2026/02/27開催 第141回NearMe技術勉強会 資料
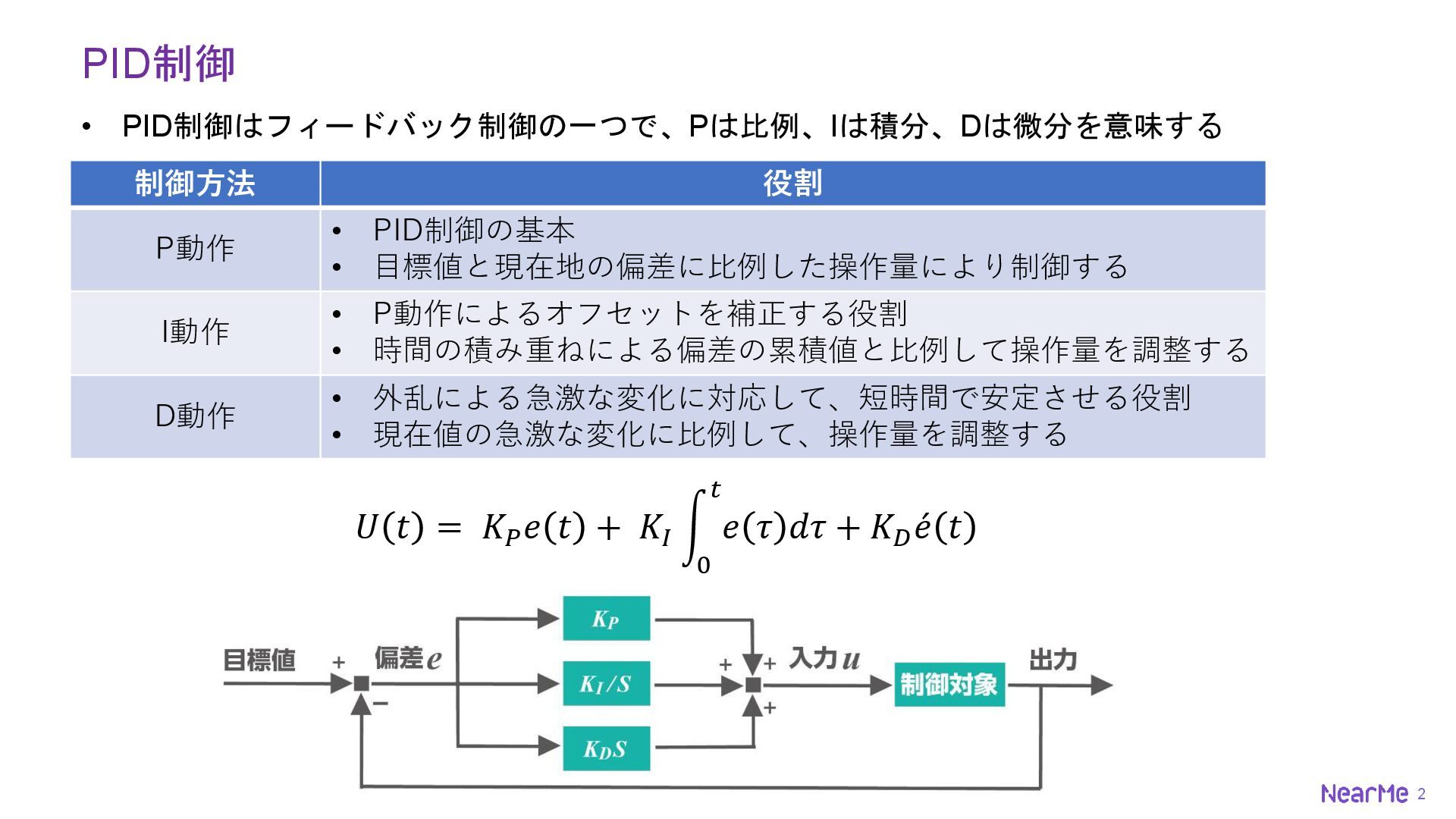
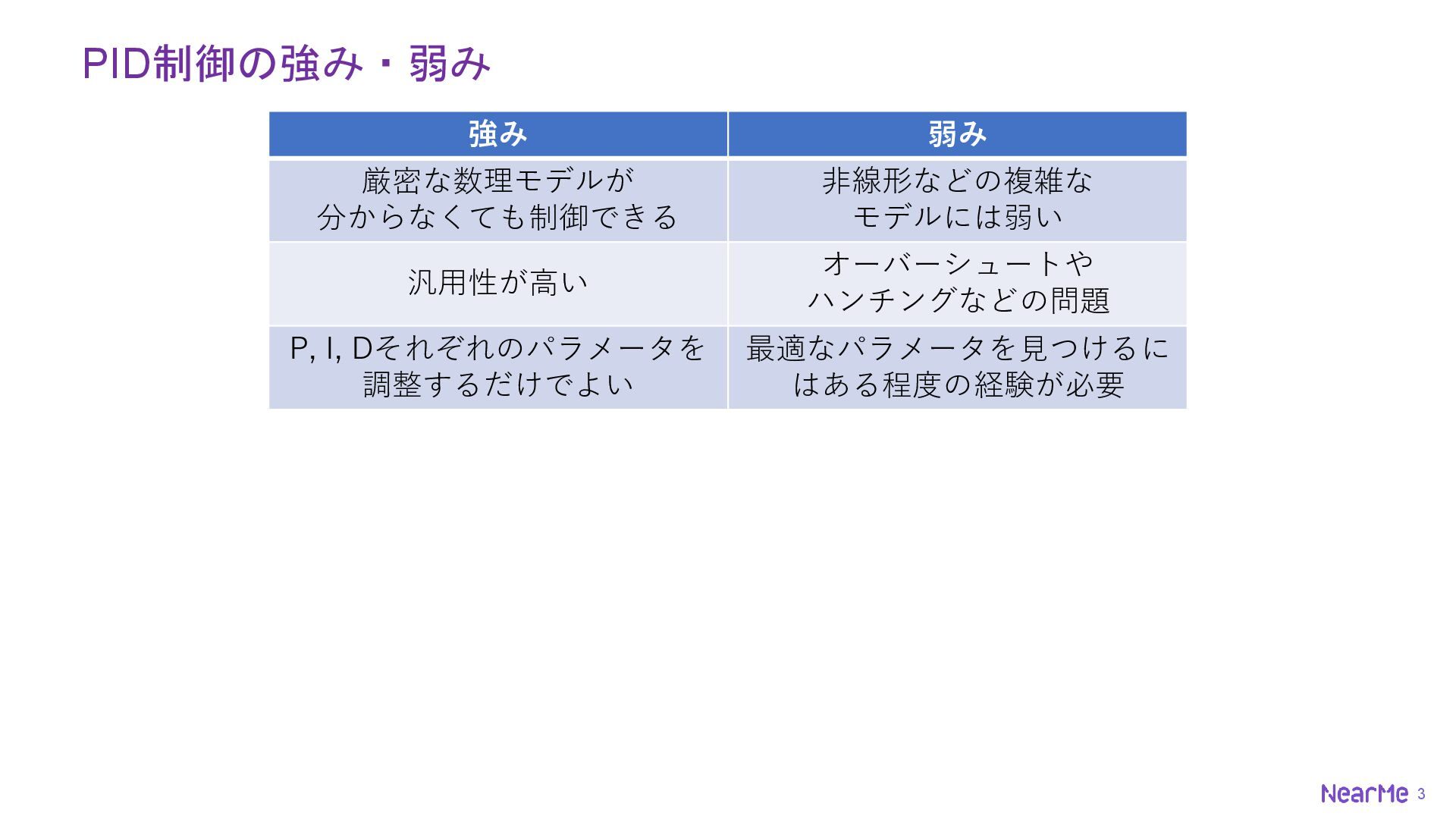
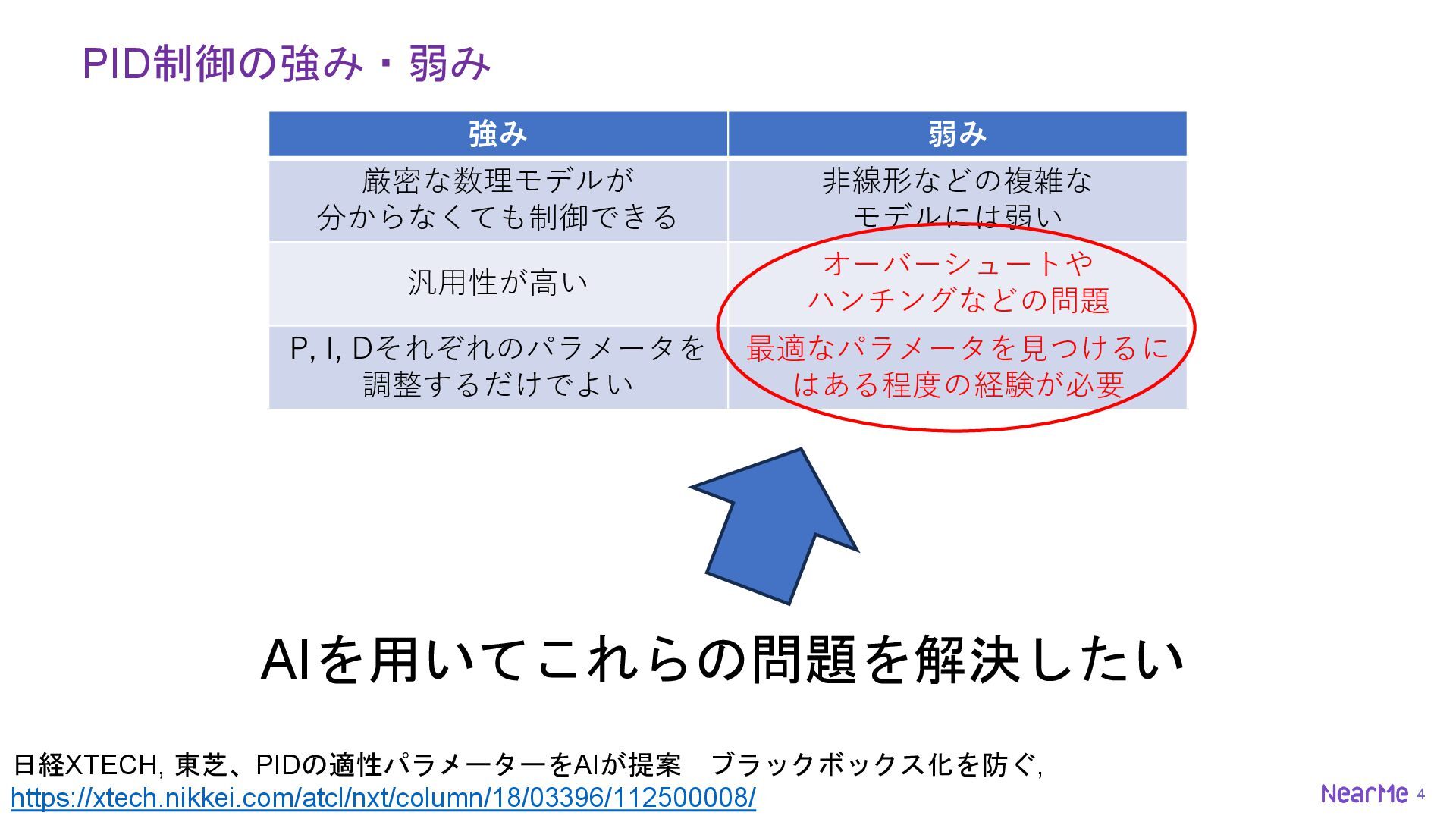
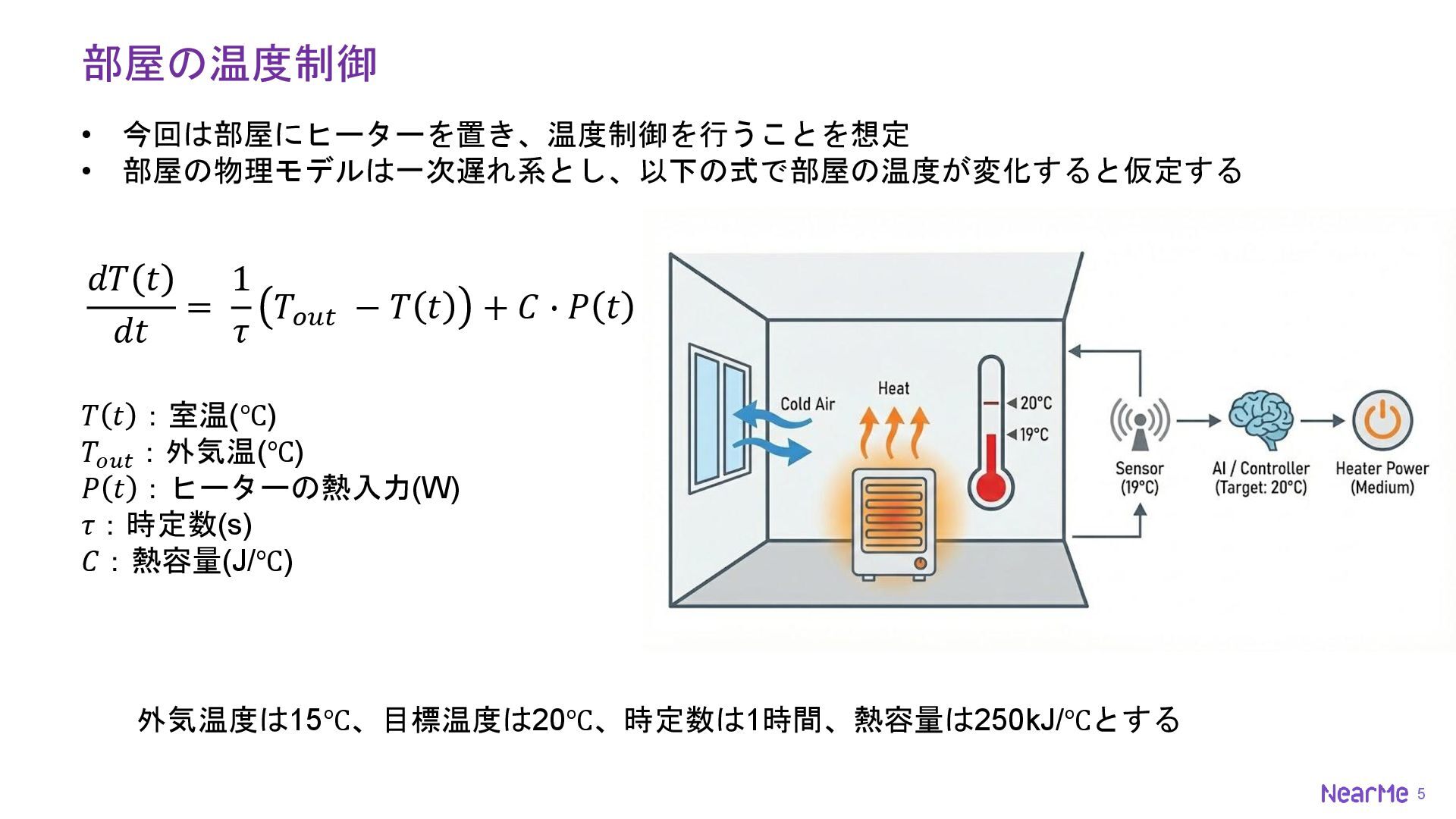
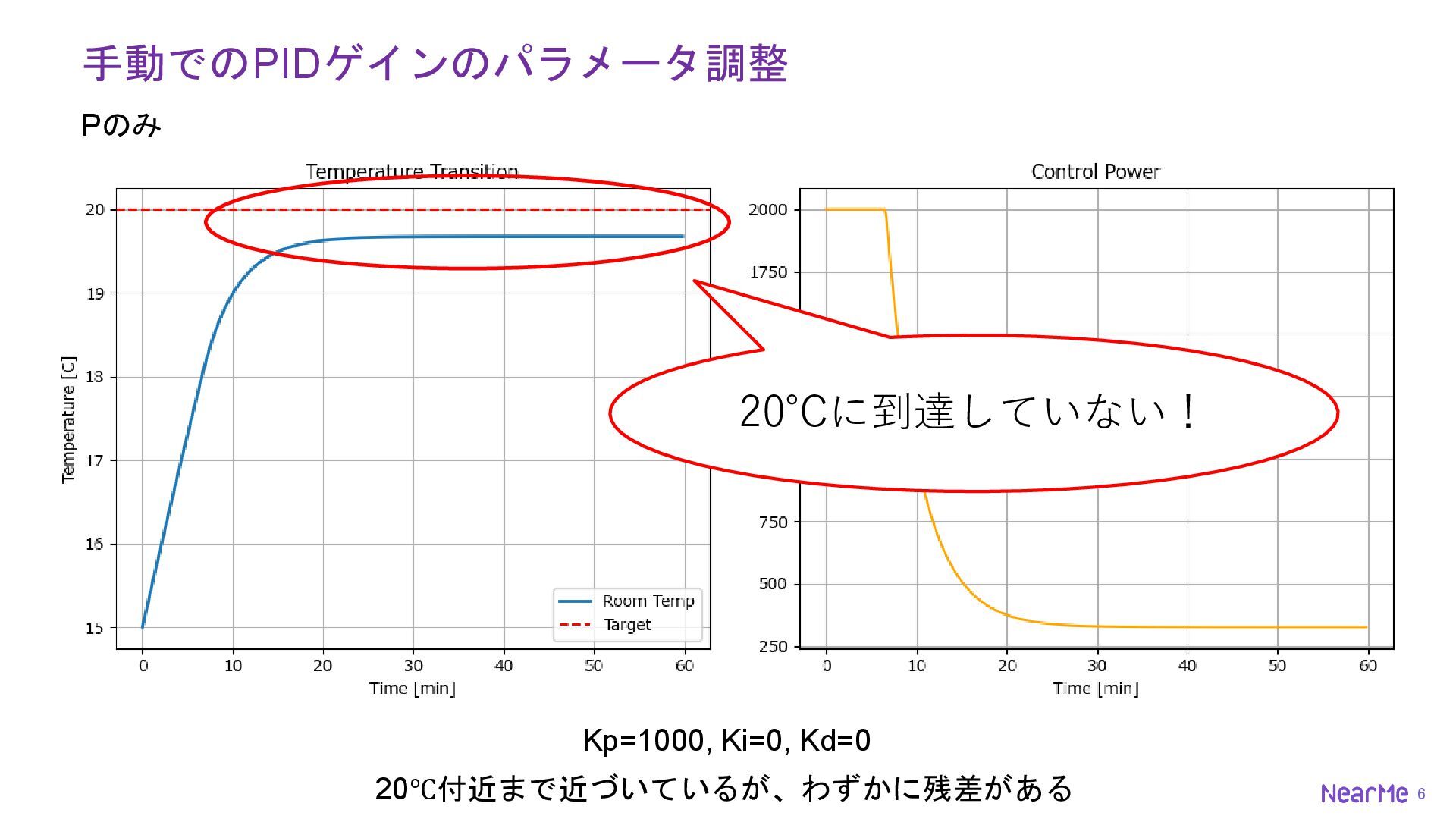
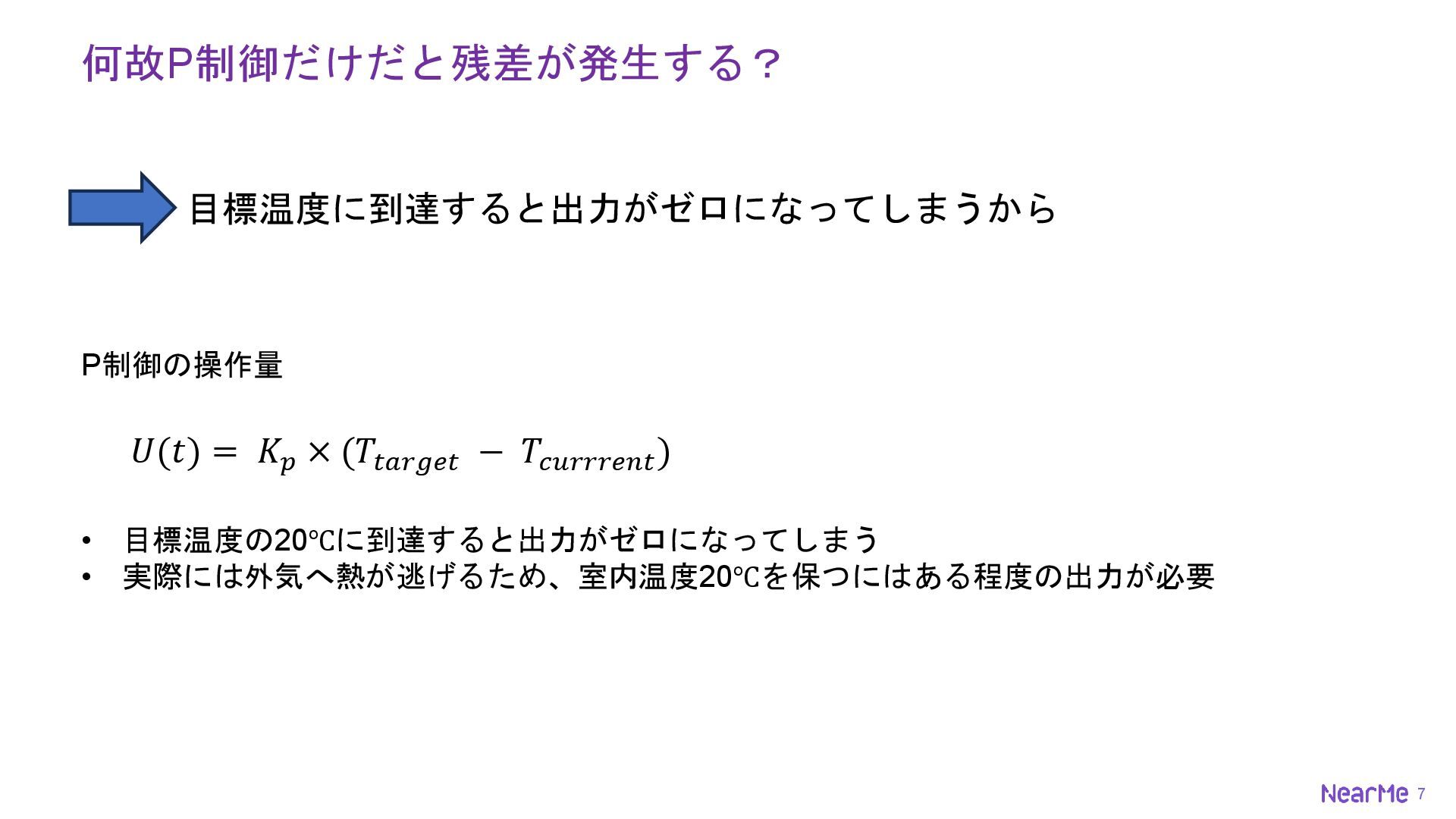
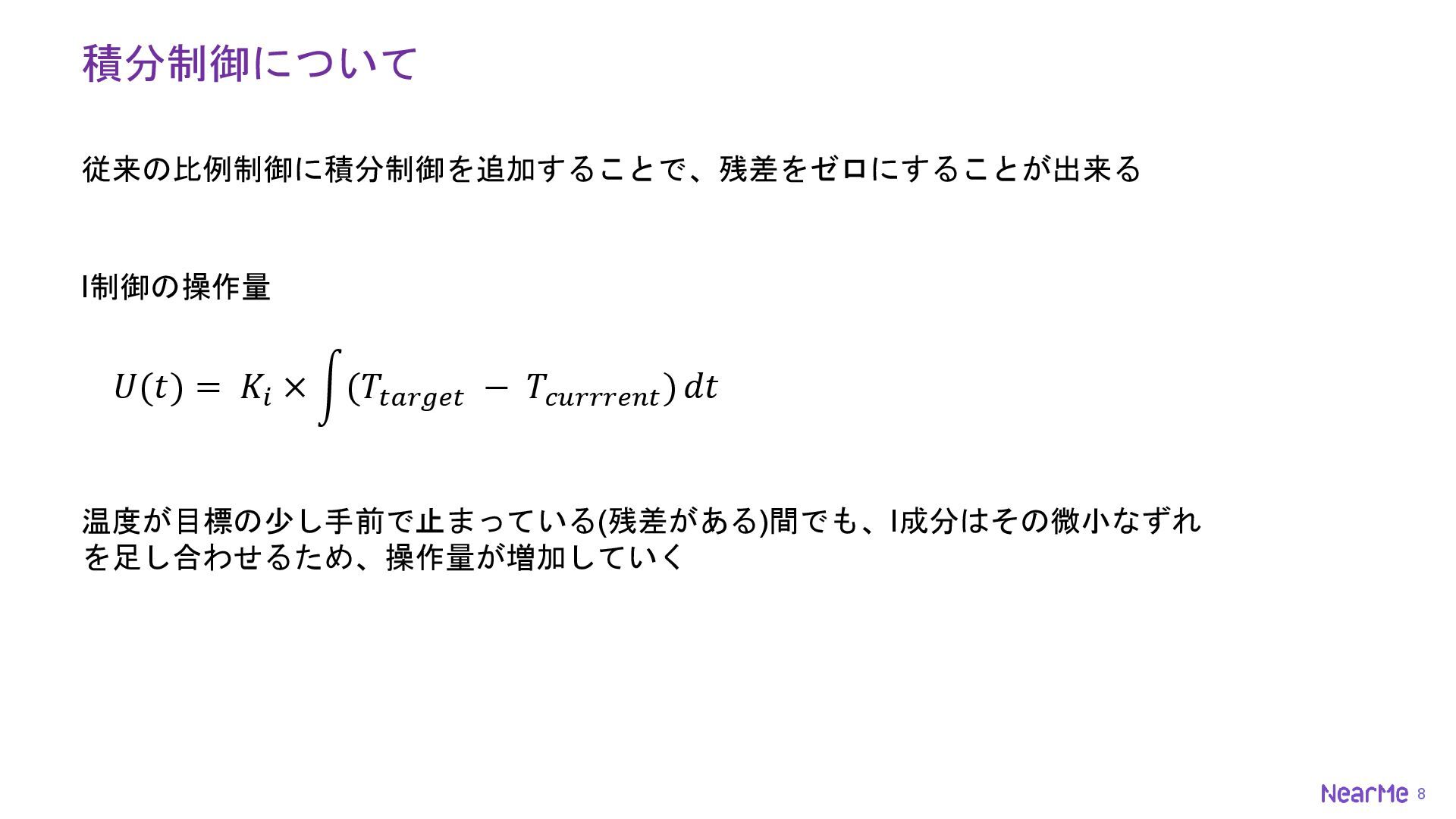
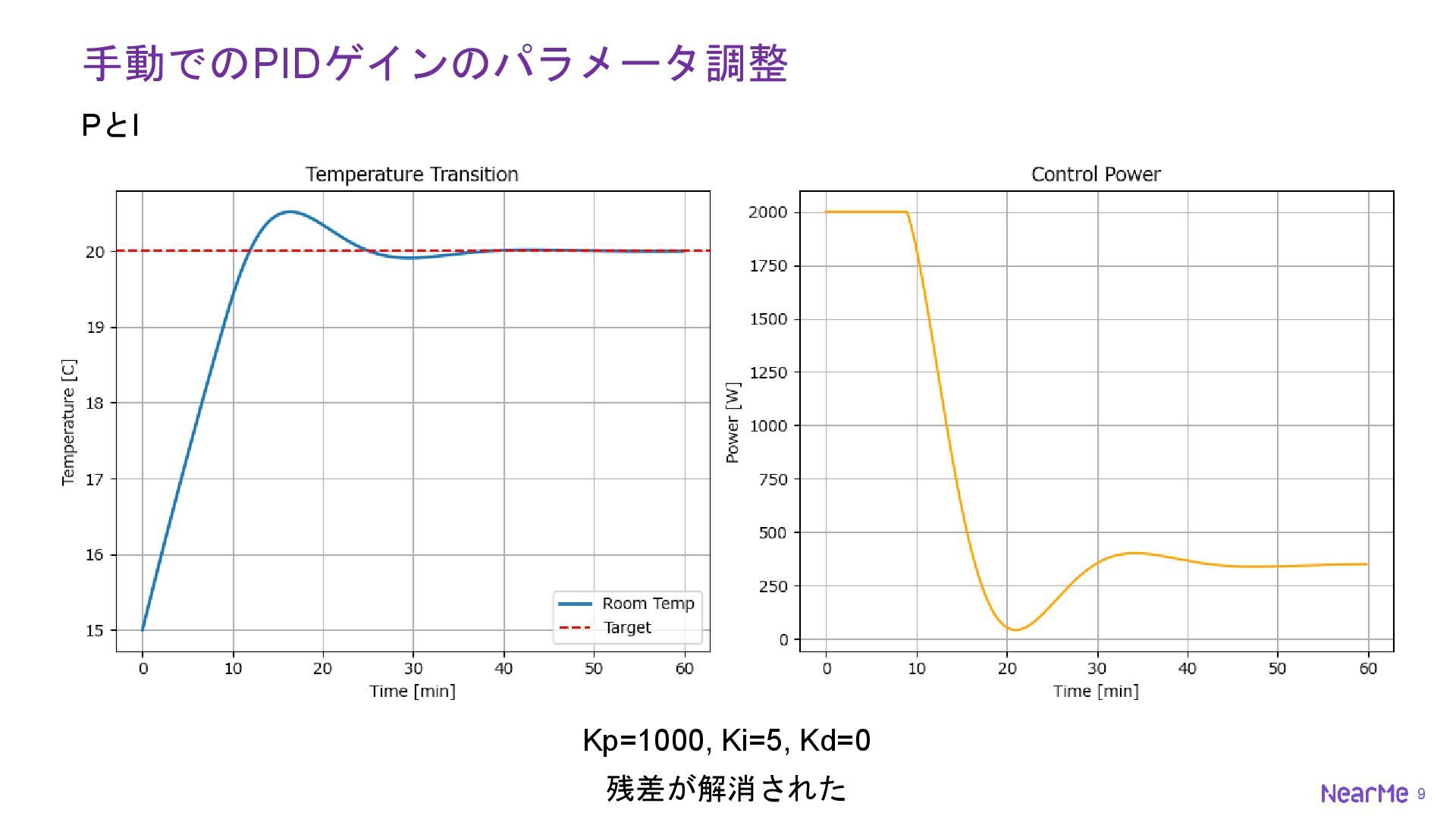
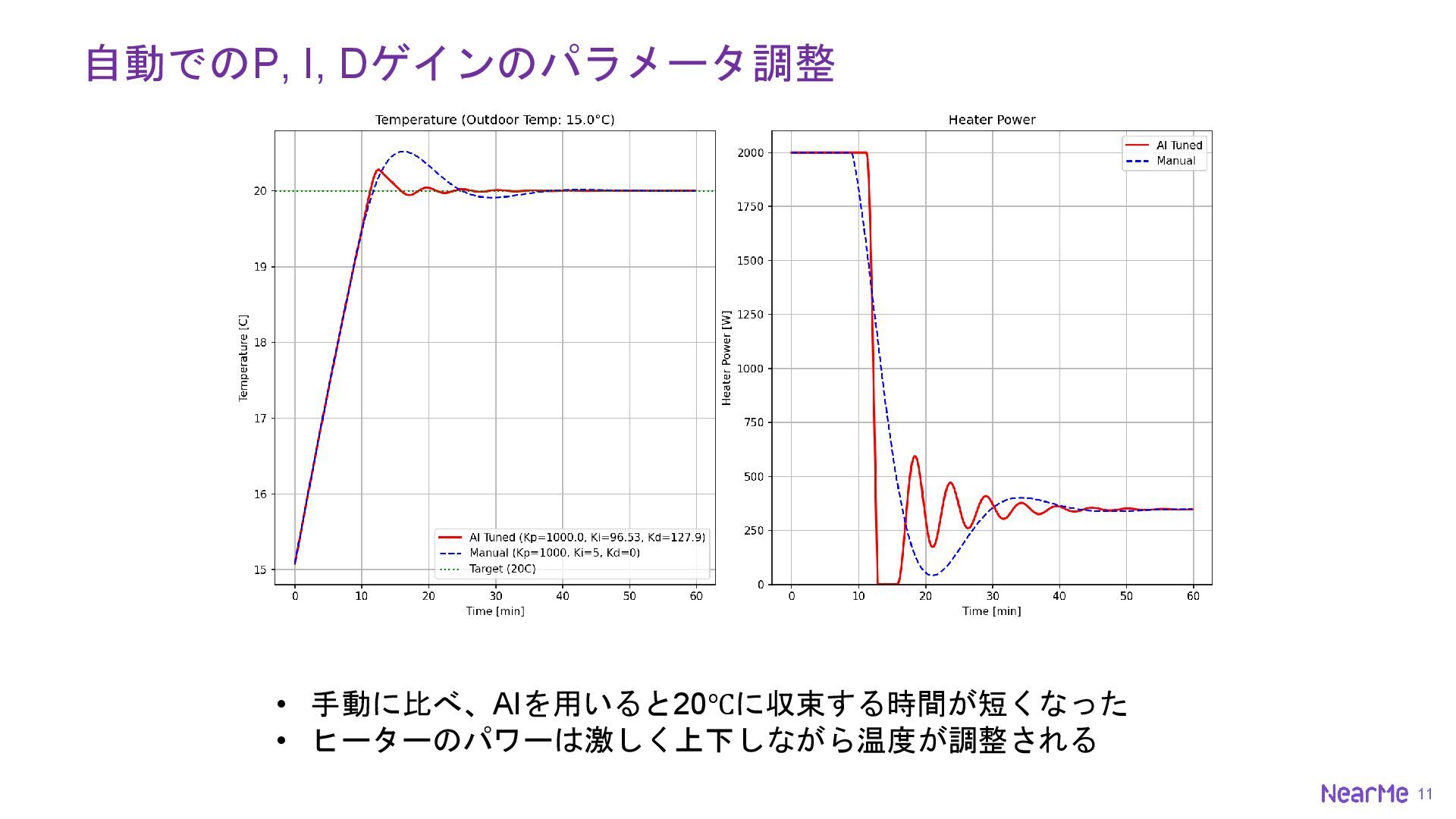
汎用性が高い一方で、最適なパラメータ(P, I, D)を見つけるには経験が必要とされるPID制御の弱点を、AIを用いて解決するアプローチを検証しました 。ヒーターを用いた部屋の温度制御(一次遅れ系モデル)を題材に 、Pythonの最適化フレームワーク「Optuna」を活用してベイズ最適化を行い、誤差の二乗(MSE)を最小化する手法を紹介しています 。AIチューニングにより目標温度への収束時間が短縮された成果や 、逆に出力が激しく振動するといった実運用(機器保護など)に向けた課題と今後の展望についてもまとめています 。
#PID制御 #AI #Optuna #Python #ベイズ最適化 #制御工学 #NearMe
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}