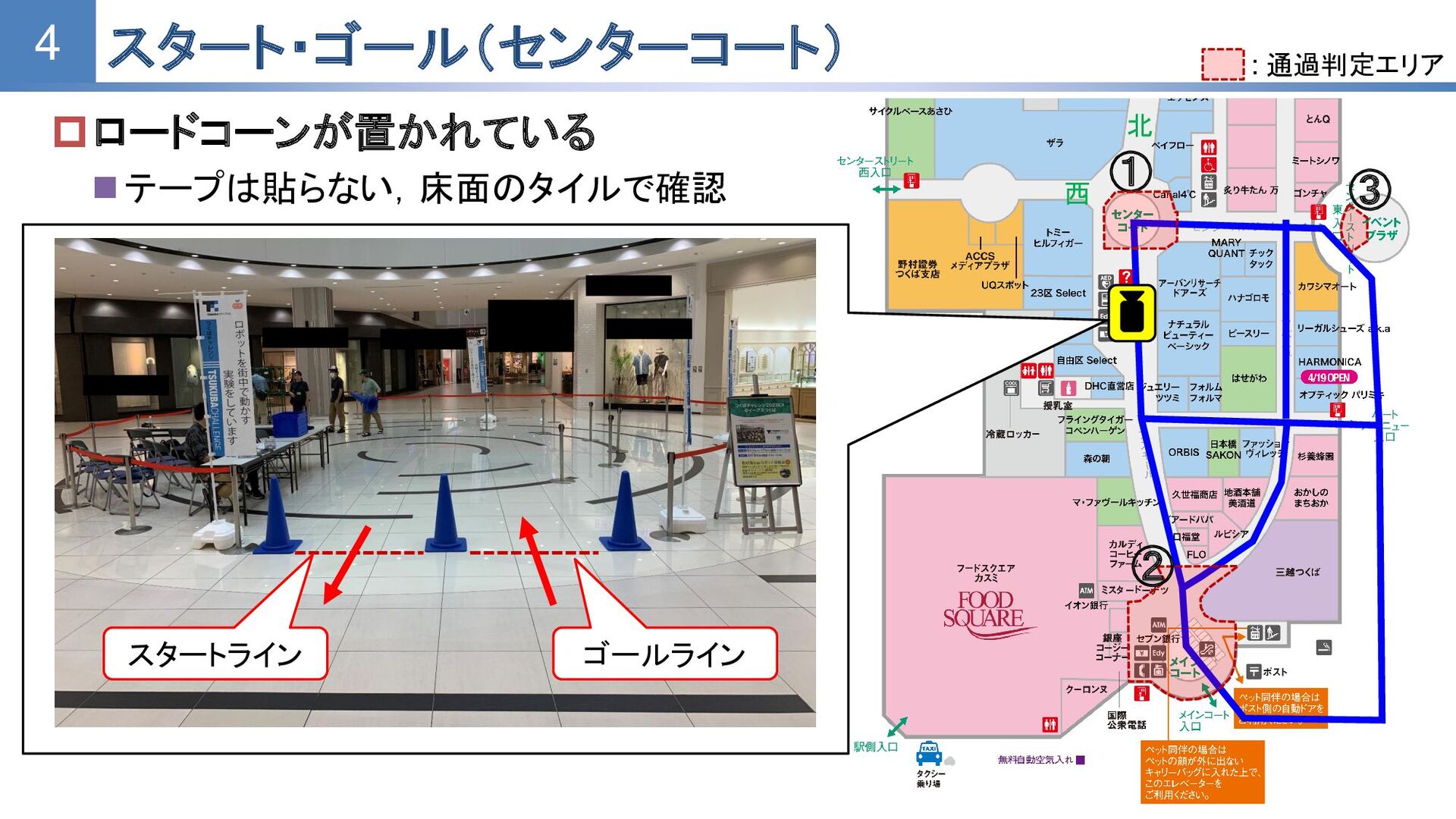
③ ② ① ロードコーンが置かれている ◼ テープは貼らない,床面のタイルで確認 4 スタート・ゴール(センターコート) スタートライン ゴールライン
西 北 : 通過判定エリア
③ ② ① 赤枠のエリアにロボットの一部が入ること ◼ テープは貼らない,床面のタイルで確認 5 ①センターコート通過判定エリア 西 北
: 通過判定エリア
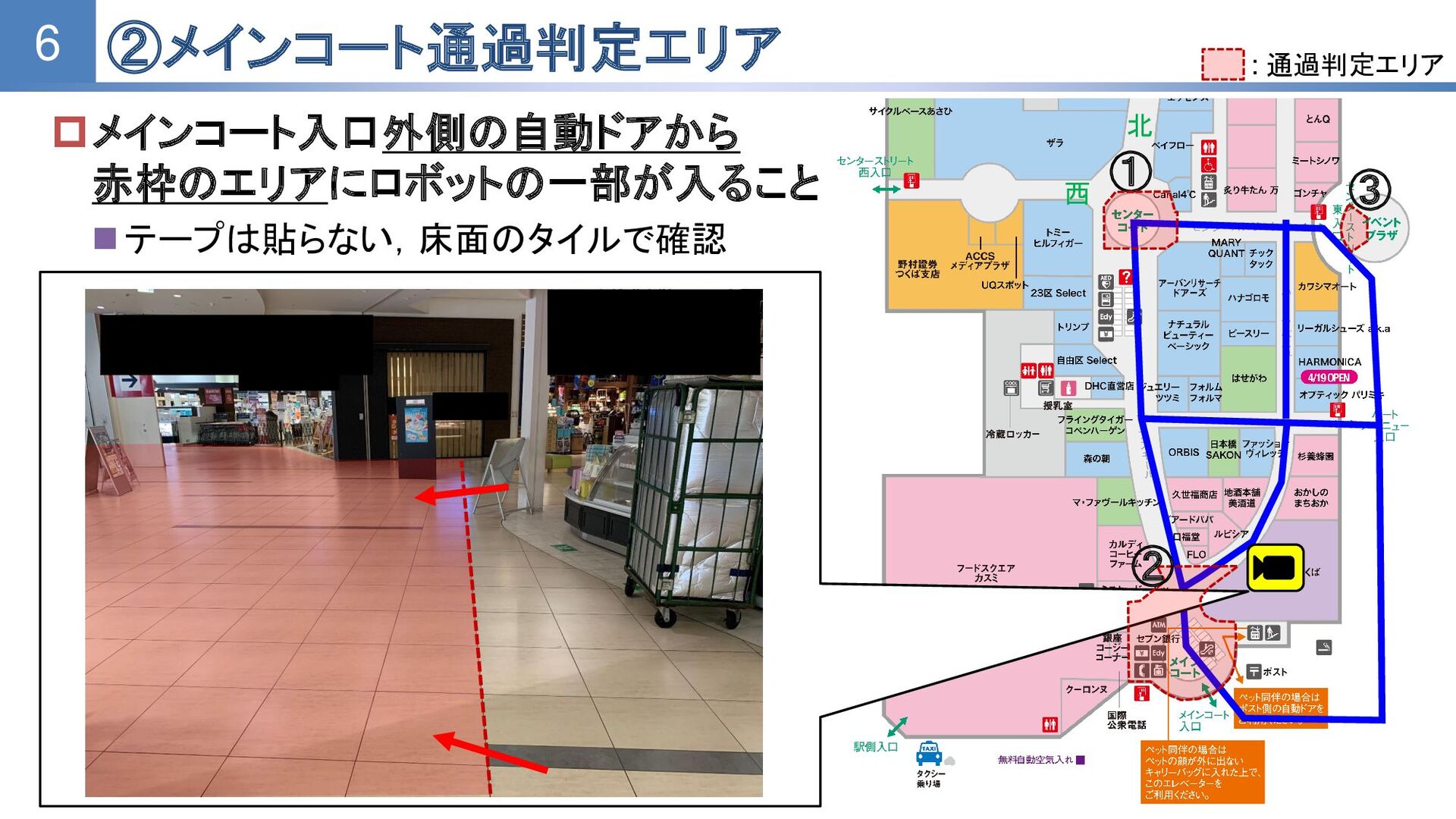
メインコート入口外側の自動ドアから 赤枠のエリアにロボットの一部が入ること ◼ テープは貼らない,床面のタイルで確認 6 ②メインコート通過判定エリア ③ ② ① 西
北 : 通過判定エリア
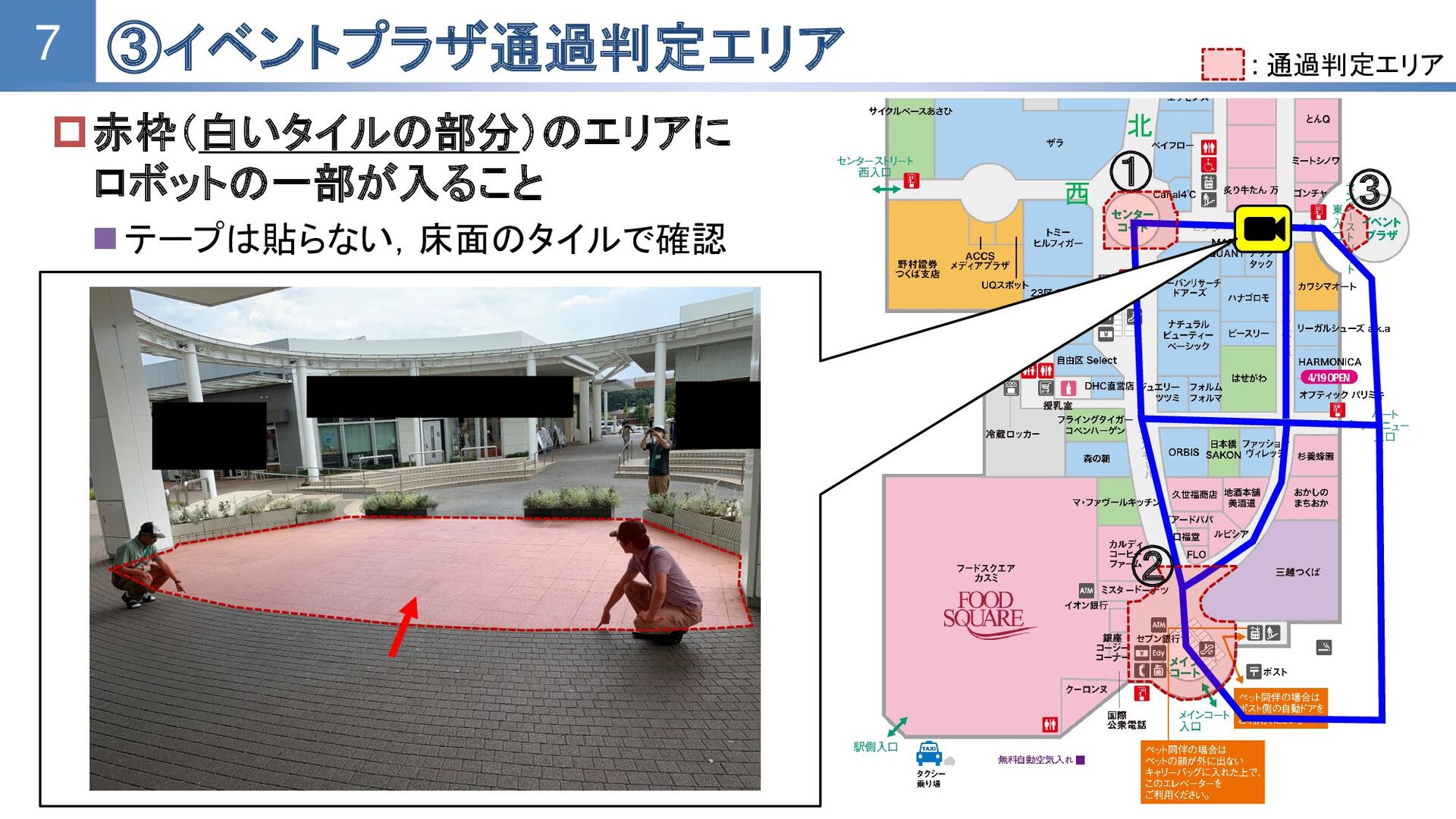
赤枠(白いタイルの部分)のエリアに ロボットの一部が入ること ◼ テープは貼らない,床面のタイルで確認 7 ③イベントプラザ通過判定エリア ③ ② ① 西
北 : 通過判定エリア
マイルストーン ◼ マイルストーン1: 1周 ◼ マイルストーン2: 2周 ◼ マイルストーン3: 3周してゴールに戻る(完走)⇒
認定証 失敗とみなされるケース(基本的につくばチャレンジ本体に準拠する) ◼ オペレータが自律走行の継続が不可能と判断した場合 ◼ ロボットが通行可能な経路を外れて走行した場合 ◼ ロボットが店舗に進入しそうな場合 ※店舗に進入する前に必ず非常停止させること ◼ 他のロボット,歩行者,環境中の物体と衝突しそうな場合 ※衝突する前に必ず非常停止させること ◼ スタートラインを越えたあと、意図的にロボットに触れた場合や操作を加えた場合 ◼ チームメンバーが、障害物を移動させる、意識的に障害物になるなど、 環境を変化させた場合(周囲の人に依頼することも含む) 8 課題達成の評価方法(1/2)
失敗とみなされるケース(続き) ◼ 各種制限時間を超過した場合 ◼ スタートコール後, ◼ 1分間以内にスタートラインを越えること ◼ 60分間以内にゴールすること ◼ロボットが一ヶ所に停滞してしまった場合,
オペレータの判断で非常停止スイッチを押下して,走行失敗とすること ◼ 次項の例外を除き,非常停止スイッチを押下した場合 ◼ 非常用リード紐を引いた場合 非常停止スイッチを押下しても走行失敗と判断しないケース ◼ 第三者に故意に走行を妨害された場合の非常停止は、走行失敗とは判断しない ◼ イベントプラザ横の「東入口」と「メインコート入口」の自動ドアに限り, 人が多い時には安全のために,オペレータが非常停止を押下して一時停止し, オペレータによる解除での走行再開を認める 9 課題達成の評価方法(2/2)
10 本走行のスケジュール 時間 内容 10:00 開館 10:00~ チーム入館 受付(本部・メンバー全員) ⇒
入館証・PRESS証配付 10:00~12:30 全体ミーティングは実施しない ロボットの準備が出来たら受付 ⇒ 安全チェック 実験走行 11:00~12:30 子供向けイベント(30分×3回)[筑波大小型移動ロボットの操作体験] 13:00~15:00 開会式,本走行(実験走行継続可) 15:00~ 閉会式,集合写真撮影 15:30頃~17:00 片づけ,撤収,入館証・PRESS証回収
出走順は本走行前日に発表する 出走時刻より前にスタートに並ぶこと ◼ 随行委員から本走行チェックシートを受け取り,記入して,随行委員に渡す ◼ オペレータは「本走行実施中」の黄色たすきを受け取り着用する スタート地点から1台ずつ,2分間隔でスタートする ◼ 随行委員が足りない場合は,待ってもらう可能性あり 走行失敗後の実験走行
◼ 最後の1台が出走後,15:00まで実験走行を実施してもよい ◼ 失敗時に随行委員に「本走行実施中」のたすきを返却する ◼ ゴール周辺には近づかないこと ◼ 待機調整エリアに戻る場合には,外周を囲むパーティションポールのベルトを外して入ること ◼ センターコートの西側と北側は通行禁止であるが, 本走行終了~15:00までは待機調整エリアに戻る場合に限り,一時的に通過してもよいこととする ◼ ただし,ベルトで囲んだ円の外周から大きく外れて通行しないこと 11 本走行の出走手順
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}