Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperboli...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
May 27, 2026
Technology
86
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
Semantic Machine Intelligence Lab., Keio Univ.
PRO
May 27, 2026
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
85
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
99
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
[Journal club] Improved Mean Flows: On the Challenges of Fastforward Generative Models
keio_smilab
PRO
0
210
Other Decks in Technology
See All in Technology
プロダクト開発組織の現在地(Ver.2026/07) / product-organization
kaonavi
0
460
20260720_クラウド女子会×PyLadiesTokyoコラボ Amazon Bedrock ハンズオン用資料
yuuka51
2
120
書籍セキュアAPIについて
riiimparm
0
310
そのドキュメント、自動化しませんか?
yuksew
1
430
AI x 開発生産性を取り巻く予算戦略と投資対効果
i35_267
7
3.2k
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
320
AI_Dev_Day_製造業領域でのAI活用から見た活用の罠と成功に導く実践知.pdf
kintotechdev
0
190
GoでCコンパイラを作った話
repunit
0
160
OpenTelemetryにおけるGoのゼロコード・コンパイル時計装について #fukuokago
quiver
0
280
文字起こし基盤の信頼性
abnoumaru
0
130
AI工学特論: MLOps・継続的評価
asei
8
1.9k
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
Featured
See All Featured
30 Presentation Tips
portentint
PRO
1
350
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Discover your Explorer Soul
emna__ayadi
2
1.2k
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
190
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
2k
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
470
Ecommerce SEO: The Keys for Success Now & Beyond - #SERPConf2024
aleyda
1
2.1k
How GitHub (no longer) Works
holman
316
150k
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
310
Darren the Foodie - Storyboard
khoart
PRO
3
3.5k
GraphQLとの向き合い方2022年版
quramy
50
15k
Designing Experiences People Love
moore
143
24k
Transcript
PHyCLIP: 𝒍𝟏 -Product of Hyperbolic Factors Unifies Hierarchy and Compositionality
in Vision- Language Representation Learning ICLR26 慶應義塾大学 杉浦孔明研究室 高科明哲 Daiki Yoshikawa1, Takashi Matsubara1, 2 1Hokkaido University, 2CyberAgent Daiki Yoshikawa, et al. PHyCLIP: 𝒍𝟏 -Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning. ICLR2026.
2 PHyCLIP: 階層性と構成性を考慮した双曲空間への埋め込み ⚫ 背景 ⚫ VLM は 階層性 (hierarchy)
と 構成性 (compositionality) の両方を扱う ⚫ CLIP [Radford+, ICML21] は単一ユークリッド空間への埋め込み → hierarchy と compositionality を同時に表現することが難しい ⚫ 双曲空間は hierarchy の表現に適する一方, compositionality を表現しにくい ⚫ 提案手法: PHyCLIP ⚫ 複数の hyperbolic factor の 𝑙1 -product 空間への埋め込み ⚫ 複数 factor の同時活性化により compositionality を表現 ⚫ 結果 ⚫ zero-shot の classification / retrieval で既存手法を上回る ⚫ hierarchy の表現や compositionality の理解が改善 概要 • • • •
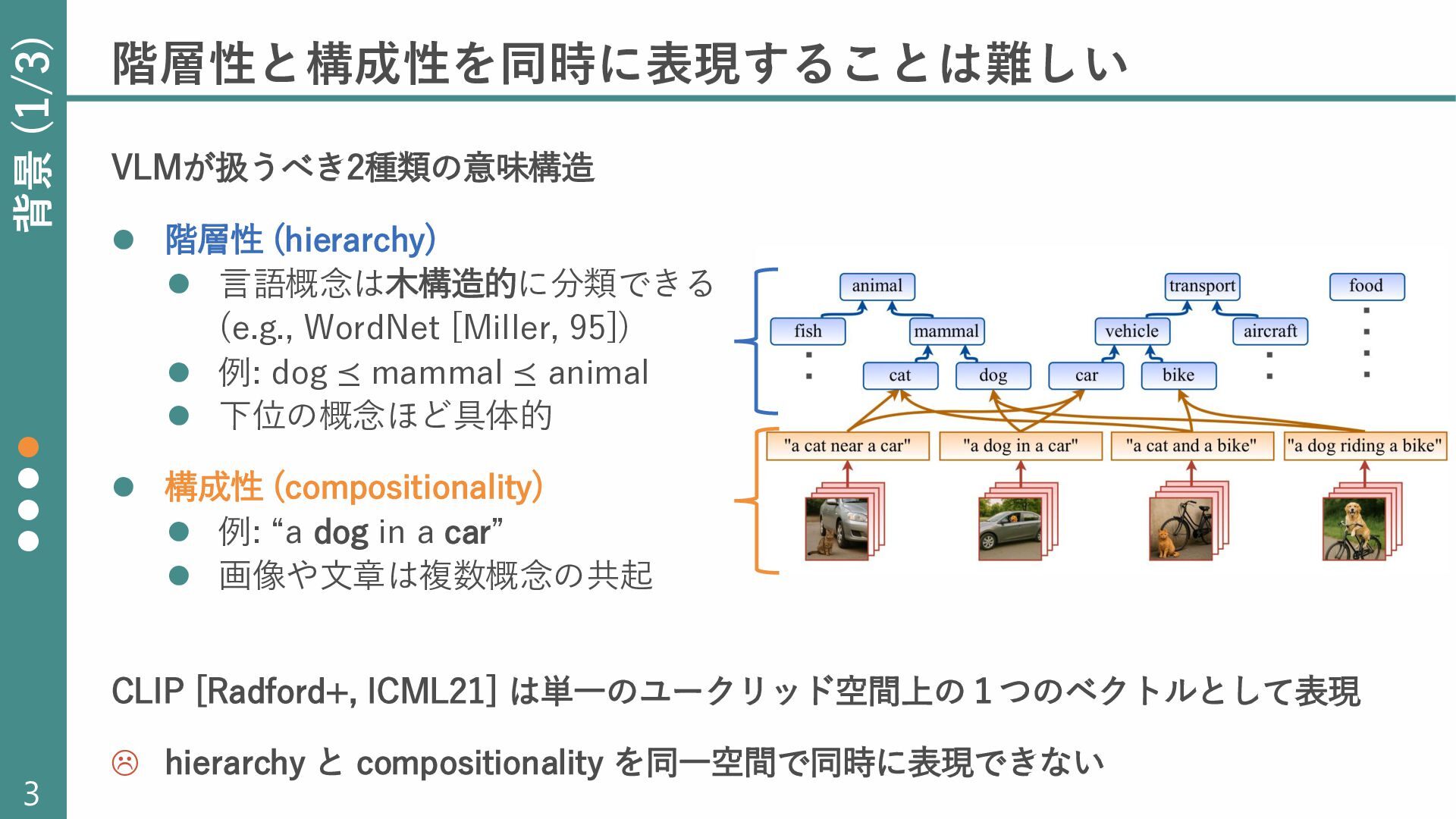
3 階層性と構成性を同時に表現することは難しい VLMが扱うべき2種類の意味構造 ⚫ 階層性 (hierarchy) ⚫ 言語概念は木構造的に分類できる (e.g., WordNet
[Miller, 95]) ⚫ 例: dog ⪯ mammal ⪯ animal ⚫ 下位の概念ほど具体的 ⚫ 構成性 (compositionality) ⚫ 例: “a dog in a car” ⚫ 画像や文章は複数概念の共起 CLIP [Radford+, ICML21] は単一のユークリッド空間上の1つのベクトルとして表現 hierarchy と compositionality を同一空間で同時に表現できない 背景 (1/3) • • • •
4 双曲空間は hierarchy を自然に表現できる Poincaré Embeddings [Nickel+, NeurIPS17] ⚫ 背景
⚫ 単語・グラフには潜在的な hierarchy が存在 ⚫ 低次元のユークリッド空間では深い階層構造を 表せない (∵ ℝ𝑑: 多項式的 階層構造: 指数関数的) ⚫ 提案: ポアンカレモデルへの埋め込み ⚫ 双曲空間では空間が指数関数的に広がる → 連続的な木構造として階層構造を自然に表現 ⚫ ノルム 𝒙 が階層, 距離 𝑑 𝒖, 𝒗 が類似度を表す ⚫ 結果 ⚫ WordNet [Miller, 95] のような大規模分類体系の埋め込み ☺ 表現容量・汎化性能ともに従来手法を凌駕 ☺ 特に低次元でも高い精度を維持 背景 (2/3) • • • • WordNet の哺乳類 subtree を双曲空間 (𝑑 = 2) で訓練
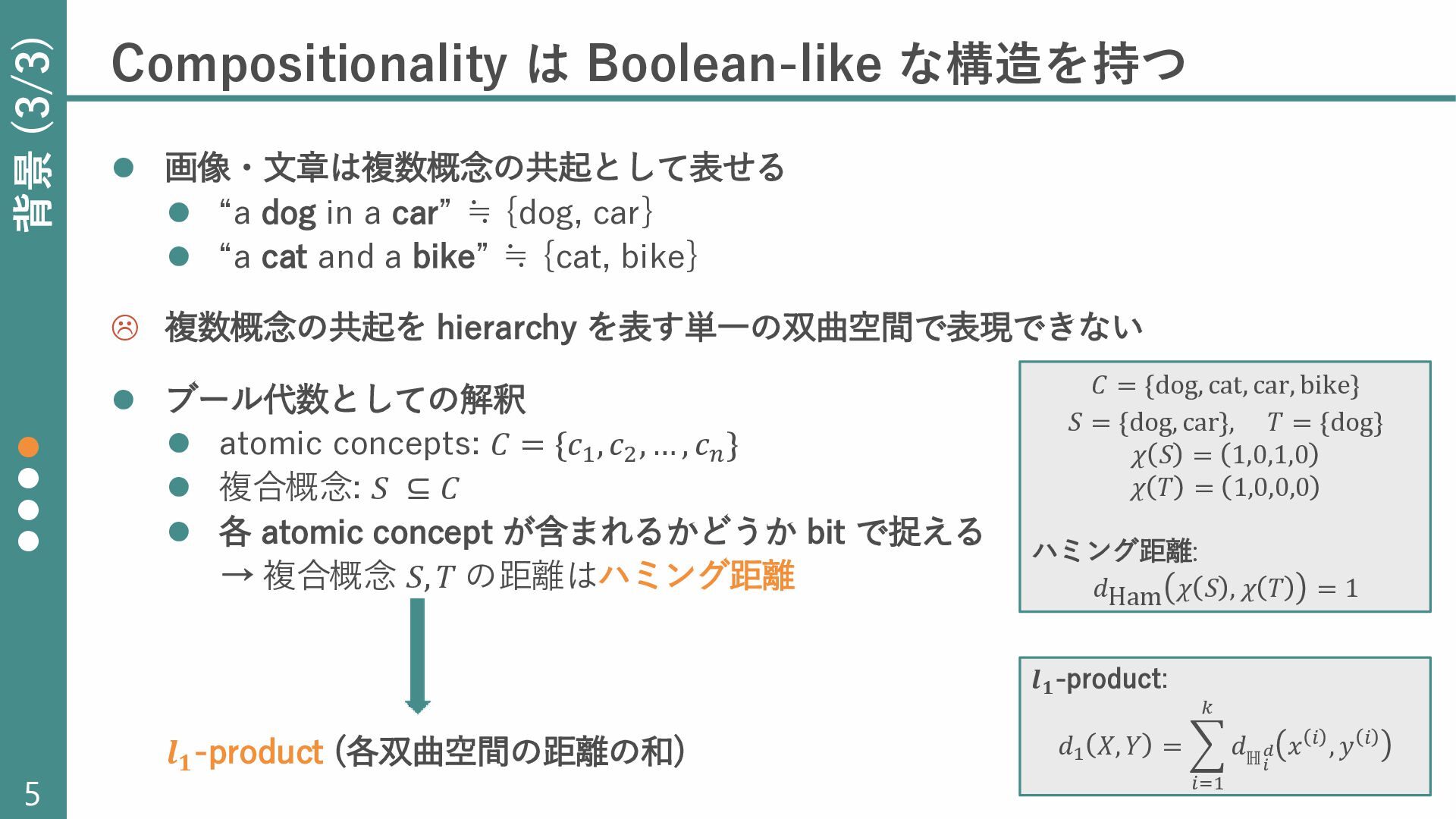
5 ⚫ 画像・文章は複数概念の共起として表せる ⚫ “a dog in a car” ≒
{dog, car} ⚫ “a cat and a bike” ≒ {cat, bike} 複数概念の共起を hierarchy を表す単一の双曲空間で表現できない ⚫ ブール代数としての解釈 ⚫ atomic concepts: 𝐶 = {𝑐1 , 𝑐2 , … , 𝑐𝑛 } ⚫ 複合概念: 𝑆 ⊆ 𝐶 ⚫ 各 atomic concept が含まれるかどうか bit で捉える → 複合概念 𝑆, 𝑇 の距離はハミング距離 𝒍𝟏 -product (各双曲空間の距離の和) Compositionality は Boolean-like な構造を持つ 背景 (3/3) • • • • 𝐶 = {dog, cat, car, bike} 𝑆 = {dog, car}, 𝑇 = {dog} 𝜒 𝑆 = 1,0,1,0 𝜒 𝑇 = 1,0,0,0 ハミング距離: 𝑑Ham 𝜒 𝑆 , 𝜒 𝑇 = 1 𝒍𝟏 -product: 𝑑1 𝑋, 𝑌 = 𝑖=1 𝑘 𝑑 ℍ𝑖 𝑑 𝑥 𝑖 , 𝑦 𝑖
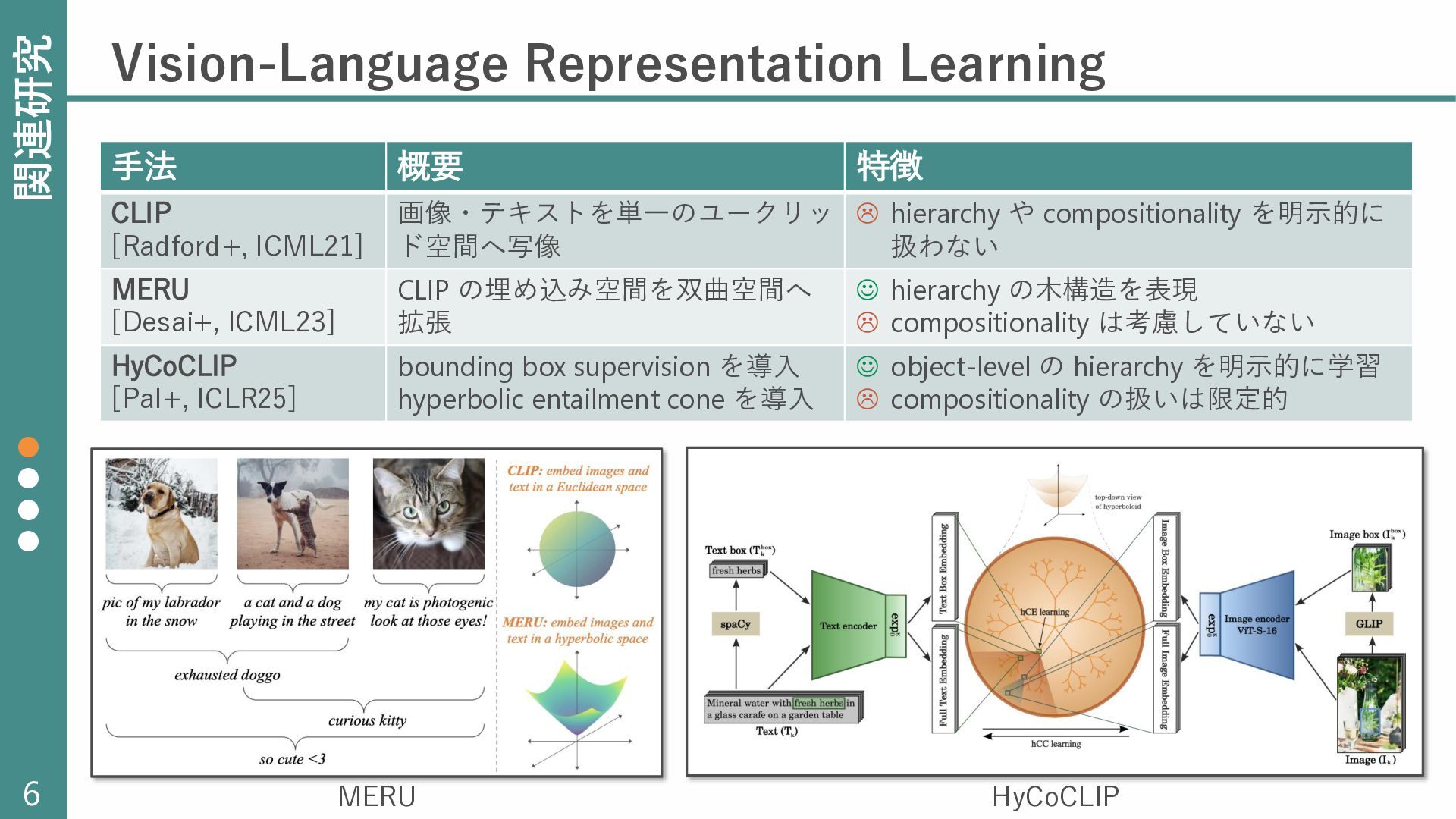
6 Vision-Language Representation Learning • • • • 手法 概要
特徴 CLIP [Radford+, ICML21] 画像・テキストを単一のユークリッ ド空間へ写像 hierarchy や compositionality を明示的に 扱わない MERU [Desai+, ICML23] CLIP の埋め込み空間を双曲空間へ 拡張 ☺ hierarchy の木構造を表現 compositionality は考慮していない HyCoCLIP [Pal+, ICLR25] bounding box supervision を導入 hyperbolic entailment cone を導入 ☺ object-level の hierarchy を明示的に学習 compositionality の扱いは限定的 関連研究 MERU HyCoCLIP
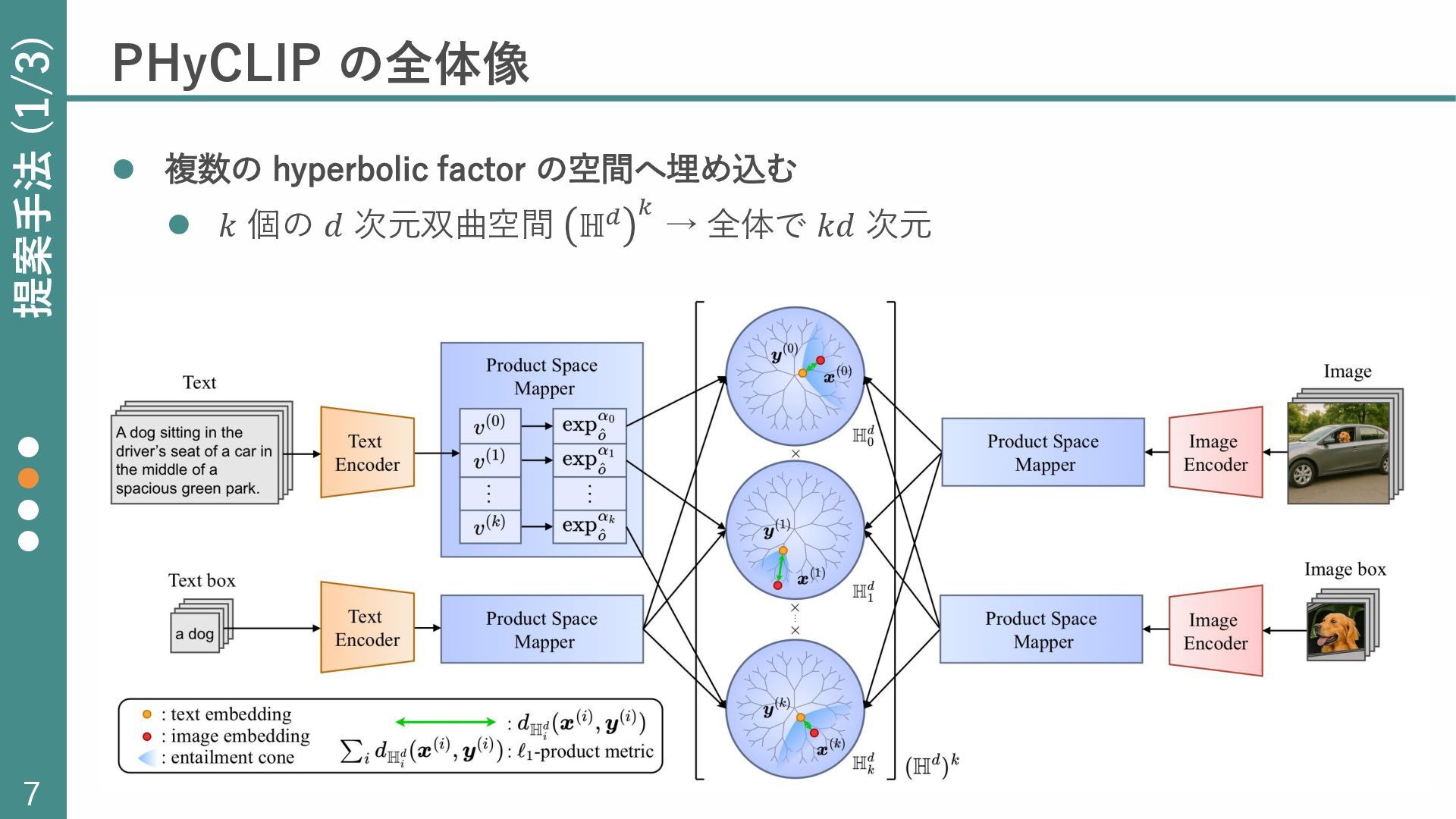
7 PHyCLIP の全体像 ⚫ 複数の hyperbolic factor の空間へ埋め込む ⚫ 𝑘
個の 𝑑 次元双曲空間 ℍ𝑑 𝑘 → 全体で 𝑘𝑑 次元 提案手法 (1/3) • • • •
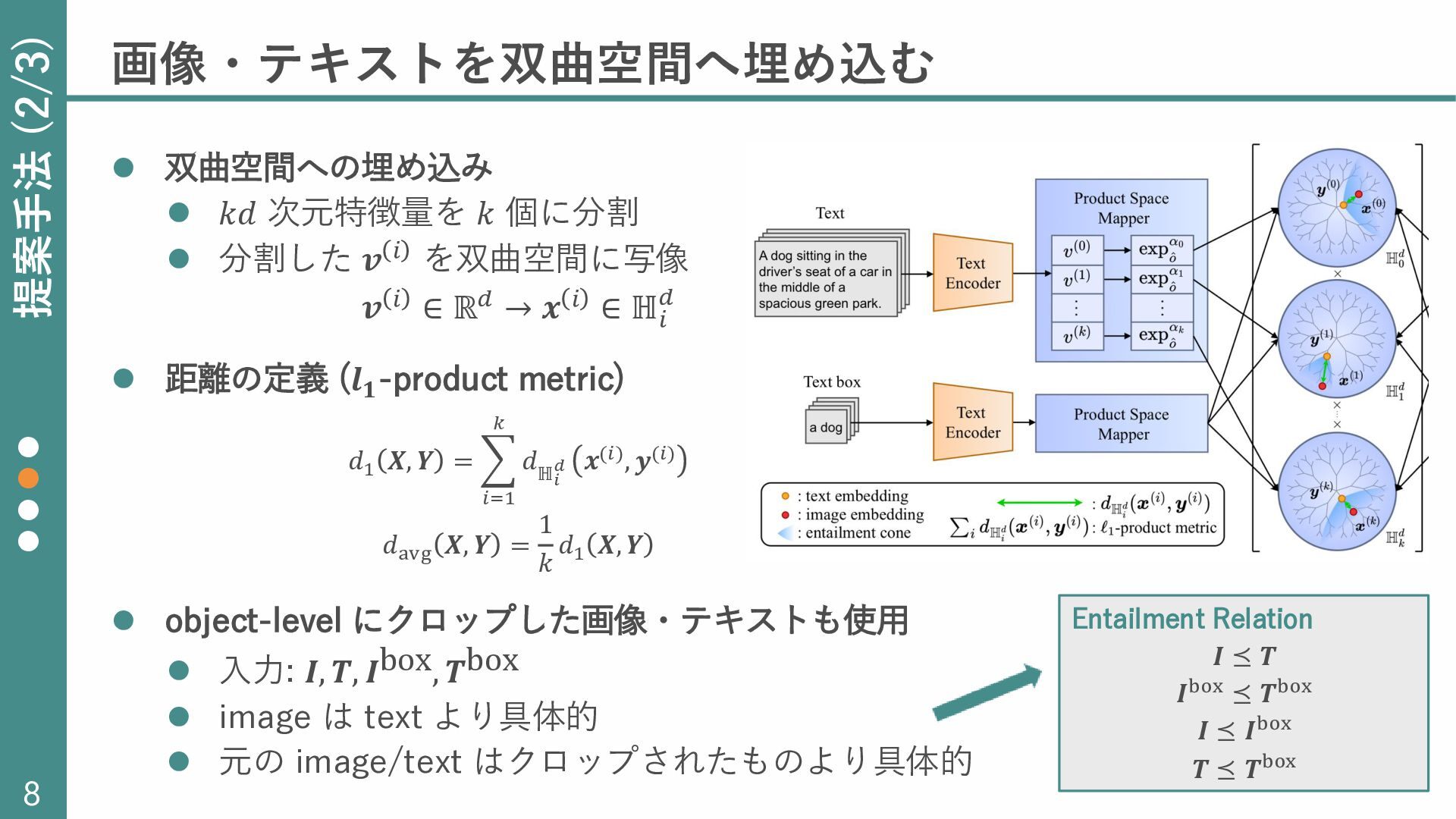
8 画像・テキストを双曲空間へ埋め込む ⚫ 双曲空間への埋め込み ⚫ 𝑘𝑑 次元特徴量を 𝑘 個に分割 ⚫
分割した 𝒗 𝑖 を双曲空間に写像 𝒗 𝑖 ∈ ℝ𝑑 → 𝒙 𝑖 ∈ ℍ𝑖 𝑑 ⚫ 距離の定義 (𝒍𝟏 -product metric) 𝑑1 𝑿, 𝒀 = 𝑖=1 𝑘 𝑑 ℍ𝑖 𝑑 𝒙(𝑖), 𝒚(𝑖) 𝑑avg 𝑿, 𝒀 = 1 𝑘 𝑑1 𝑿, 𝒀 ⚫ object-level にクロップした画像・テキストも使用 ⚫ 入力: 𝑰, 𝑻, 𝑰box, 𝑻box ⚫ image は text より具体的 ⚫ 元の image/text はクロップされたものより具体的 提案手法 (2/3) • • • • Entailment Relation 𝑰 ⪯ 𝑻 𝑰box ⪯ 𝑻box 𝑰 ⪯ 𝑰box 𝑻 ⪯ 𝑻box
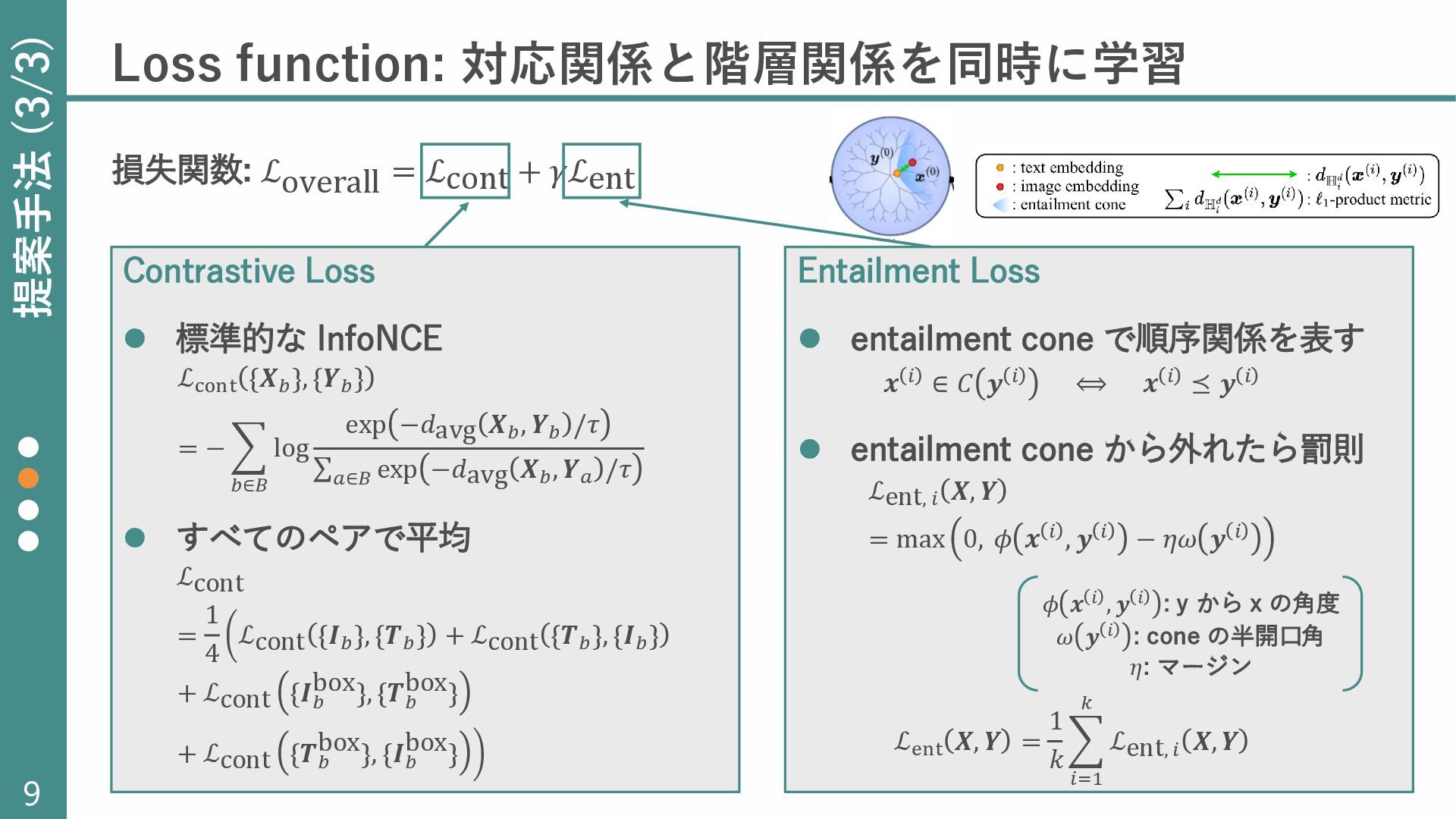
9 Loss function: 対応関係と階層関係を同時に学習 損失関数: ℒoverall = ℒcont + 𝛾ℒent
提案手法 (3/3) • • • • Contrastive Loss ⚫ 標準的な InfoNCE ℒcont {𝑿𝑏 }, {𝒀𝑏 } = − 𝑏∈𝐵 log exp −𝑑avg 𝑿𝑏 , 𝒀𝑏 /𝜏 σ 𝑎∈𝐵 exp −𝑑avg 𝑿𝑏 , 𝒀𝑎 /𝜏 ⚫ すべてのペアで平均 ℒcont = 1 4 ൬ ൰ ℒcont {𝑰𝑏 }, {𝑻𝑏 } + ℒcont {𝑻𝑏 }, {𝑰𝑏 } + ℒcont {𝑰𝑏 box}, {𝑻𝑏 box} + ℒcont {𝑻𝑏 box}, {𝑰𝑏 box} Entailment Loss ⚫ entailment cone で順序関係を表す 𝒙 𝑖 ∈ 𝐶 𝒚 𝑖 ⟺ 𝒙 𝑖 ⪯ 𝒚 𝑖 ⚫ entailment cone から外れたら罰則 ℒent, 𝑖 𝑿, 𝒀 = max 0, 𝜙 𝒙 𝑖 , 𝒚 𝑖 − 𝜂𝜔 𝒚 𝑖 ℒent 𝑿, 𝒀 = 1 𝑘 𝑖=1 𝑘 ℒent, 𝑖 𝑿, 𝒀 𝜙 𝒙 𝑖 , 𝒚 𝑖 : y から x の角度 𝜔 𝒚 𝑖 : cone の半開口角 𝜂: マージン
10 GRIT を用いた学習 ⚫ 訓練データセット ⚫ GRIT [Peng+, ICCV23]: 自動アノテーションされた
image-text ペア + bbox ⚫ 14.0M image-text pairs / 26.6M box annotations ⚫ PHyCLIP の設定 ⚫ 𝑘 = 64, 𝑑 = 8 (合計: 512次元) ⚫ 𝛾 = 0.2 ⚫ optimizer: AdamW ⚫ 実験環境 ⚫ GPU: A100 ×4 ⚫ iterations: 500,000 ⚫ batch size: 768 実験設定 • • • •
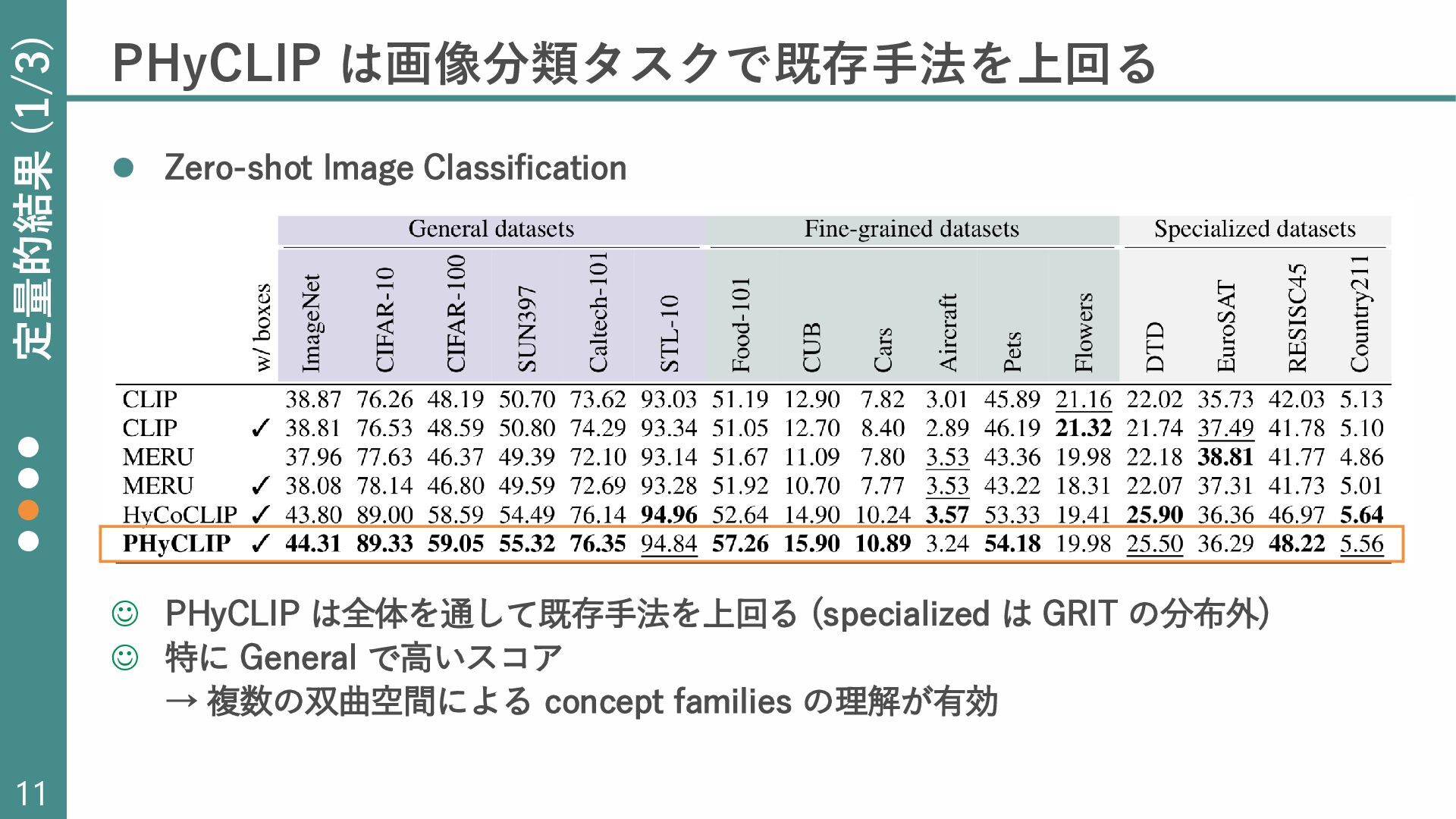
11 ⚫ Zero-shot Image Classification ☺ PHyCLIP は全体を通して既存手法を上回る (specialized は
GRIT の分布外) ☺ 特に General で高いスコア → 複数の双曲空間による concept families の理解が有効 PHyCLIP は画像分類タスクで既存手法を上回る 定量的結果 (1/3) • • • •
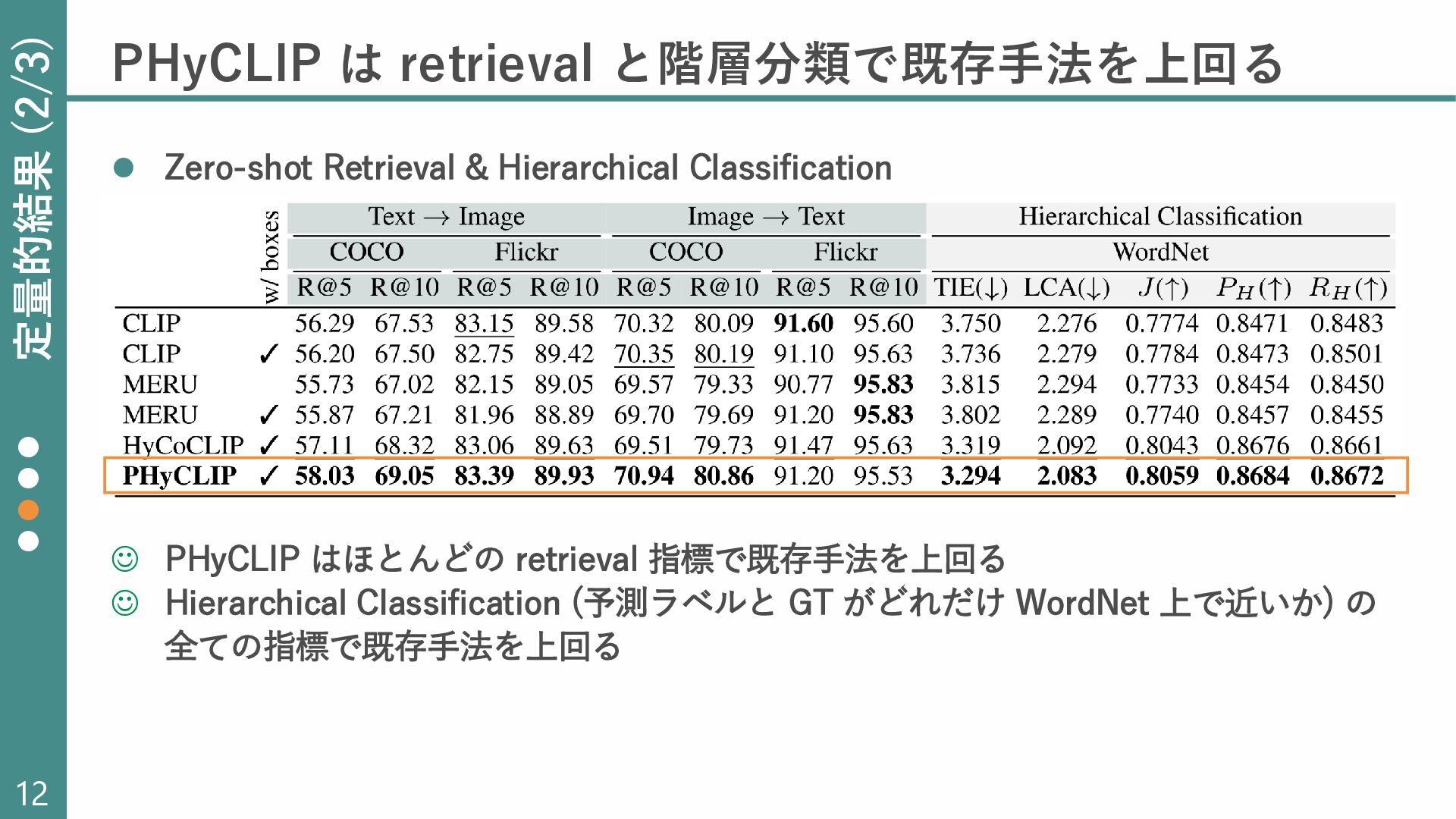
12 PHyCLIP は retrieval と階層分類で既存手法を上回る ⚫ Zero-shot Retrieval & Hierarchical
Classification ☺ PHyCLIP はほとんどの retrieval 指標で既存手法を上回る ☺ Hierarchical Classification (予測ラベルと GT がどれだけ WordNet 上で近いか) の 全ての指標で既存手法を上回る 定量的結果 (2/3) • • • •
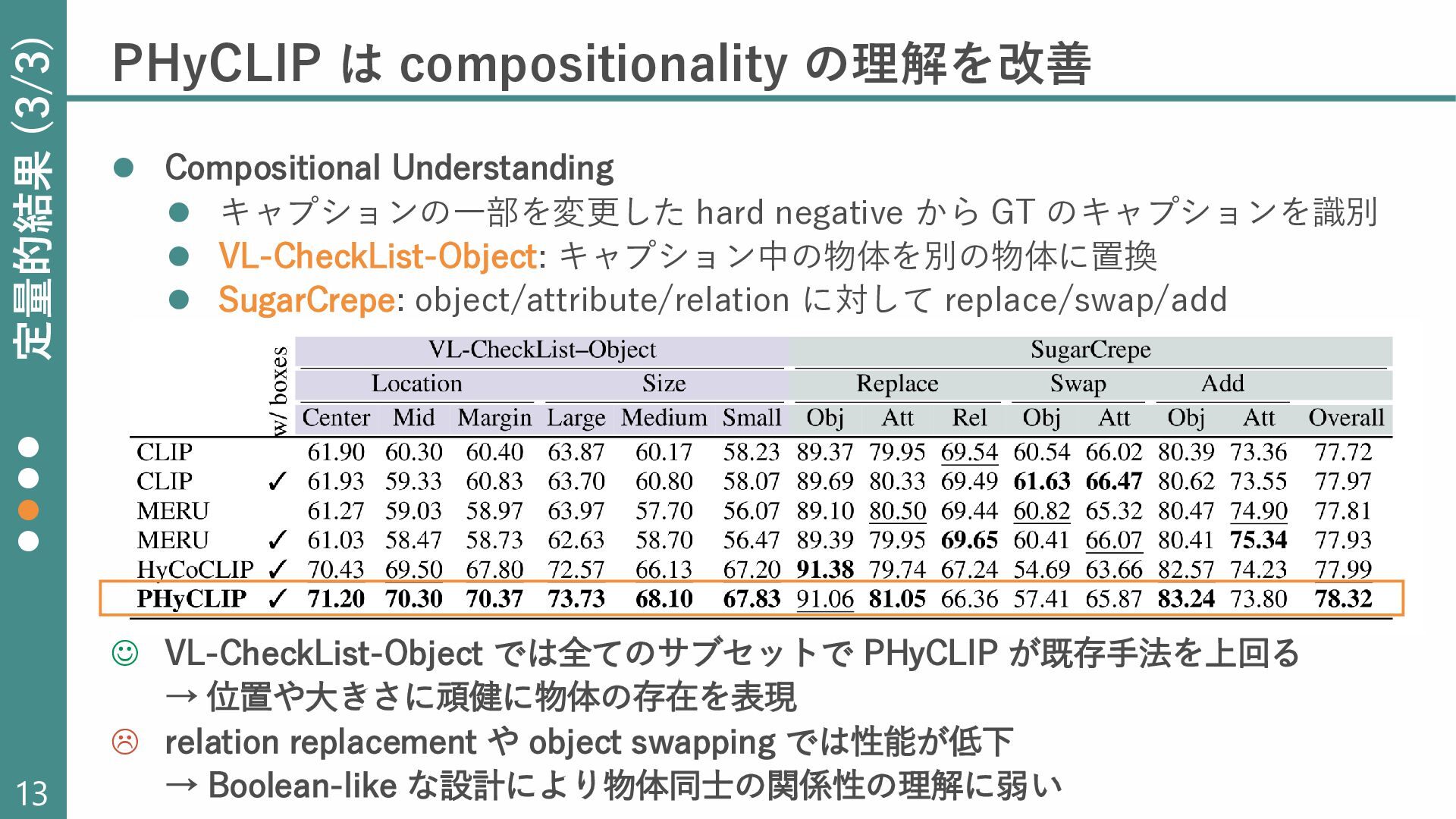
13 PHyCLIP は compositionality の理解を改善 ⚫ Compositional Understanding ⚫ キャプションの一部を変更した
hard negative から GT のキャプションを識別 ⚫ VL-CheckList-Object: キャプション中の物体を別の物体に置換 ⚫ SugarCrepe: object/attribute/relation に対して replace/swap/add ☺ VL-CheckList-Object では全てのサブセットで PHyCLIP が既存手法を上回る → 位置や大きさに頑健に物体の存在を表現 relation replacement や object swapping では性能が低下 → Boolean-like な設計により物体同士の関係性の理解に弱い 定量的結果 (3/3) • • • •
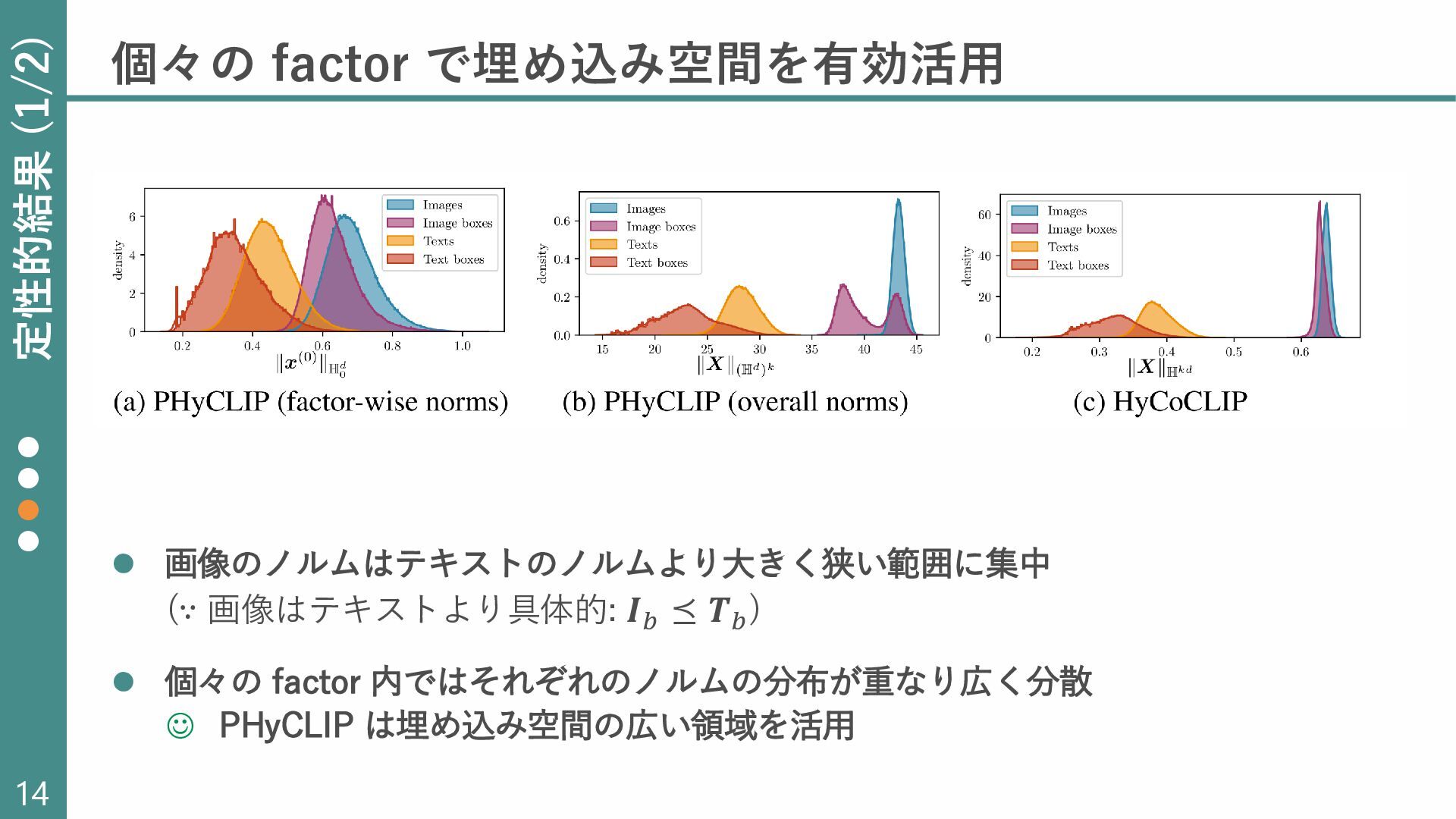
14 ⚫ 画像のノルムはテキストのノルムより大きく狭い範囲に集中 (∵ 画像はテキストより具体的: 𝑰𝑏 ⪯ 𝑻𝑏 ) ⚫
個々の factor 内ではそれぞれのノルムの分布が重なり広く分散 ☺ PHyCLIP は埋め込み空間の広い領域を活用 個々の factor で埋め込み空間を有効活用 定性的結果 (1/2) • • • •
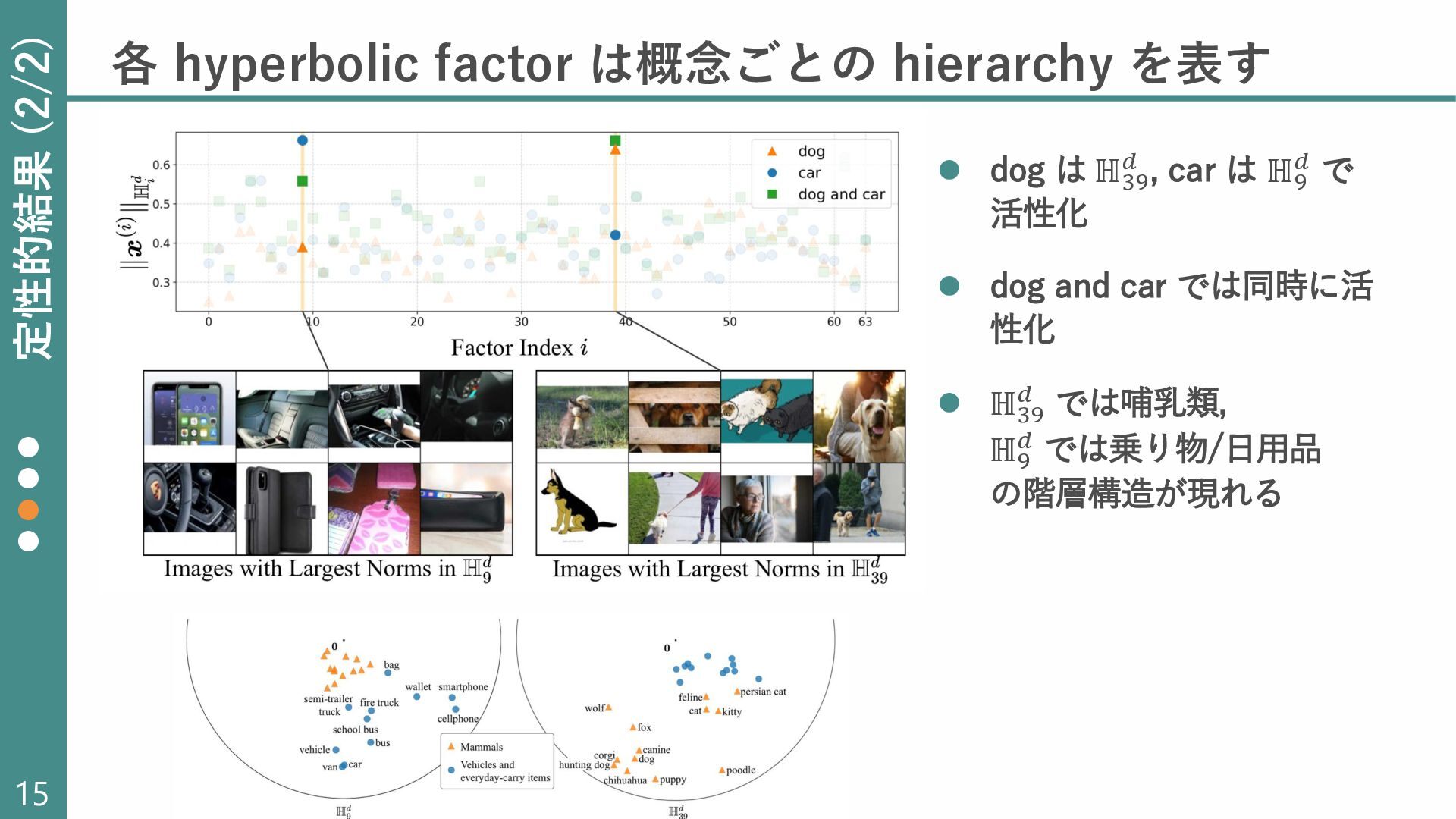
15 ⚫ dog は ℍ39 𝑑 , car は ℍ9
𝑑 で 活性化 ⚫ dog and car では同時に活 性化 ⚫ ℍ39 𝑑 では哺乳類, ℍ9 𝑑 では乗り物/日用品 の階層構造が現れる 各 hyperbolic factor は概念ごとの hierarchy を表す 定性的結果 (2/2) • • • •
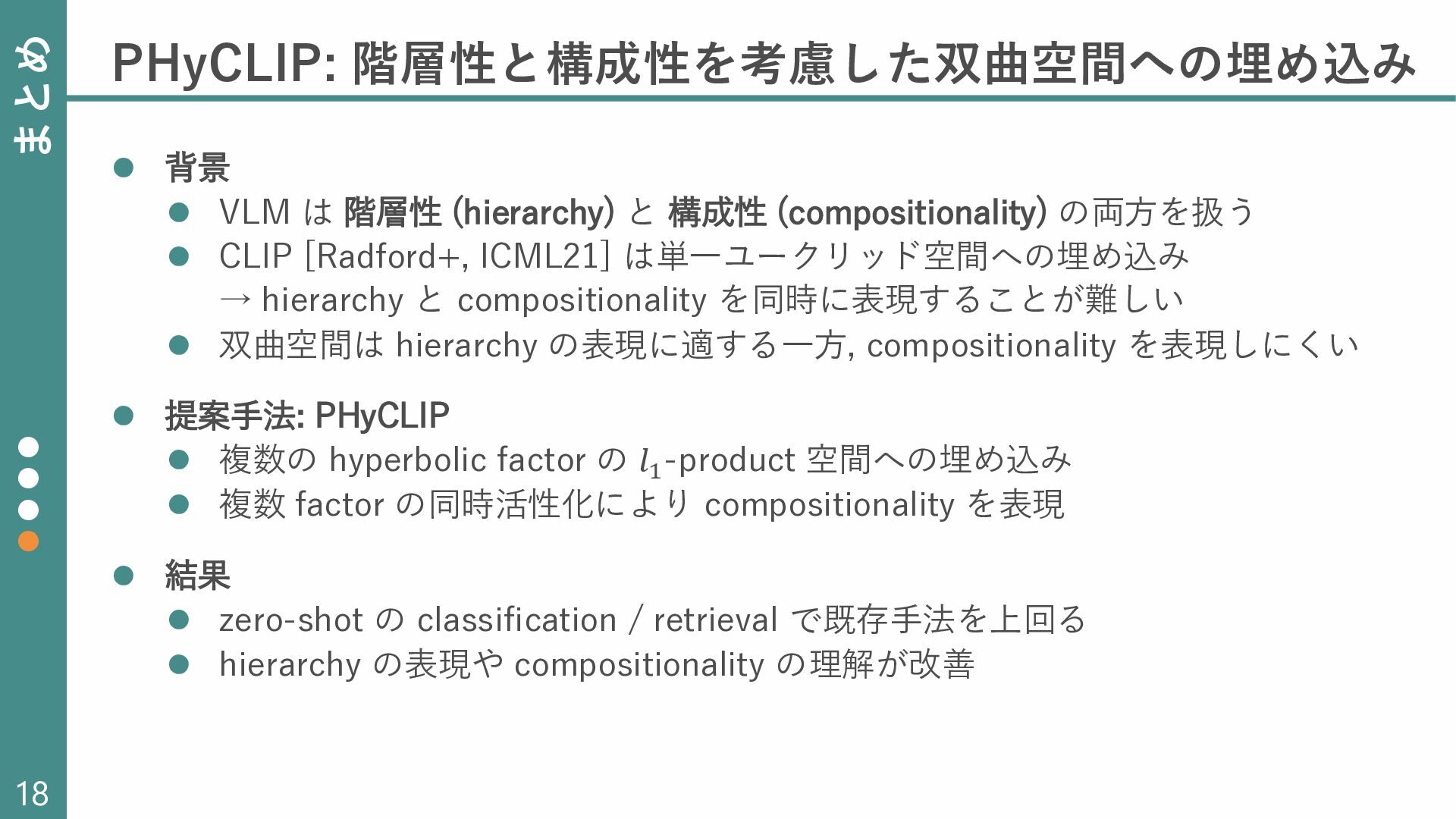
18 PHyCLIP: 階層性と構成性を考慮した双曲空間への埋め込み ⚫ 背景 ⚫ VLM は 階層性 (hierarchy)
と 構成性 (compositionality) の両方を扱う ⚫ CLIP [Radford+, ICML21] は単一ユークリッド空間への埋め込み → hierarchy と compositionality を同時に表現することが難しい ⚫ 双曲空間は hierarchy の表現に適する一方, compositionality を表現しにくい ⚫ 提案手法: PHyCLIP ⚫ 複数の hyperbolic factor の 𝑙1 -product 空間への埋め込み ⚫ 複数 factor の同時活性化により compositionality を表現 ⚫ 結果 ⚫ zero-shot の classification / retrieval で既存手法を上回る ⚫ hierarchy の表現や compositionality の理解が改善 まとめ • • • •
19 Poincaré Embeddings [Nickel+, NeurIPS17] の詳細 ⚫ Poincaré モデル ⚫
Riemannian metric tensor 𝑔𝑥 = 2 1− 𝒙 2 2 𝑔𝐸 (𝑔𝐸 : Euclidean metric tensor) ⚫ 点 𝑢, 𝑣 ∈ ℬ𝒹 間の距離 𝑑 𝒖, 𝒗 = arcosh 1 + 2 𝒖 − 𝒗 2 1 − 𝒖 2 1 − 𝒗 2 ⚫ Optimization 𝜽𝑡+1 ← 𝑝𝑟𝑜𝑗 𝜽𝑡 − 𝜂𝑡 1 − 𝜽𝑡 2 2 4 ∇𝐸 ⚫ Loss ℒ Θ = 𝑢,𝑣 ∈𝒟 log 𝑒−𝑑 𝒖,𝒗 σ 𝒗′∈𝒩 𝑢 𝑒−𝑑 𝒖,𝒗′ Appendix (1/4) • • • •
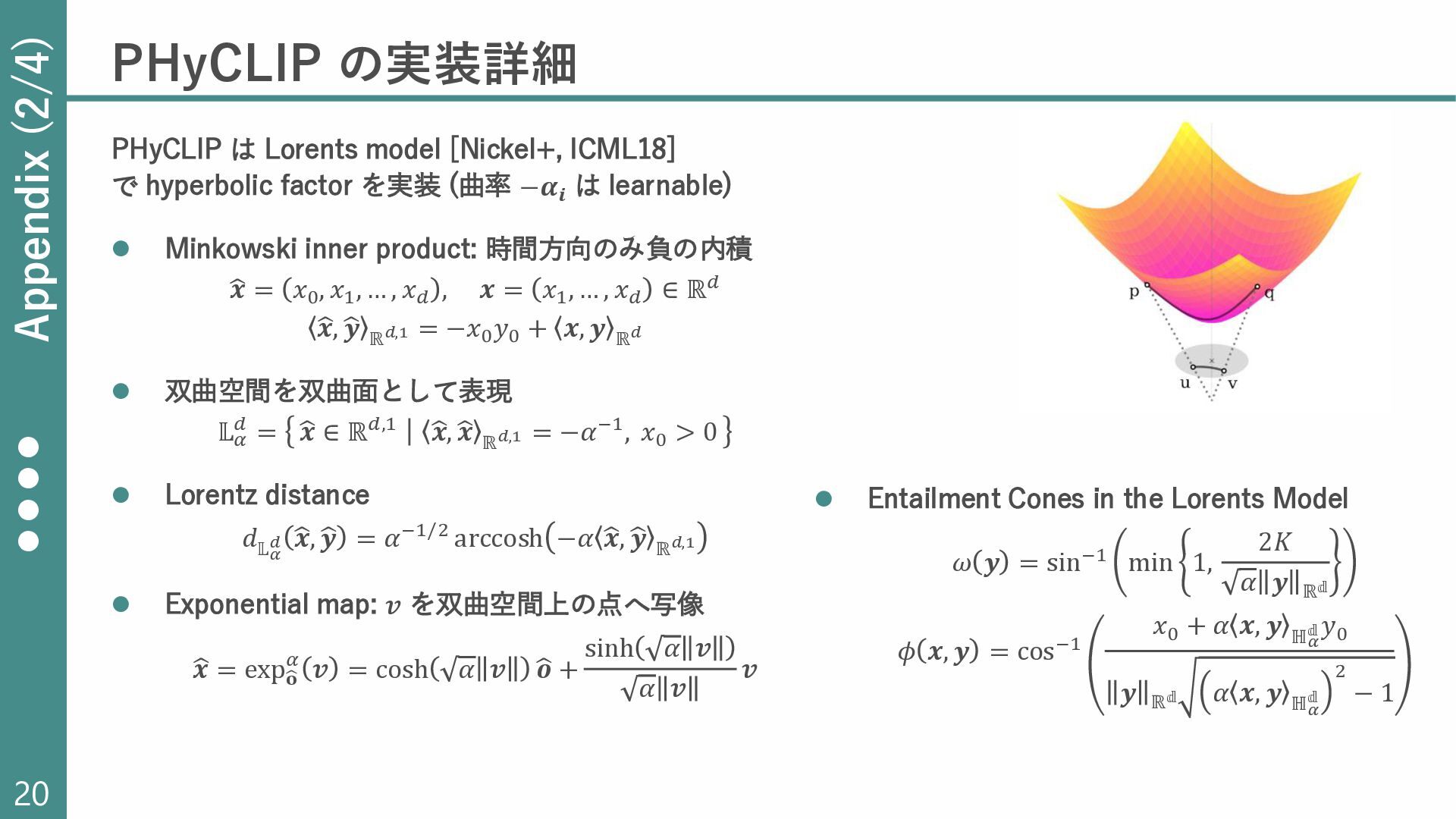
20 PHyCLIP の実装詳細 Appendix (2/4) • • • • PHyCLIP
は Lorents model [Nickel+, ICML18] で hyperbolic factor を実装 (曲率 −𝜶𝒊 は learnable) ⚫ Minkowski inner product: 時間方向のみ負の内積 ෝ 𝒙 = 𝑥0 , 𝑥1 , … , 𝑥𝑑 , 𝒙 = 𝑥1 , … , 𝑥𝑑 ∈ ℝ𝑑 ෝ 𝒙, ෝ 𝒚 ℝ𝑑,1 = −𝑥0 𝑦0 + 𝒙, 𝒚 ℝ𝑑 ⚫ 双曲空間を双曲面として表現 𝕃𝛼 𝑑 = ෝ 𝒙 ∈ ℝ𝑑,1 ෝ 𝒙, ෝ 𝒙 ℝ𝑑,1 = −𝛼−1, 𝑥0 > 0 ⚫ Lorentz distance 𝑑 𝕃𝛼 𝑑 ෝ 𝒙, ෝ 𝒚 = 𝛼−1/2 arccosh −𝛼 ෝ 𝒙, ෝ 𝒚 ℝ𝑑,1 ⚫ Exponential map: 𝒗 を双曲空間上の点へ写像 ෝ 𝒙 = expෝ 𝐨 𝛼 𝒗 = cosh 𝛼 𝒗 ෝ 𝒐 + sinh 𝛼 𝒗 𝛼 𝒗 𝒗 ⚫ Entailment Cones in the Lorents Model 𝜔 𝒚 = sin−1 min 1, 2𝐾 𝛼 𝒚 ℝ𝕕 𝜙 𝒙, 𝒚 = cos−1 𝑥0 + 𝛼 𝒙, 𝒚 ℍ𝛼 𝕕 𝑦0 𝒚 ℝ𝕕 𝛼 𝒙, 𝒚 ℍ𝛼 𝕕 2 − 1
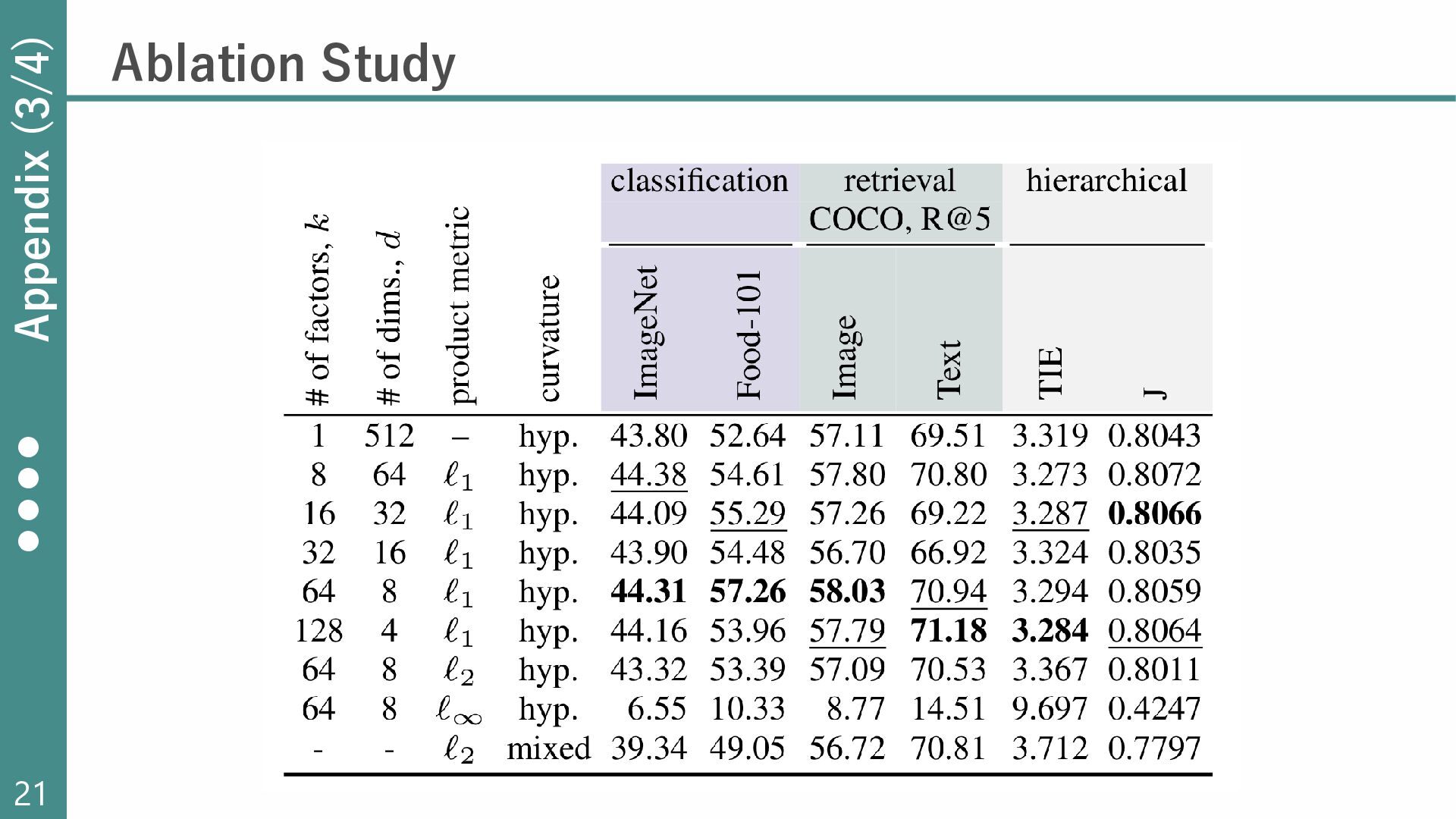
21 Ablation Study Appendix (3/4) • • • •
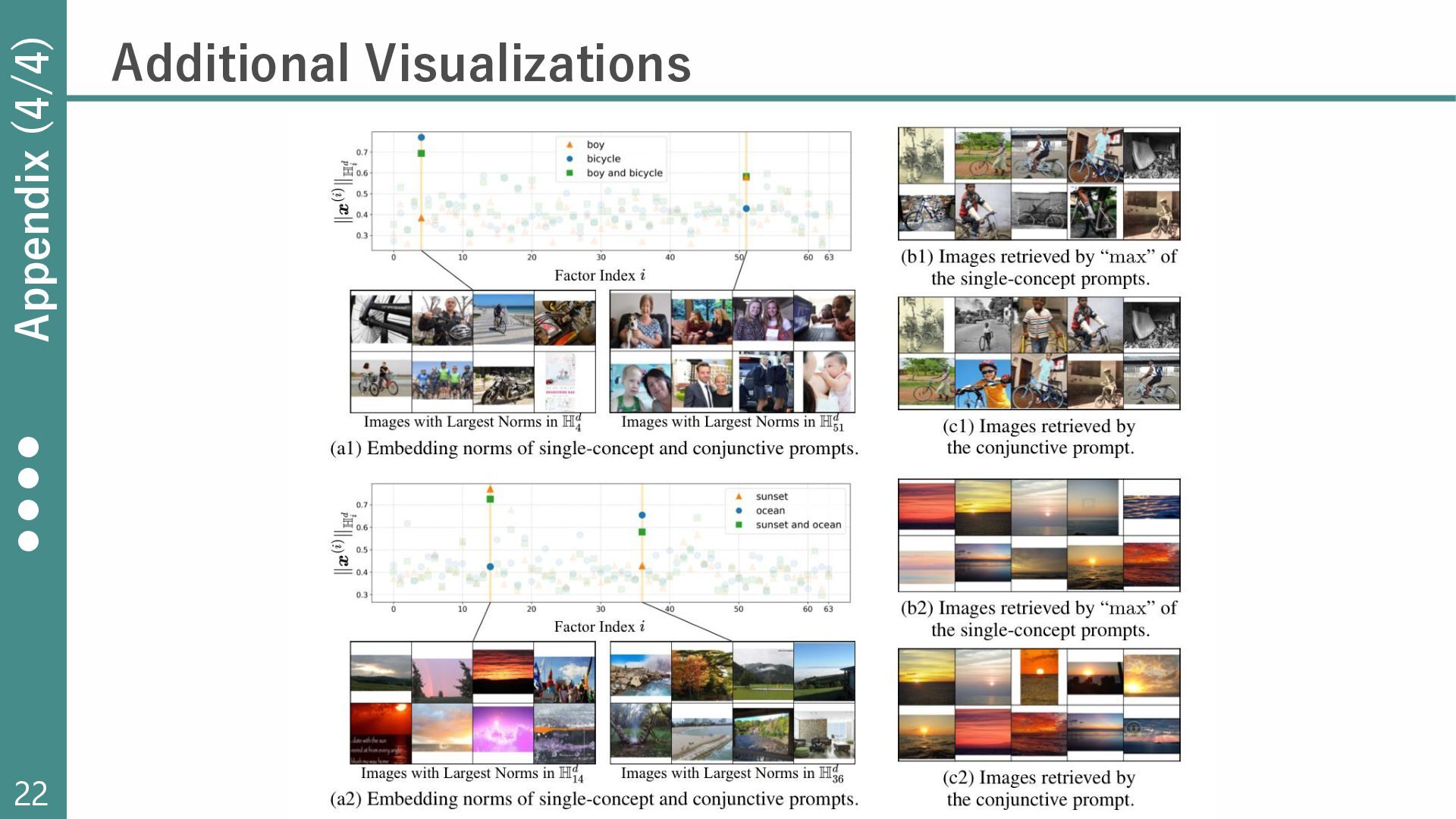
22 Additional Visualizations Appendix (4/4) • • • •
{kind=link}
{kind=link}
{kind=link}
![4 双曲空間は hierarchy を自然に表現できる Poincaré Embeddings [Nickel+, NeurIPS17] ⚫ 背景](https://files.speakerdeck.com/presentations/adf767e1fed246f3b39e0014c8dc8a6b/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![10 GRIT を用いた学習 ⚫ 訓練データセット ⚫ GRIT [Peng+, ICCV23]: 自動アノテーションされた](https://files.speakerdeck.com/presentations/adf767e1fed246f3b39e0014c8dc8a6b/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![19 Poincaré Embeddings [Nickel+, NeurIPS17] の詳細 ⚫ Poincaré モデル ⚫](https://files.speakerdeck.com/presentations/adf767e1fed246f3b39e0014c8dc8a6b/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}