本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
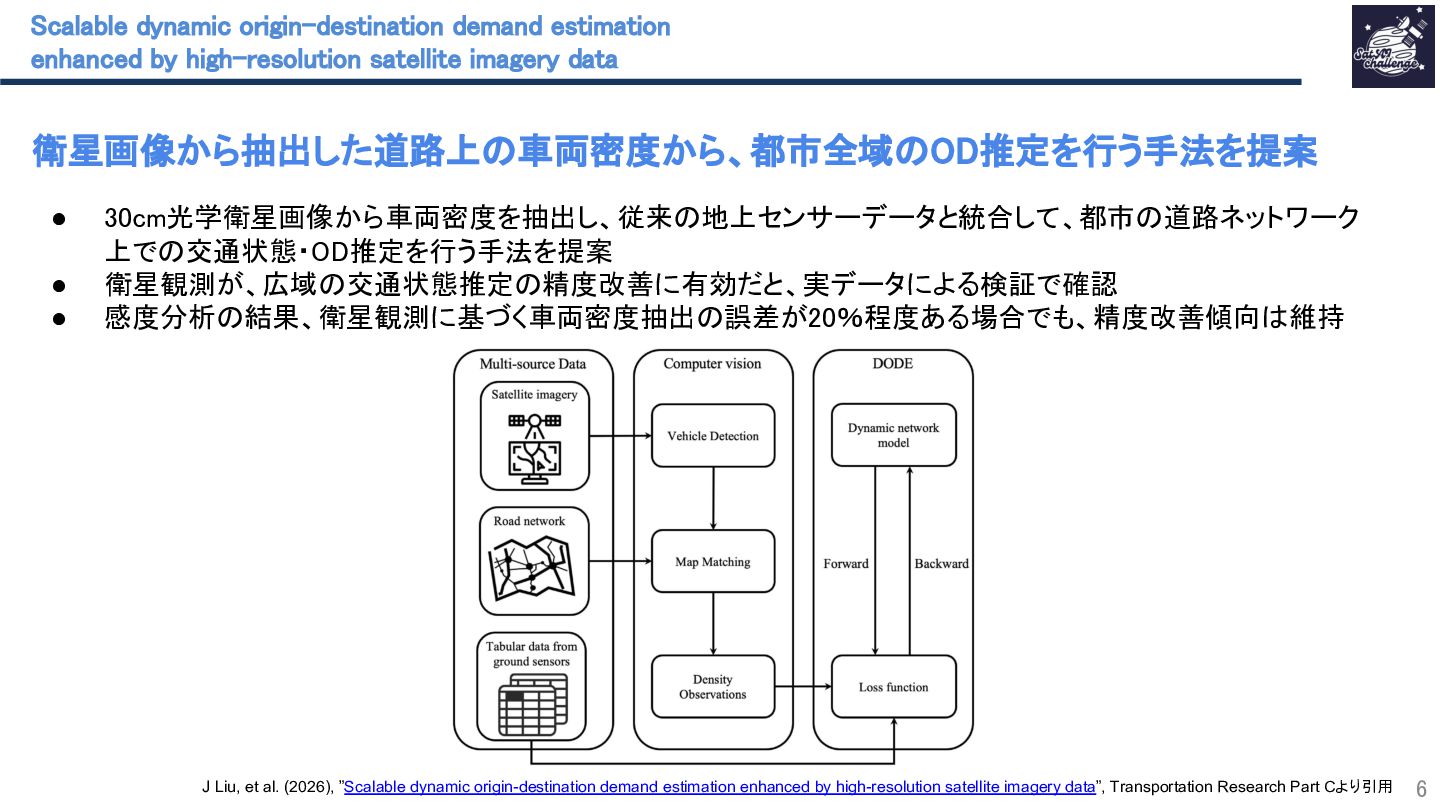
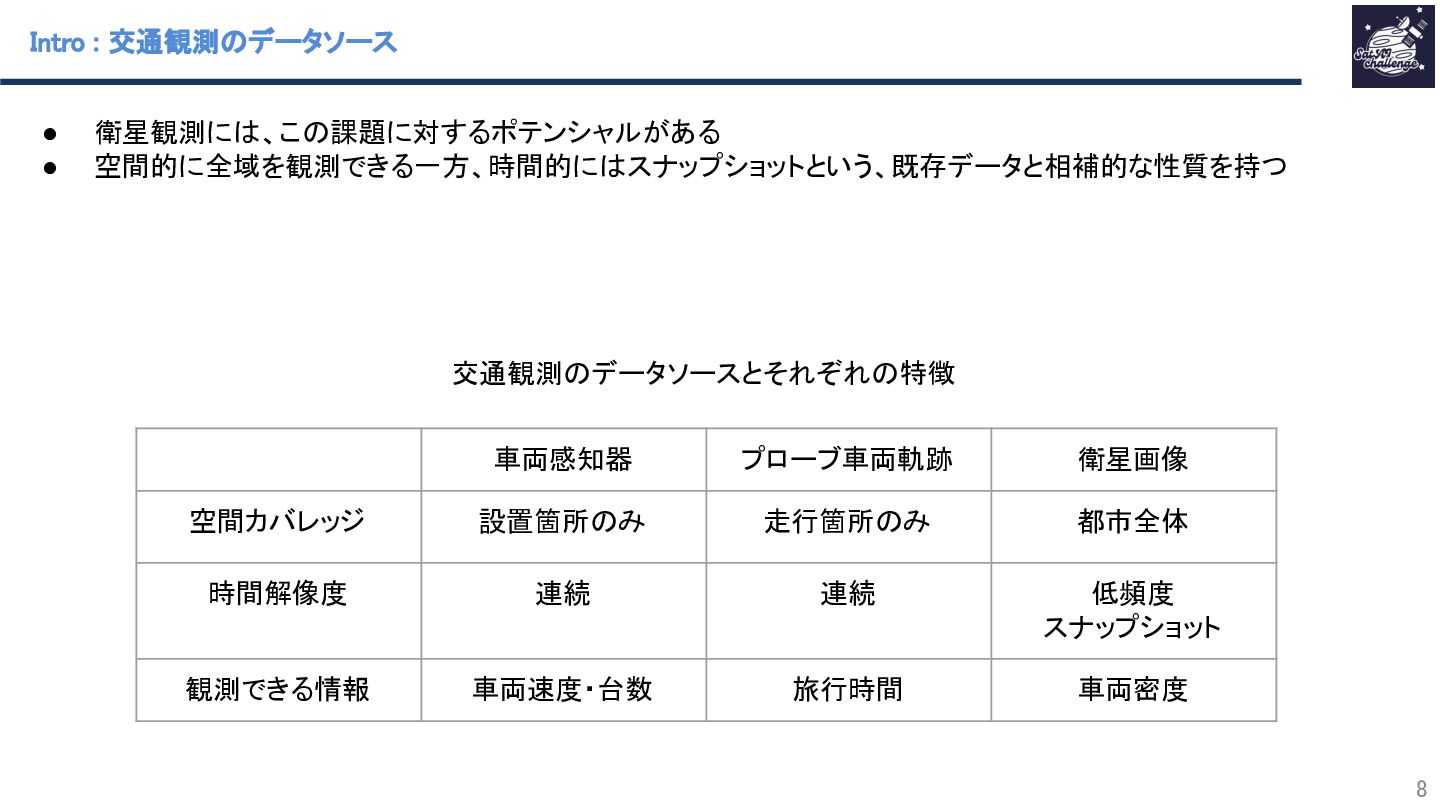
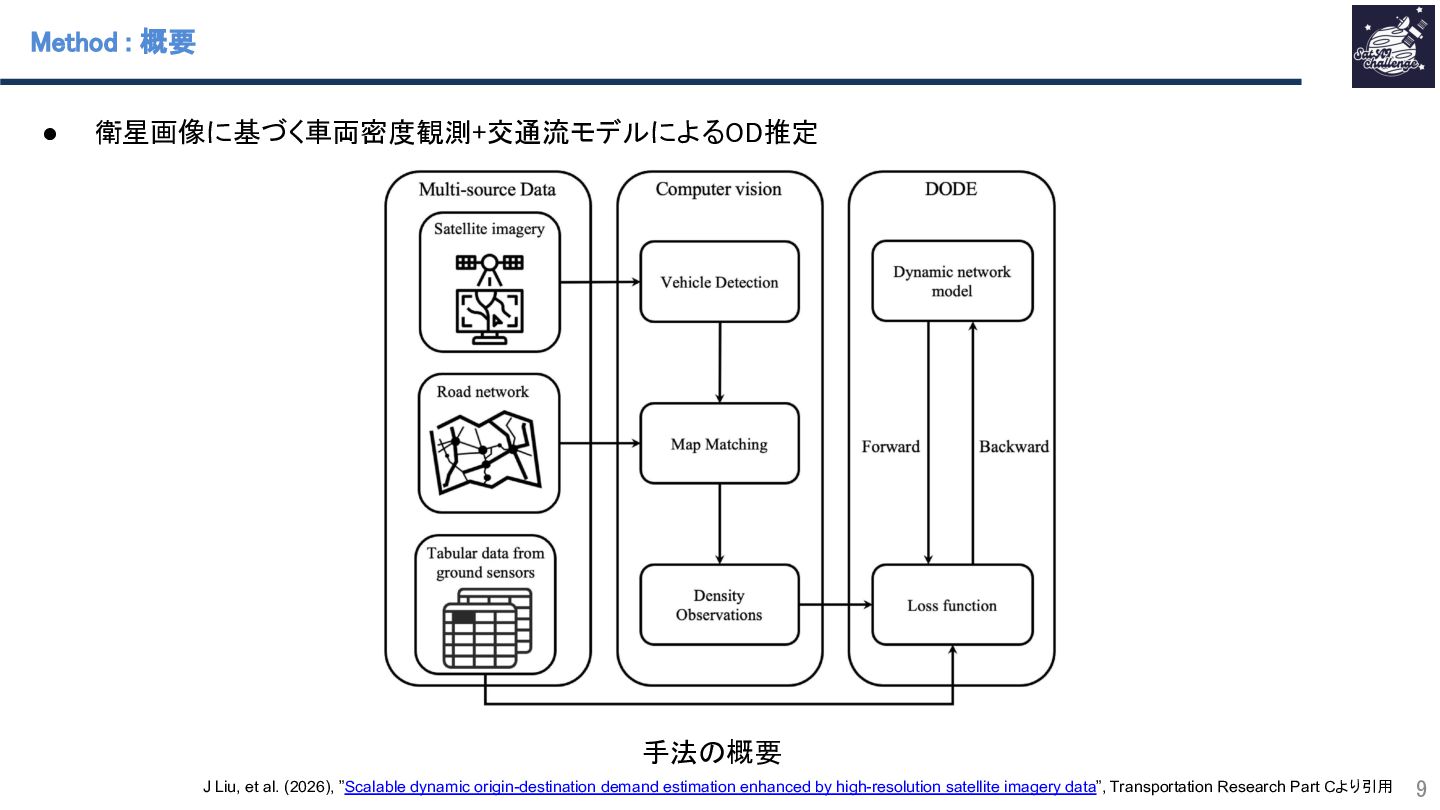
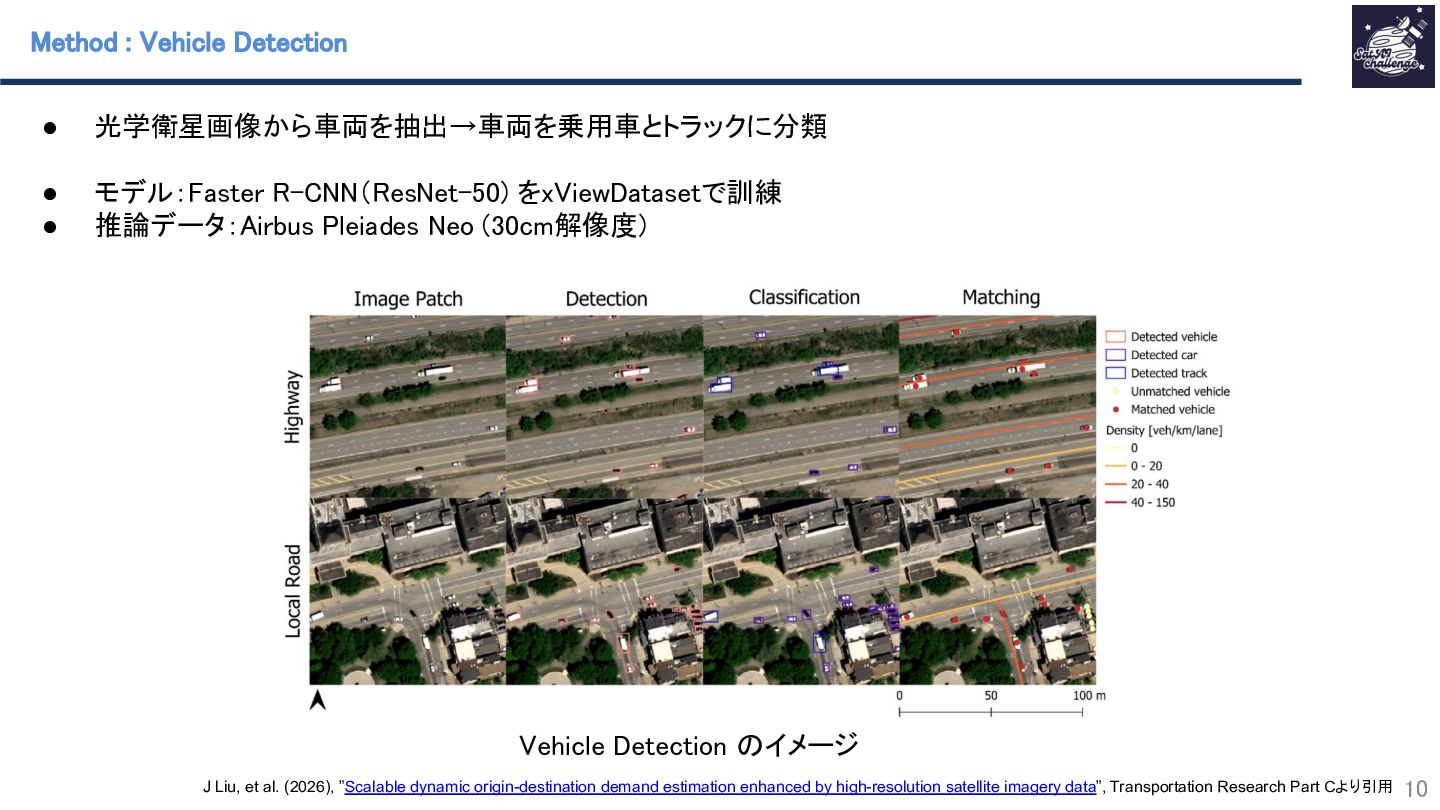
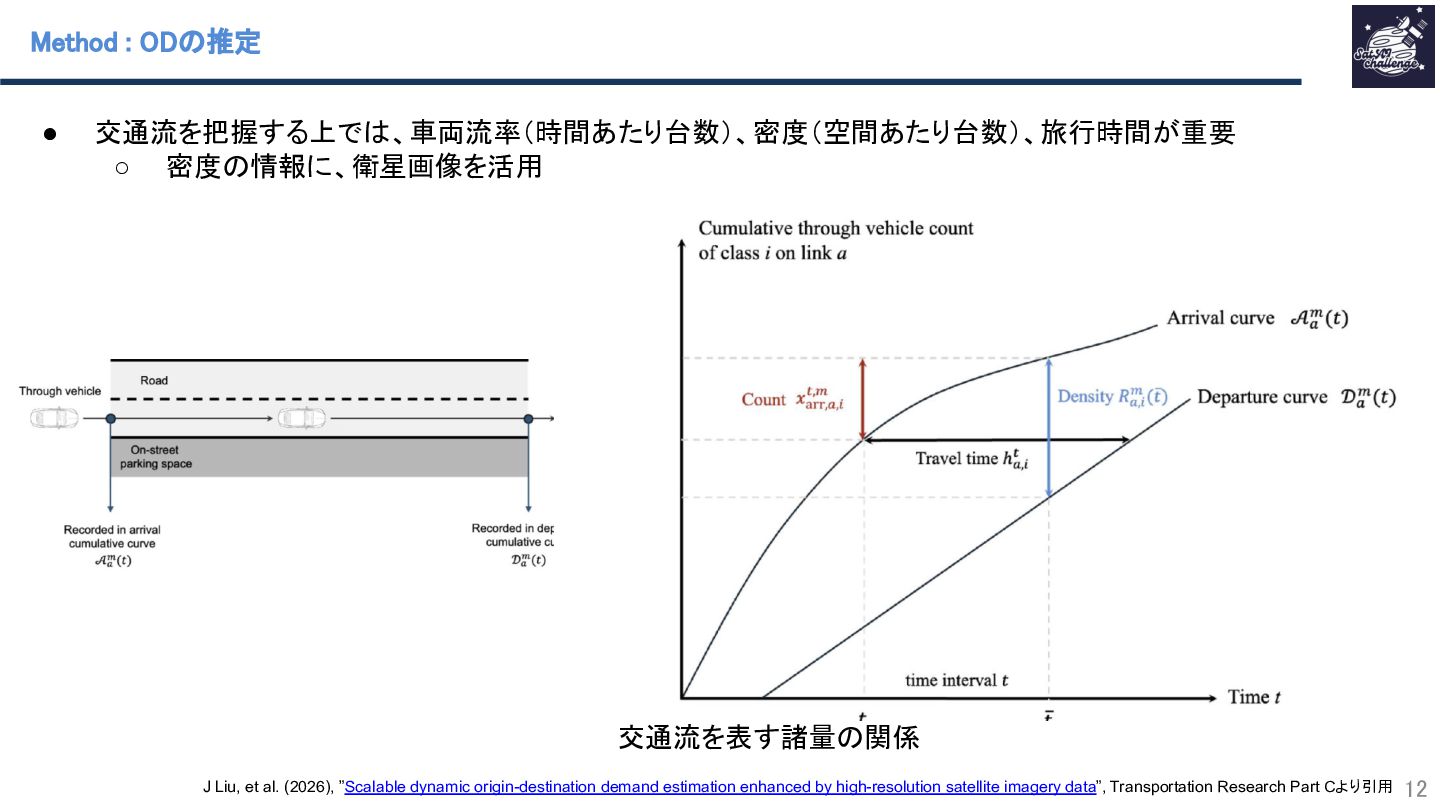
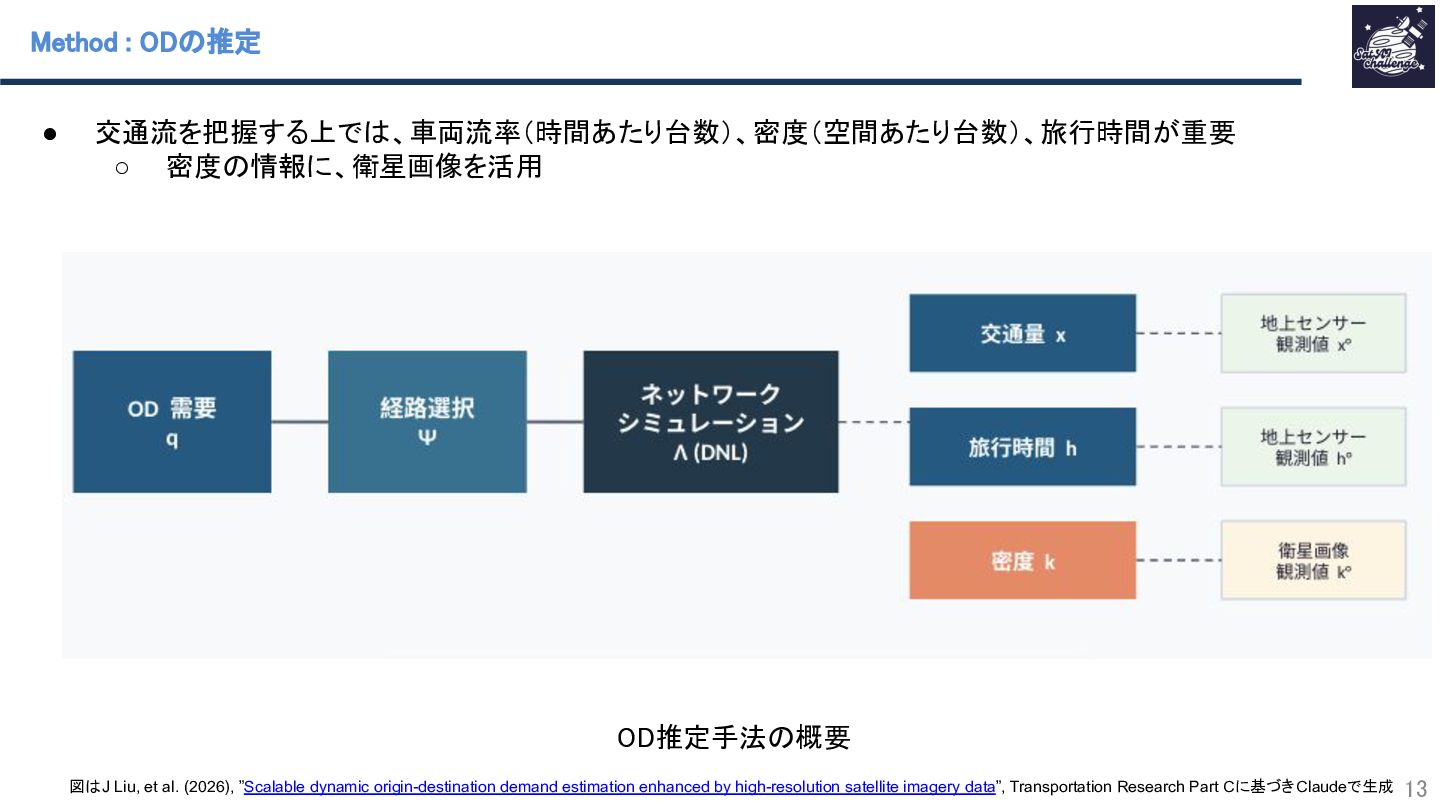
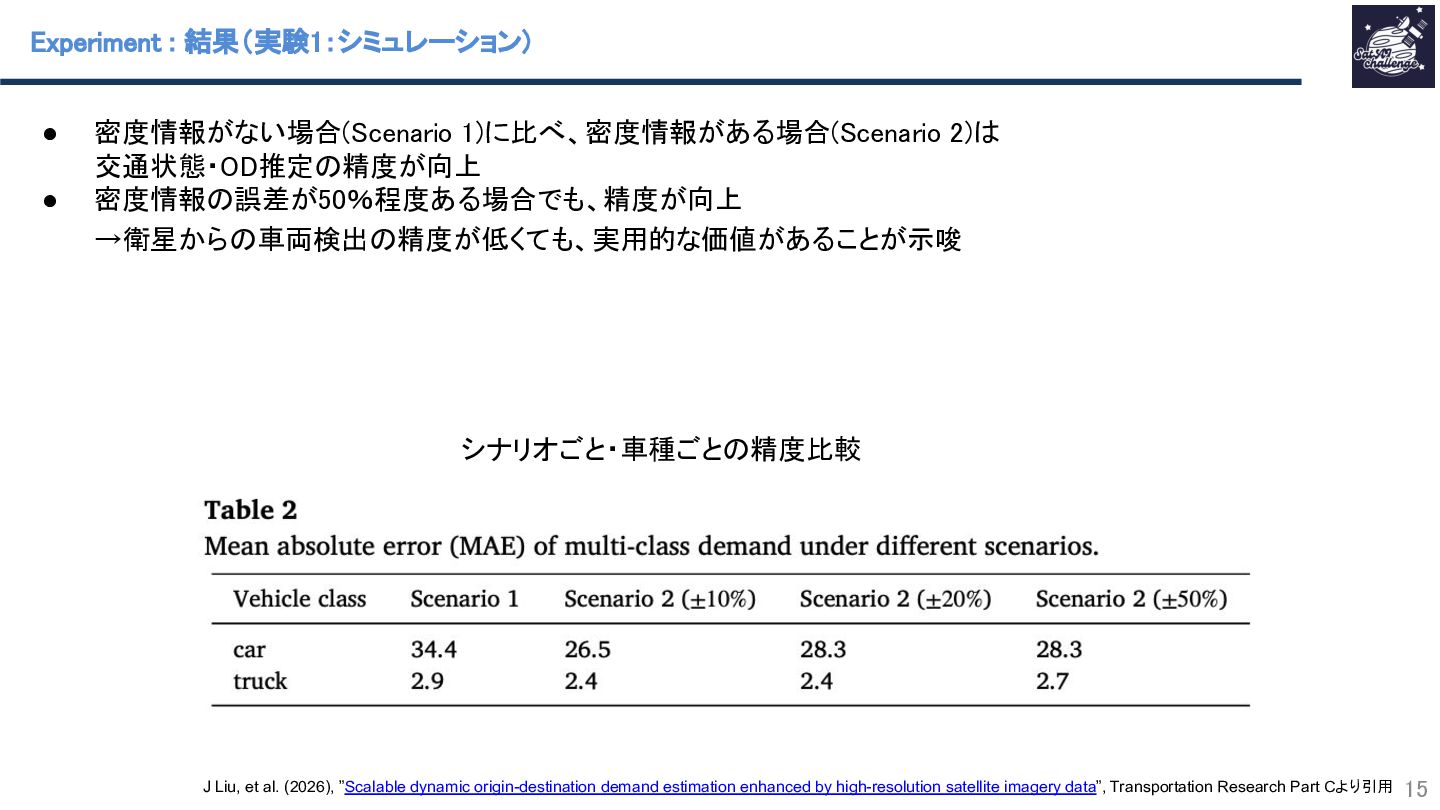
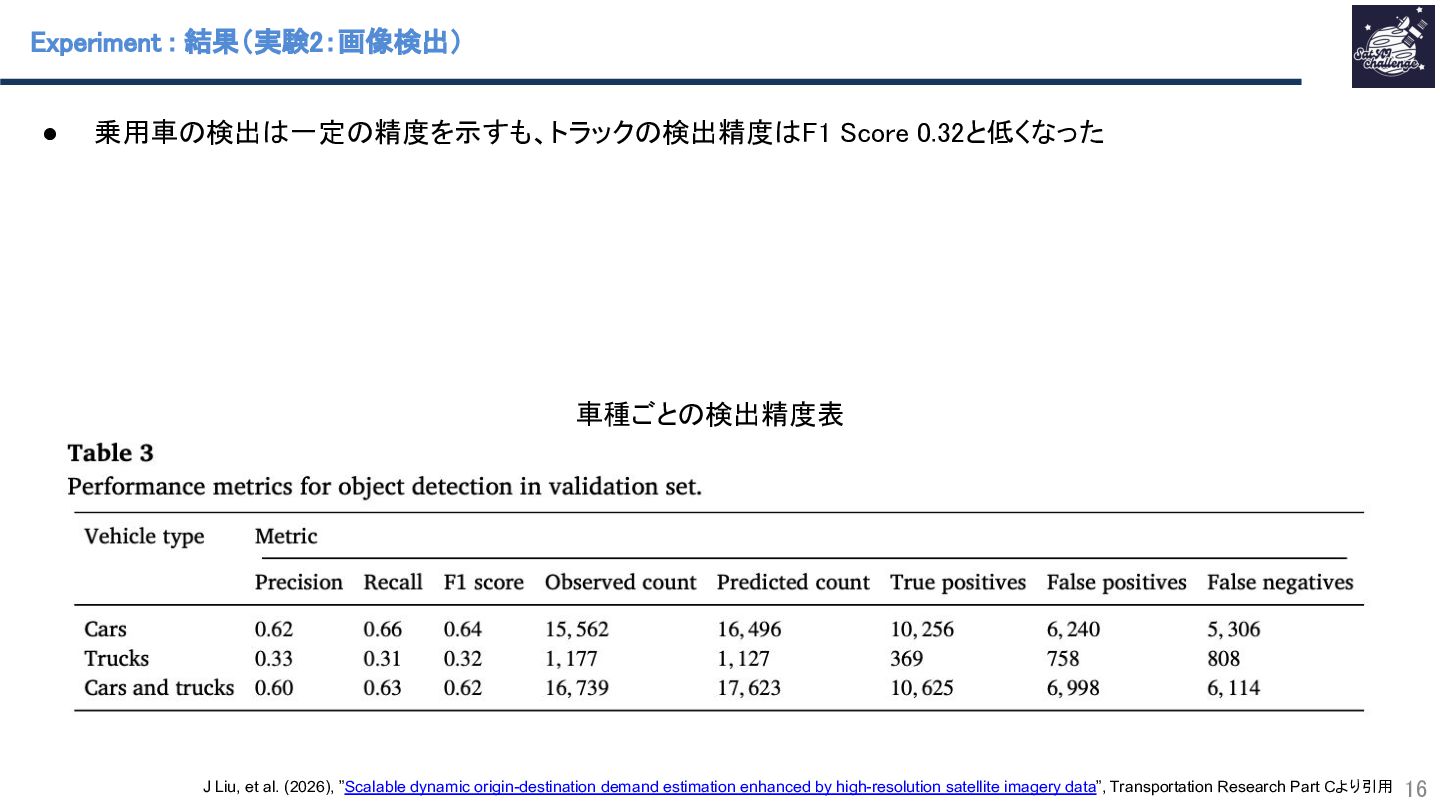
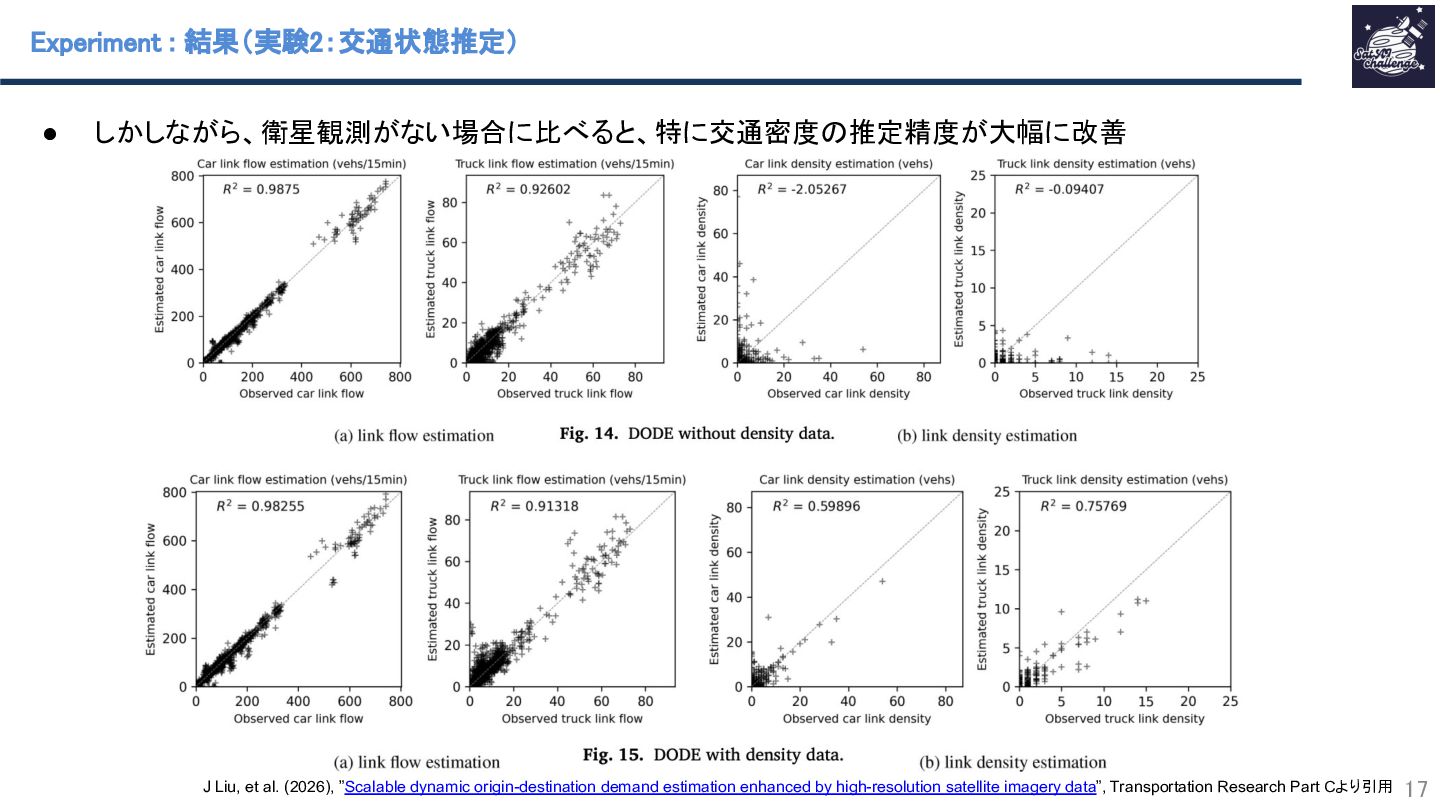
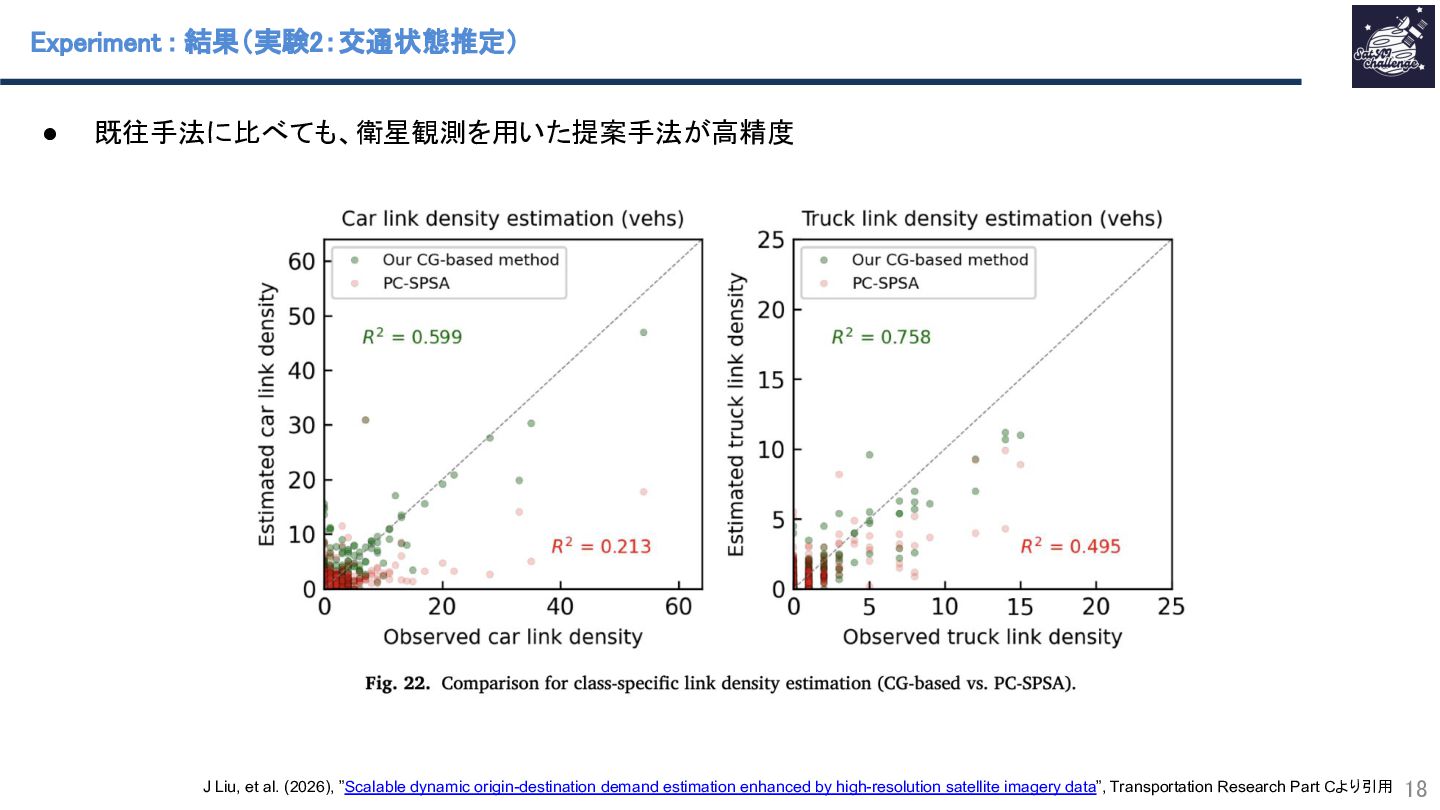
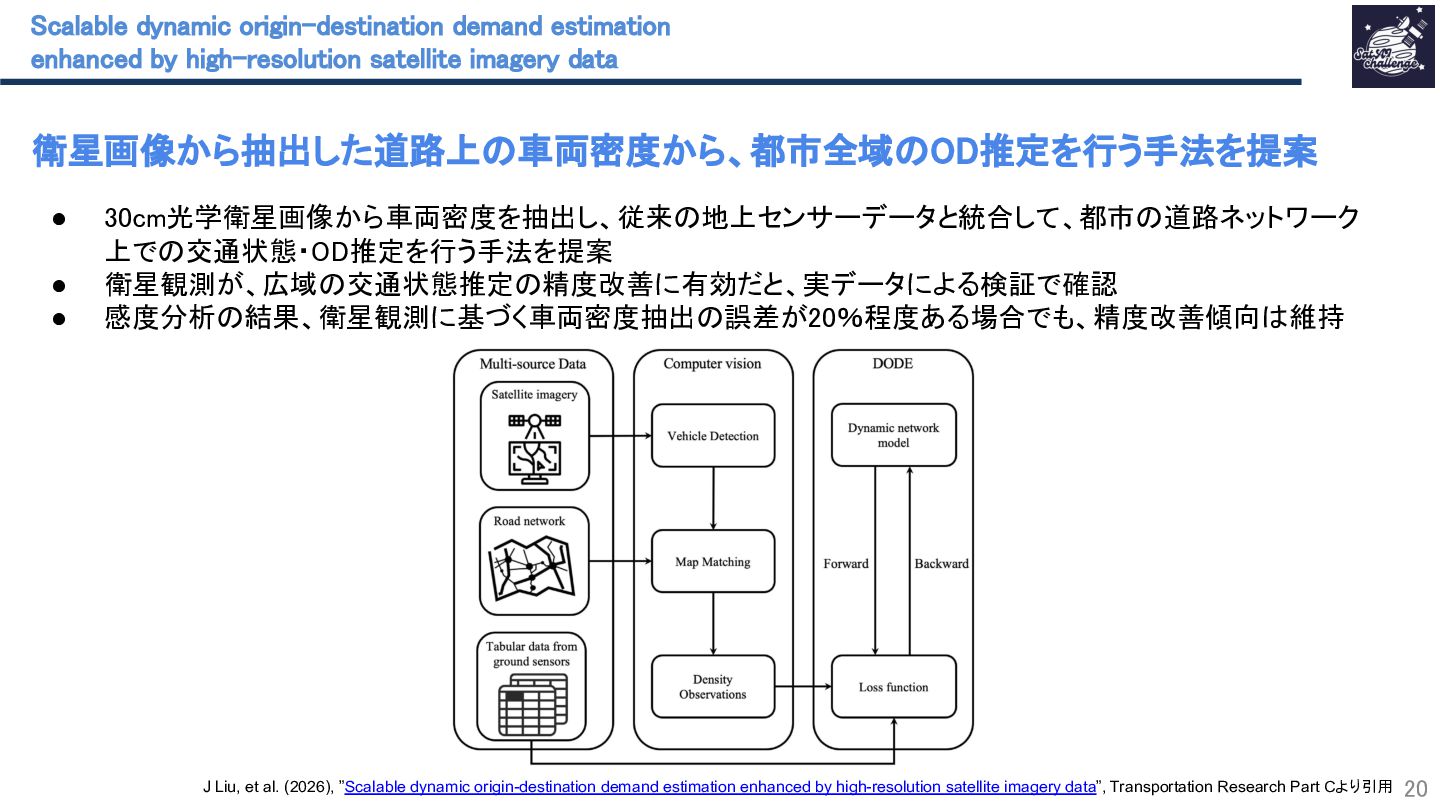
本研究では、高解像度衛星画像から抽出した車種別交通密度を、従来の地上センサーデータと統合し、都市規模の動的OD需要推定(DODE)の精度を向上させるフレームワークを提案しています。従来のDODEは空間的カバレッジが限定的な固定検知器等に依存し、センサー未設置区間の推定が不安定であることが課題でした。本手法では、Faster R-CNNによる衛星画像からの車両検出で都市全域の道路車両密度を抽出し、交通量・旅行時間とは独立な観測制約としてOD推定を行います。ピッツバーグ市街地(3,548リンク)での実験では、密度制約の追加により車両密度の再現性がR²負値から0.6〜0.76へ改善され、合成データでの感度分析では、衛星からの密度推定の誤差が±50%ある場合でも、OD推定の精度が改善することが確認されました。今後、衛星撮像頻度の向上に伴い、都市交通モニタリングへのさらなる展開が期待されます。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Method : Map Matching 11 • 検出車両の重心を、道路ネットワークデータにマップマッチング • 交通密度[veh/km/lane]を得る Map](https://files.speakerdeck.com/presentations/bf038808f9564d67b525c687ab9a43a3/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}