Rearrangement Ankit Goyal1,2, Arsalan Mousavian1, Chris Paxton1, Yu-Wei Chao1, Brian Okorn1,3, Jia Deng2, Dieter Fox1 (1NVIDIA, 2Princeton University, 3Carnegie Mellon University) CVPR 2022 慶應義塾大学 杉浦孔明研究室 是方諒介 Goyal, A., Mousavian, A., Paxton, C., Chao, Y., Okorn, B., Deng, J., Fox, D. "IFOR: Iterative Flow Minimization for Robotic Object Rearrangement." CVPR 2022.
{kind=link}
{kind=link}
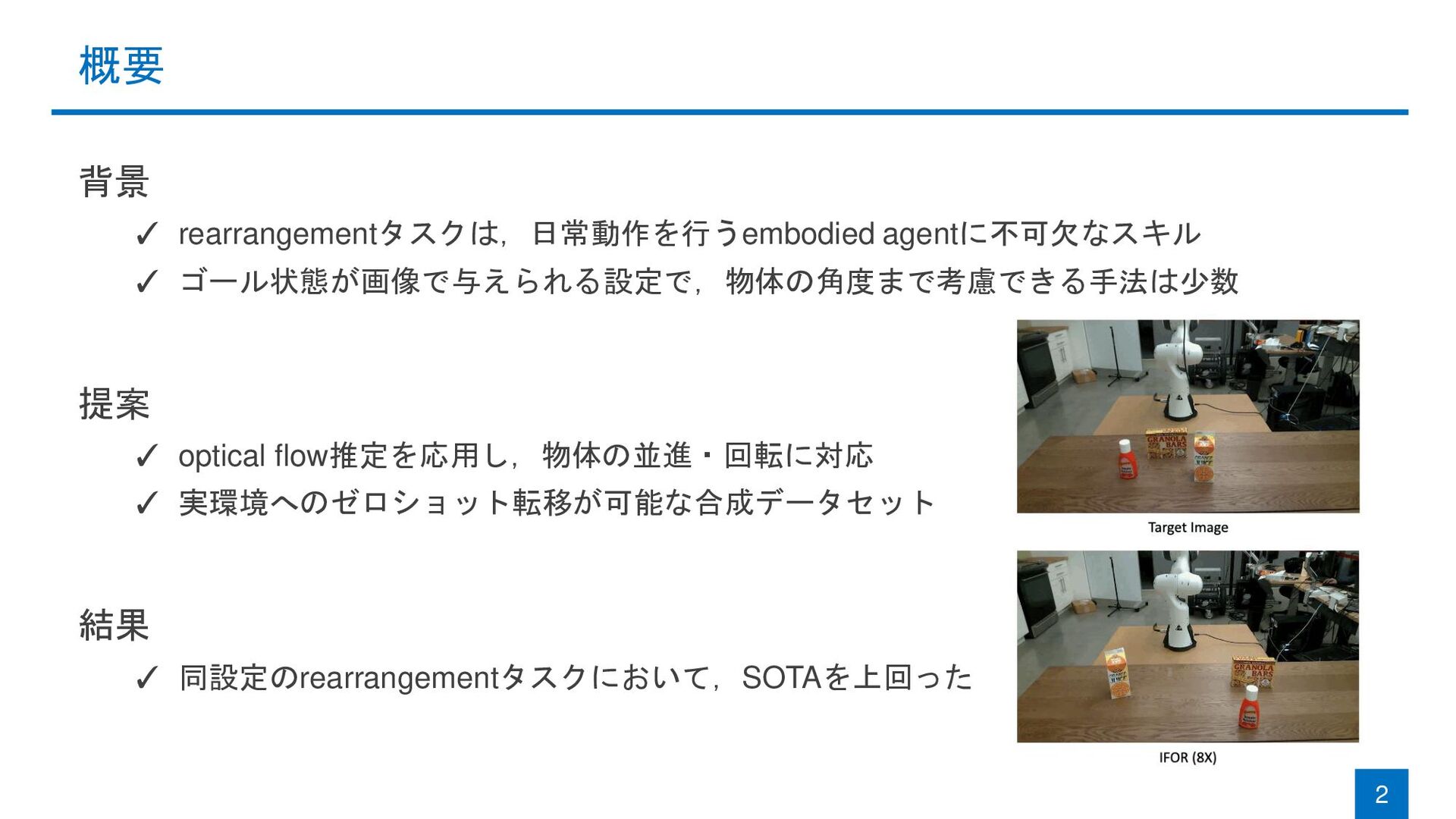
![背景:rearrangementタスクは生活支援ロボットに不可欠なスキル ◼ object rearrangement [Batra+, 20] ◼ 現在の状態から望ましいゴール状態へ変化させる物体操作 ◼ 例:食卓を整える,机上を片付ける等](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_2.jpg){kind=link}
![関連研究:ゴール状態の与え方を多様に定義 4 手法 概要 NeRP [Qureshi+, RSS21] ・ゴール状態:RGB-D画像 → 本研究と同様](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_3.jpg){kind=link}
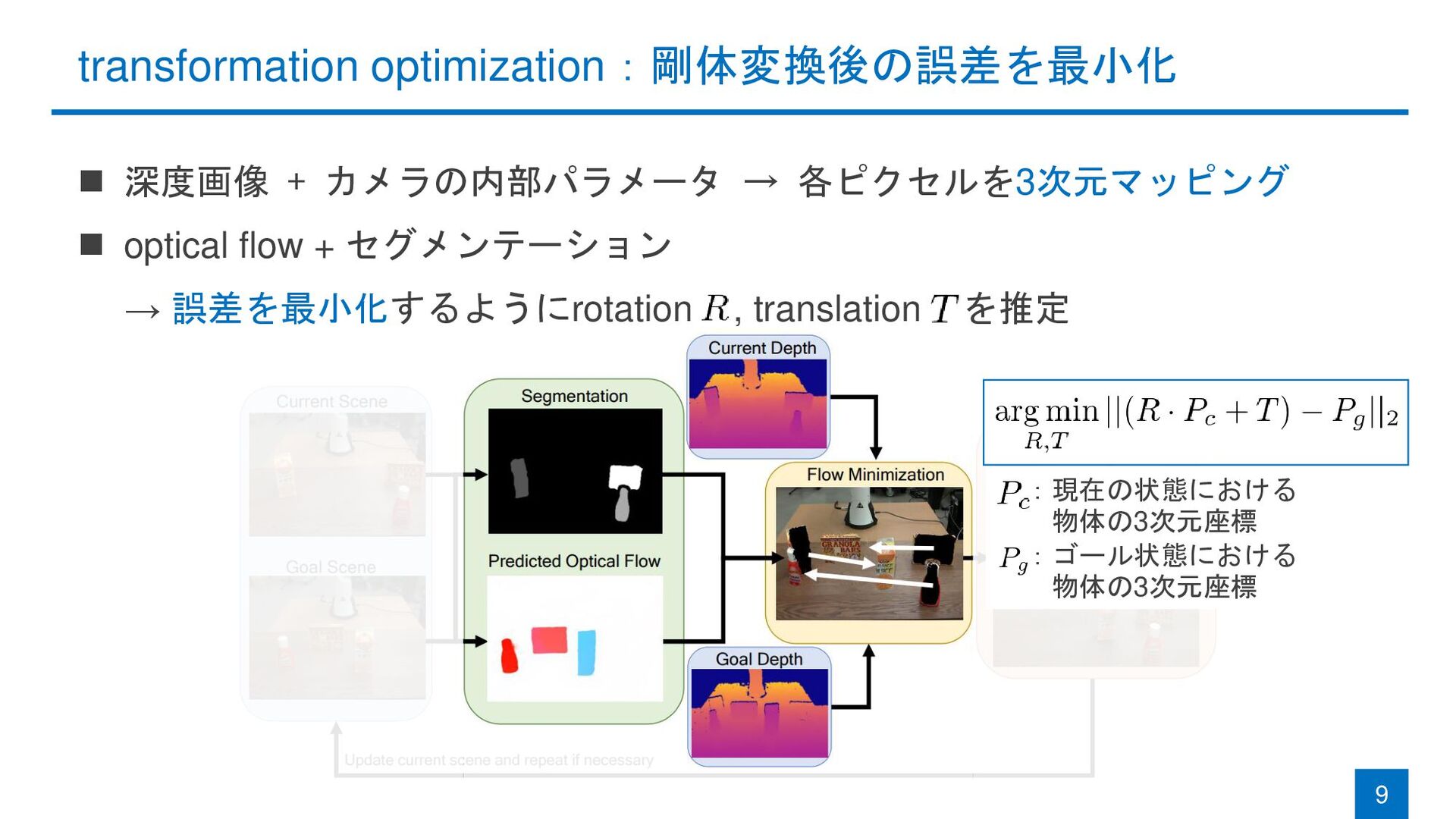
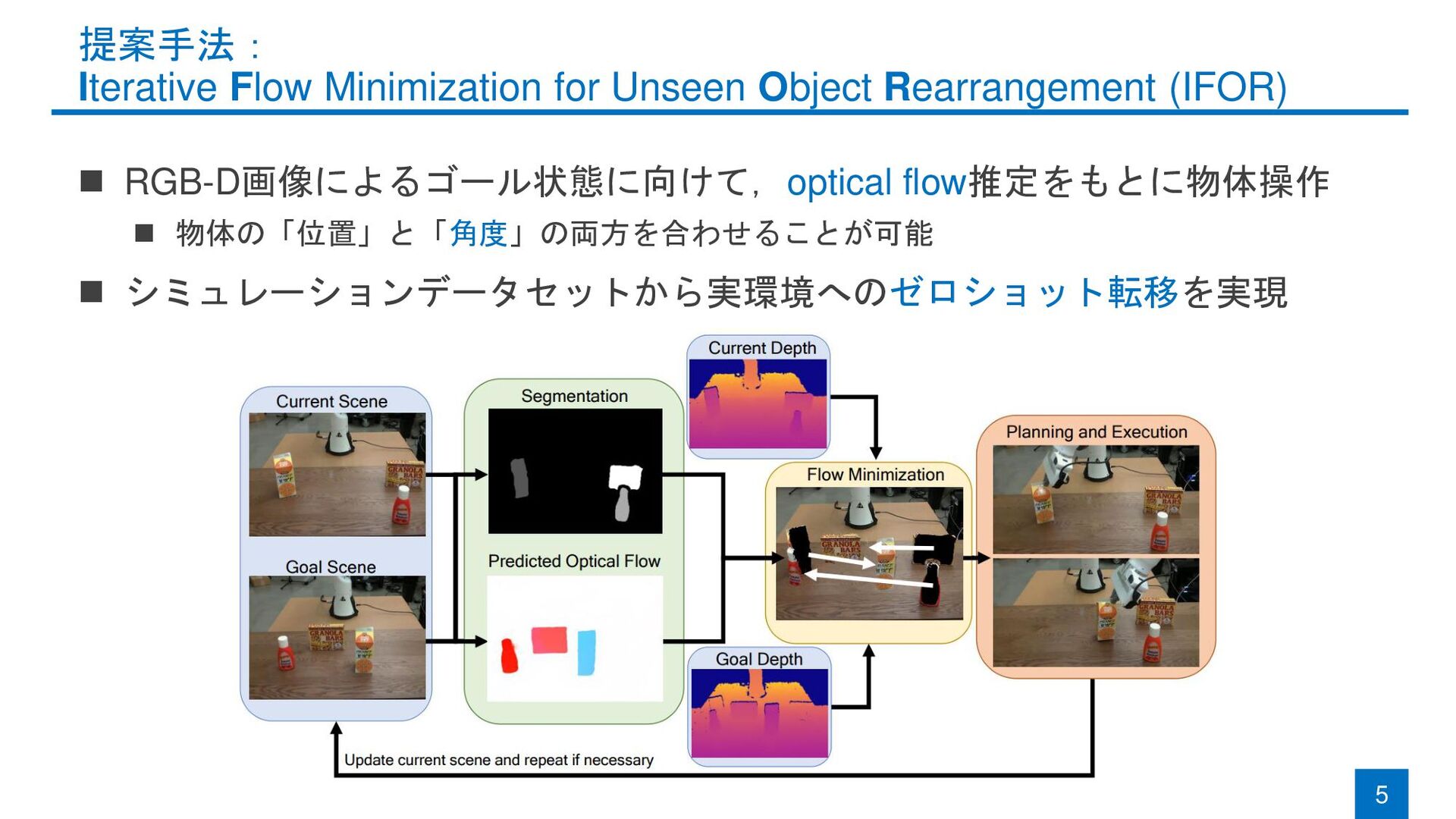{kind=link}
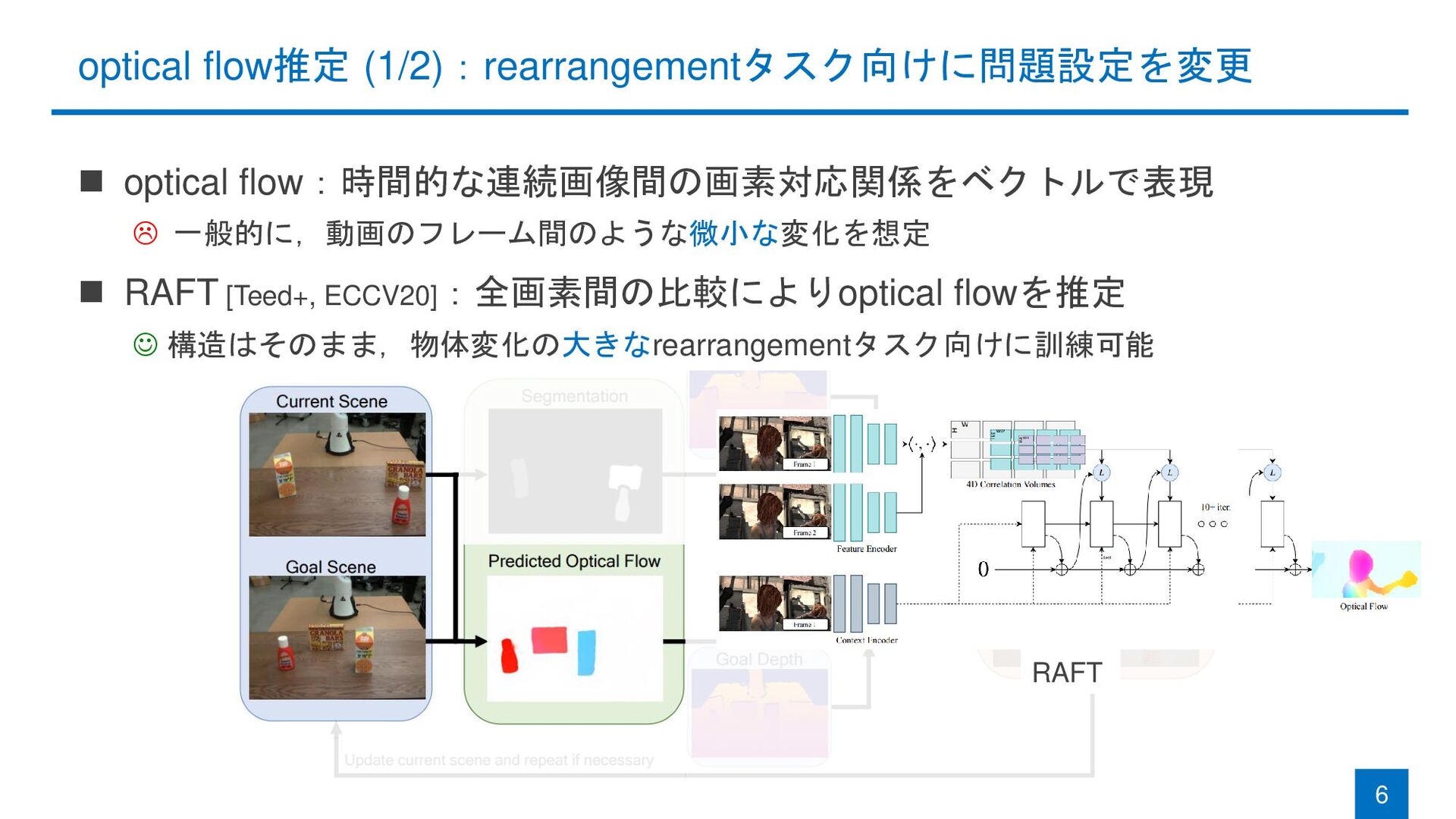{kind=link}
![optical flow推定 (2/2):合成データセットを用いてRAFTを訓練 ◼ photo-realisticなレンダラ:NViSII [Morrical+, 21] ◼ 光源,背景,支持物体のテクスチャ、カメラ視点等を無作為に変更 ◼](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_6.jpg){kind=link}
![未知物体のセグメンテーション:「物体らしさ」の情報を獲得 ◼ UCN [Xiang+, CoRL20]:RGB-D画像を入力とするセグメンテーション手法 ◼ 同物体のピクセルに対して似た埋め込み表現を与え,インスタンスをクラスタリング ◼ 目的:optical flowに欠ける物体形状に関する情報を補足](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_7.jpg){kind=link}
{kind=link}
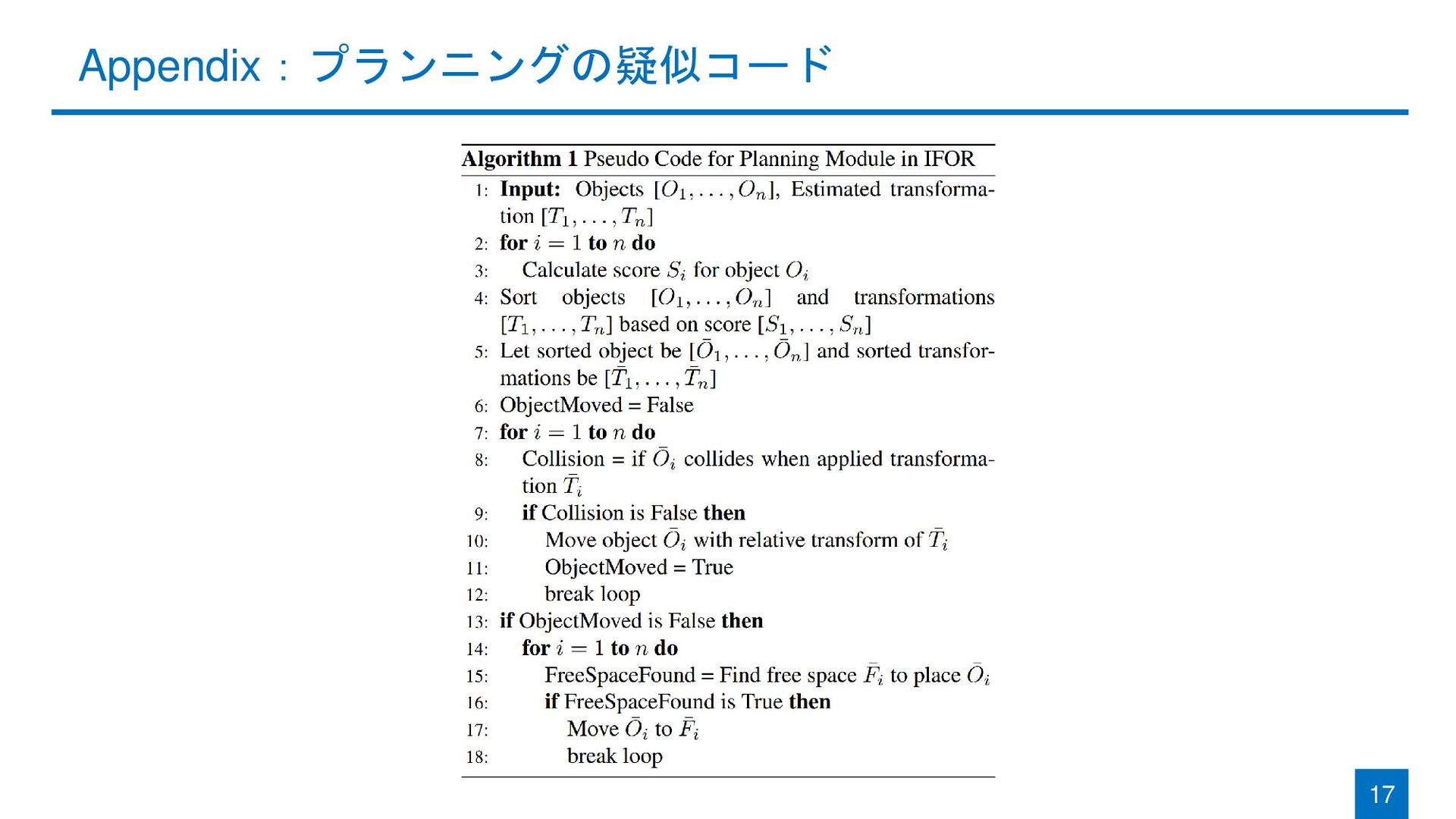
![プランニング:pick-and-placeタスクの実行 ◼ 衝突しない物体のうち,変換が大きい(= スコア が高い)ものから実行 ◼ 衝突予測:SceneCollisionNet [Danielczuk+, ICRA20] ◼](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_9.jpg){kind=link}
![実験設定:実機・シミュレーションの両環境で評価 ① 実機:SOTAであるNeRP [Qureshi+, RSS21] と比較 ◼ 2-5個の未知物体を含む6シーンを使用 ◼ ロボット:Franka](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_10.jpg){kind=link}
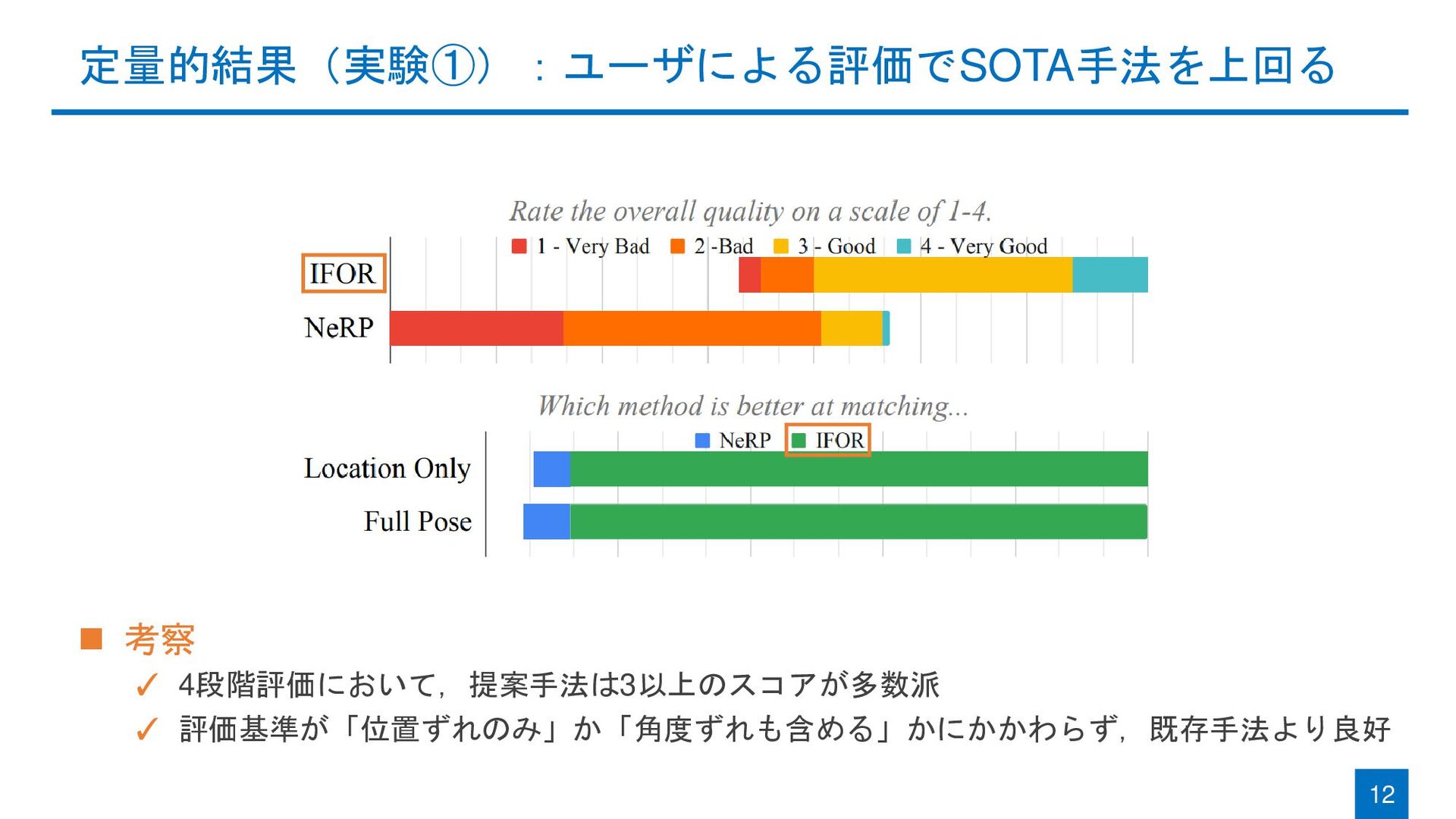{kind=link}
{kind=link}
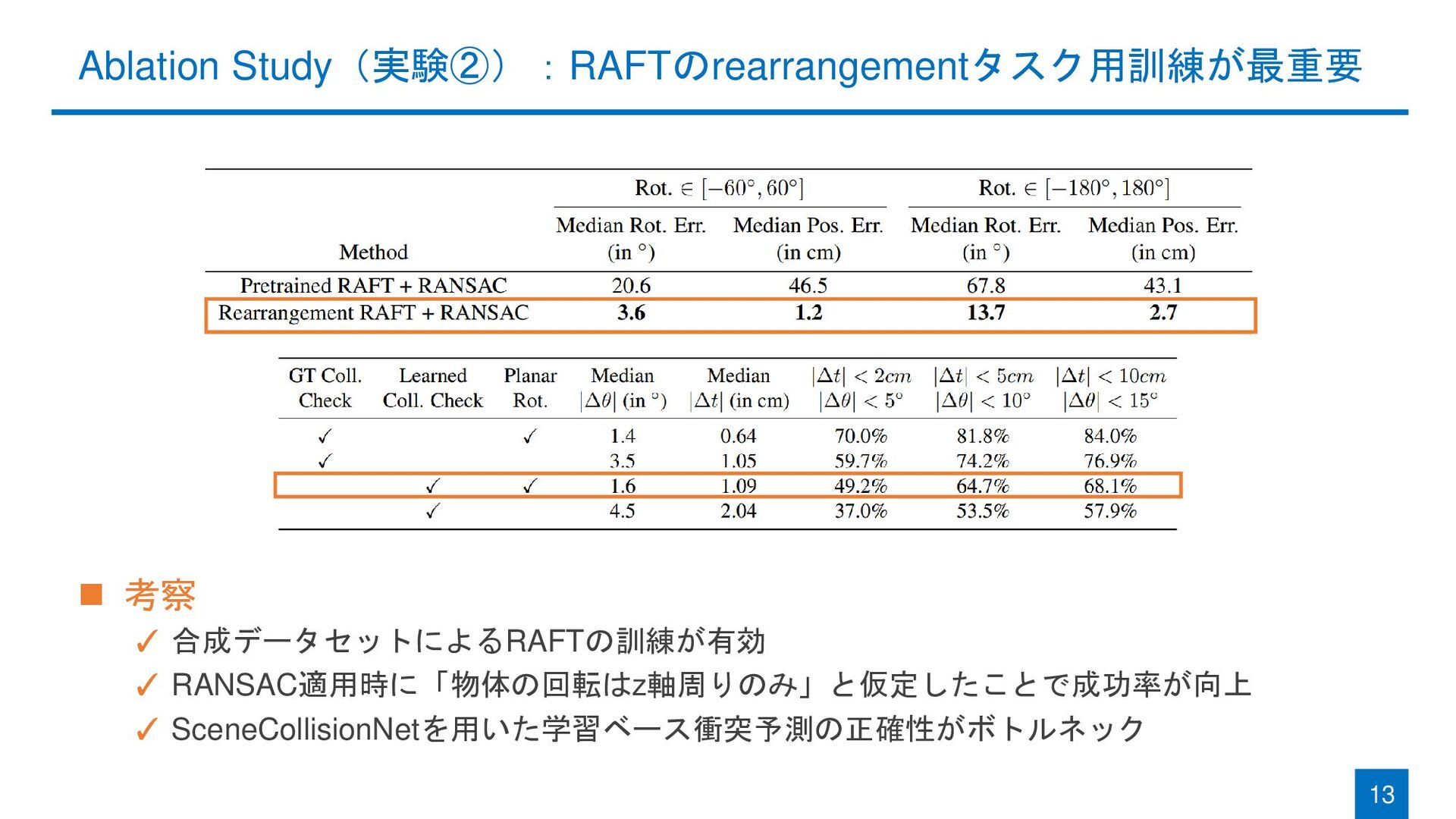
{kind=link}
{kind=link}
![Appendix:RANSAC [Fischler+, ACM81] ◼ 外れ値の影響を抑制 ◼ 大幅に誤った対応点を予測したケース(= 多数存在)に対処 16 変換例](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}