本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
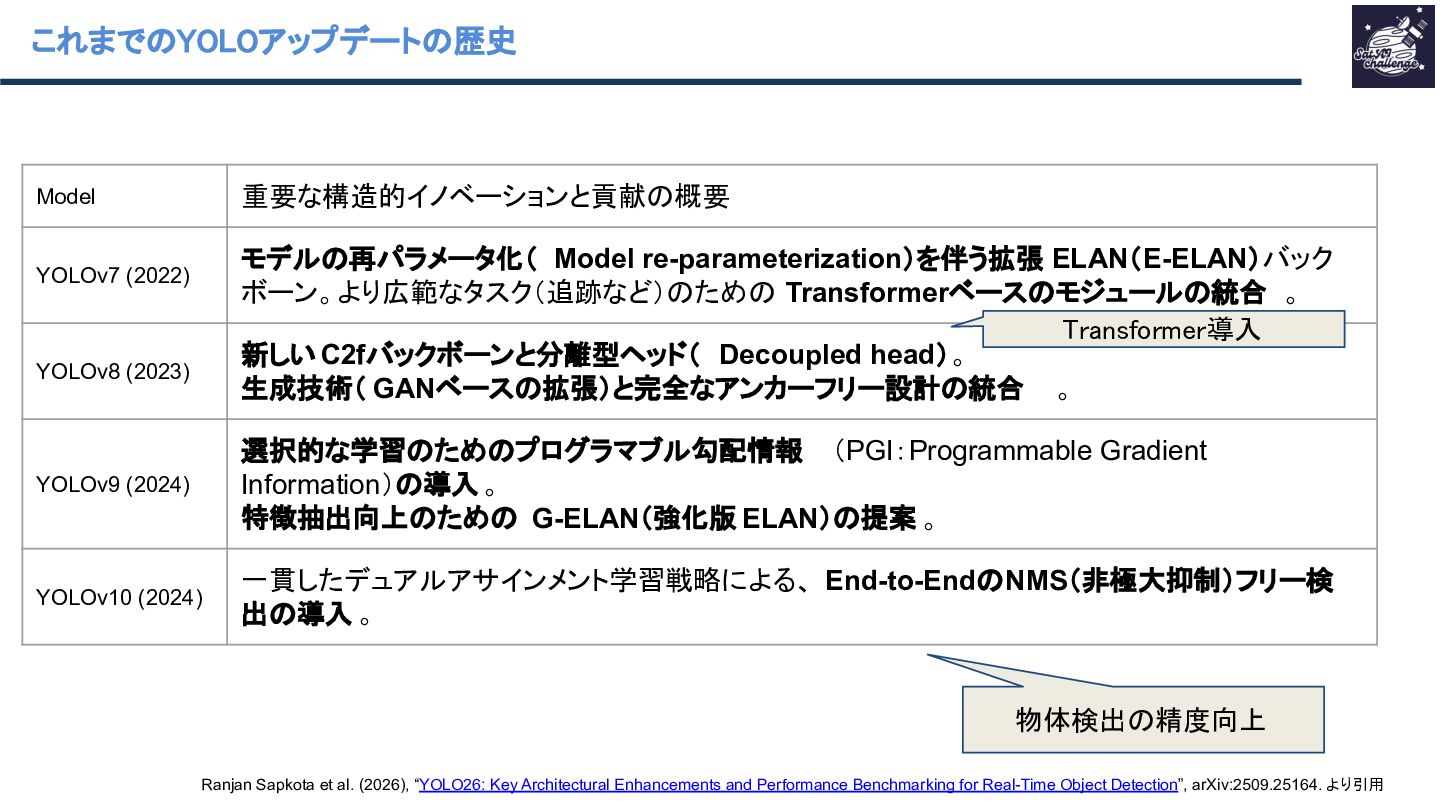
紹介する論文は、「YOLO26_ Key Architectural Enhancements and Performance Benchmarking for Real-Time Object Detection」です。
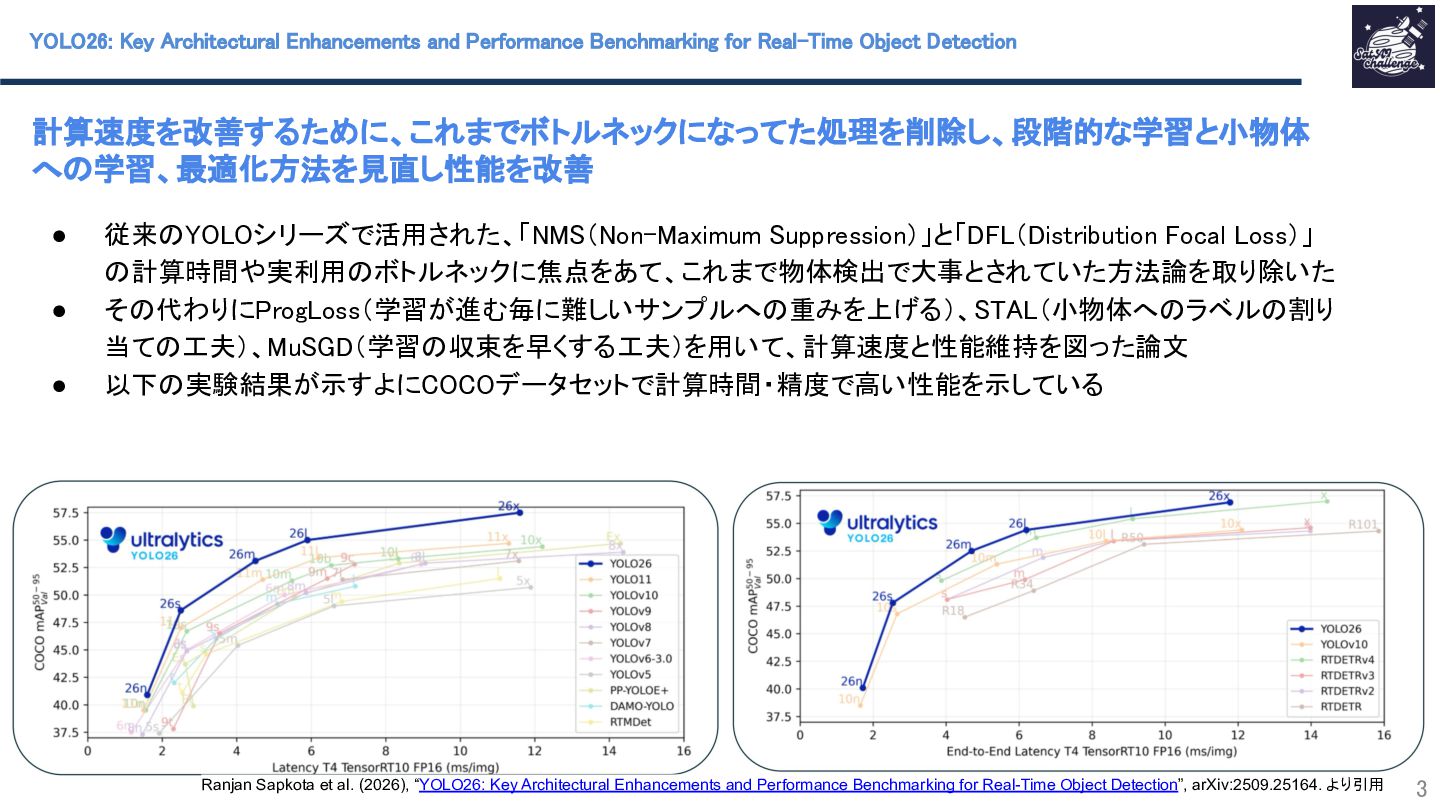
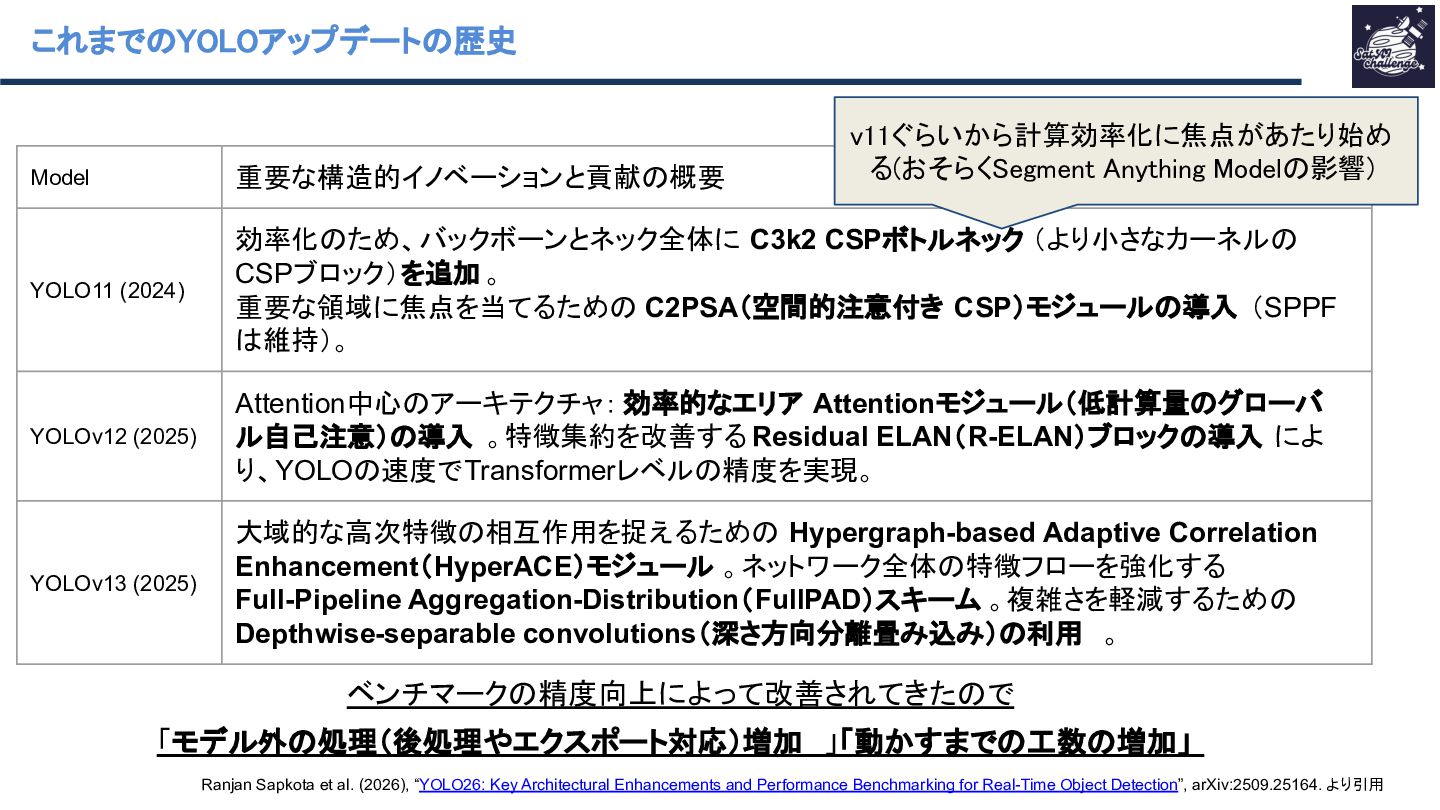
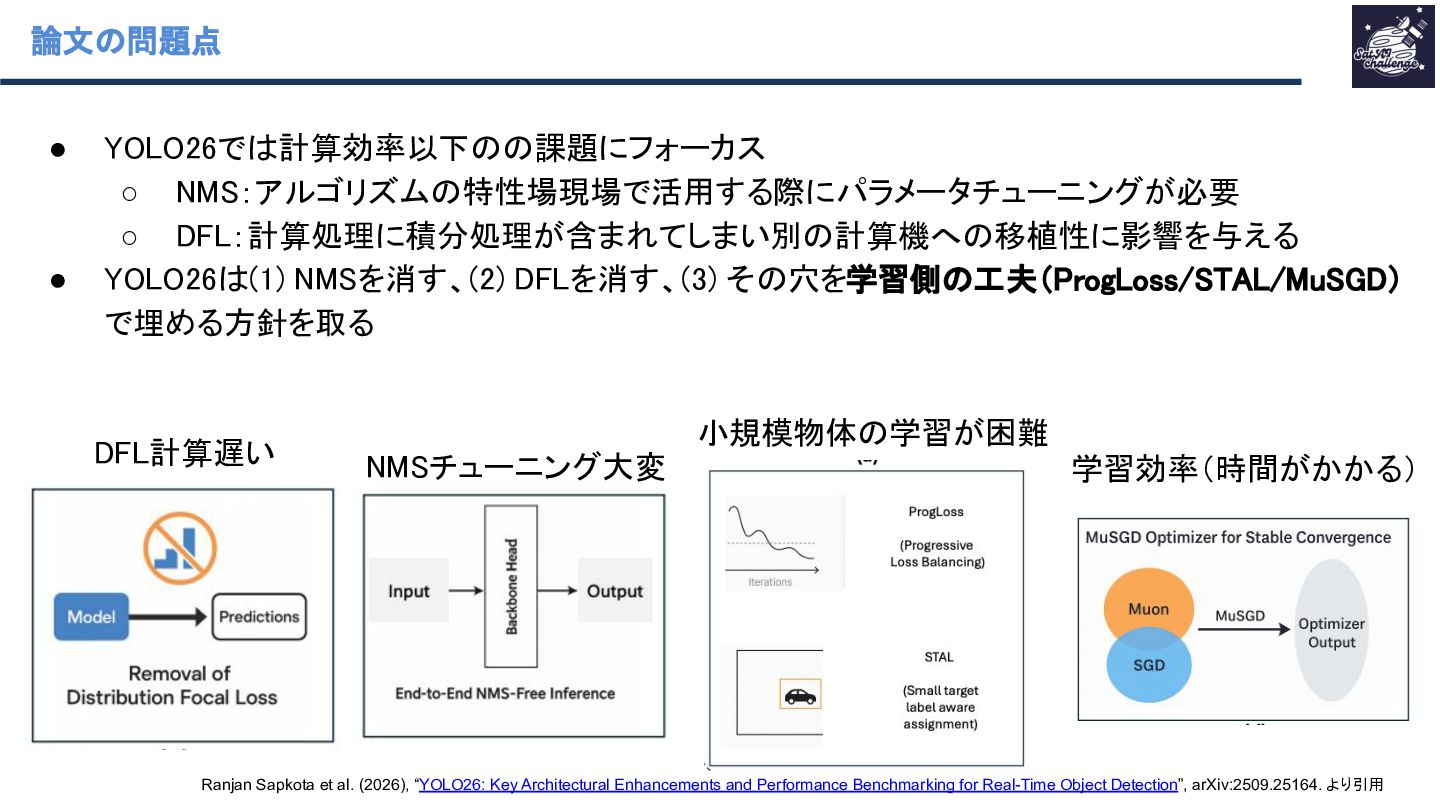
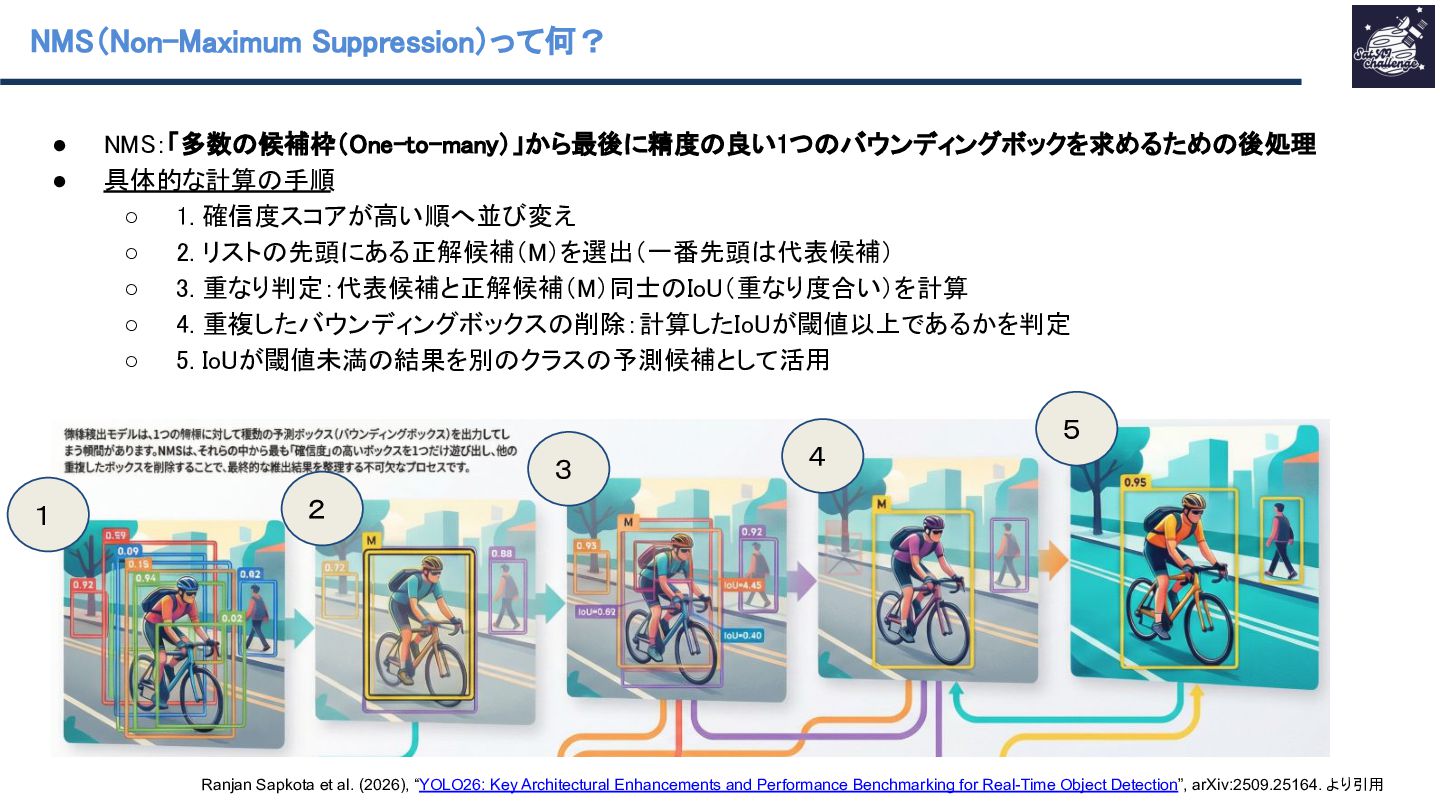
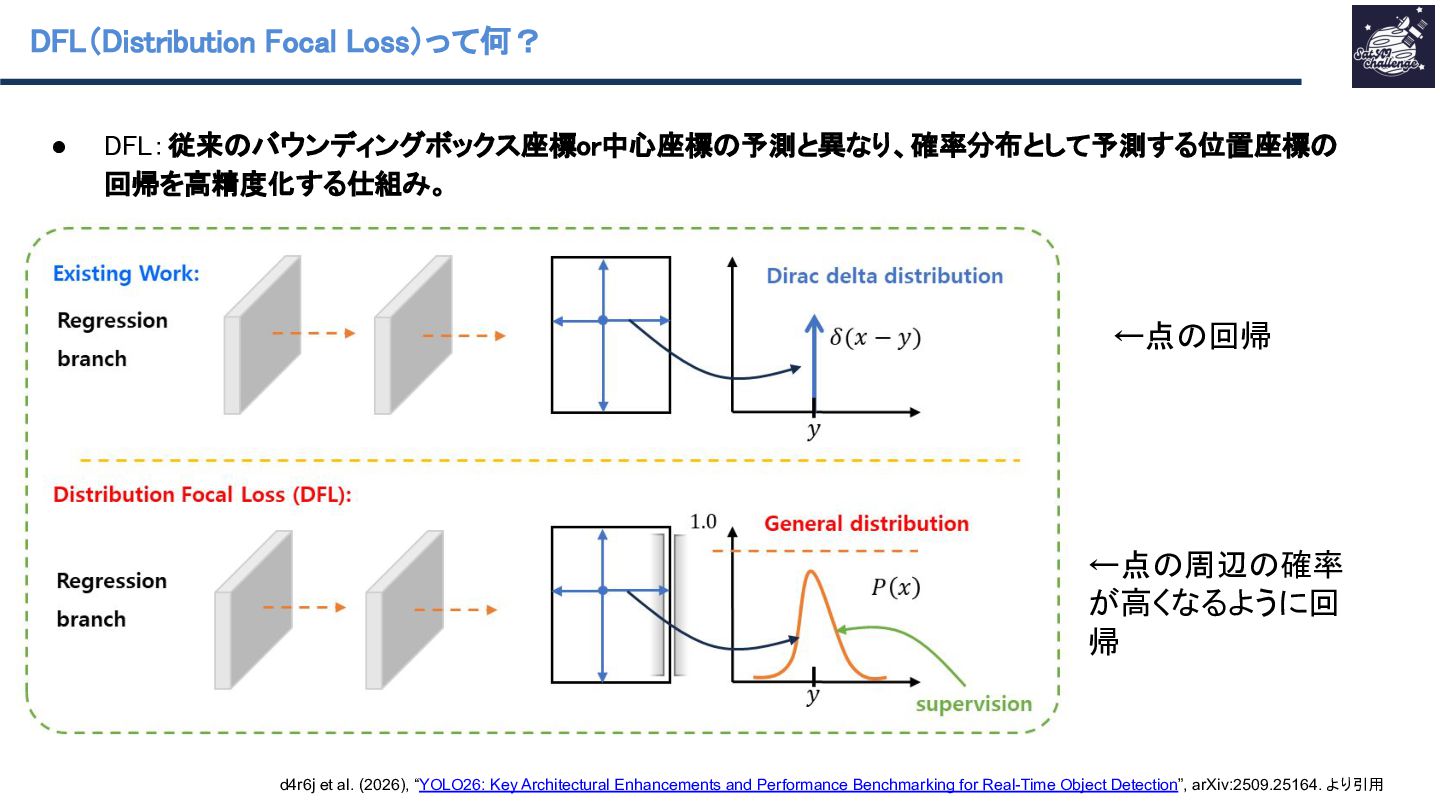
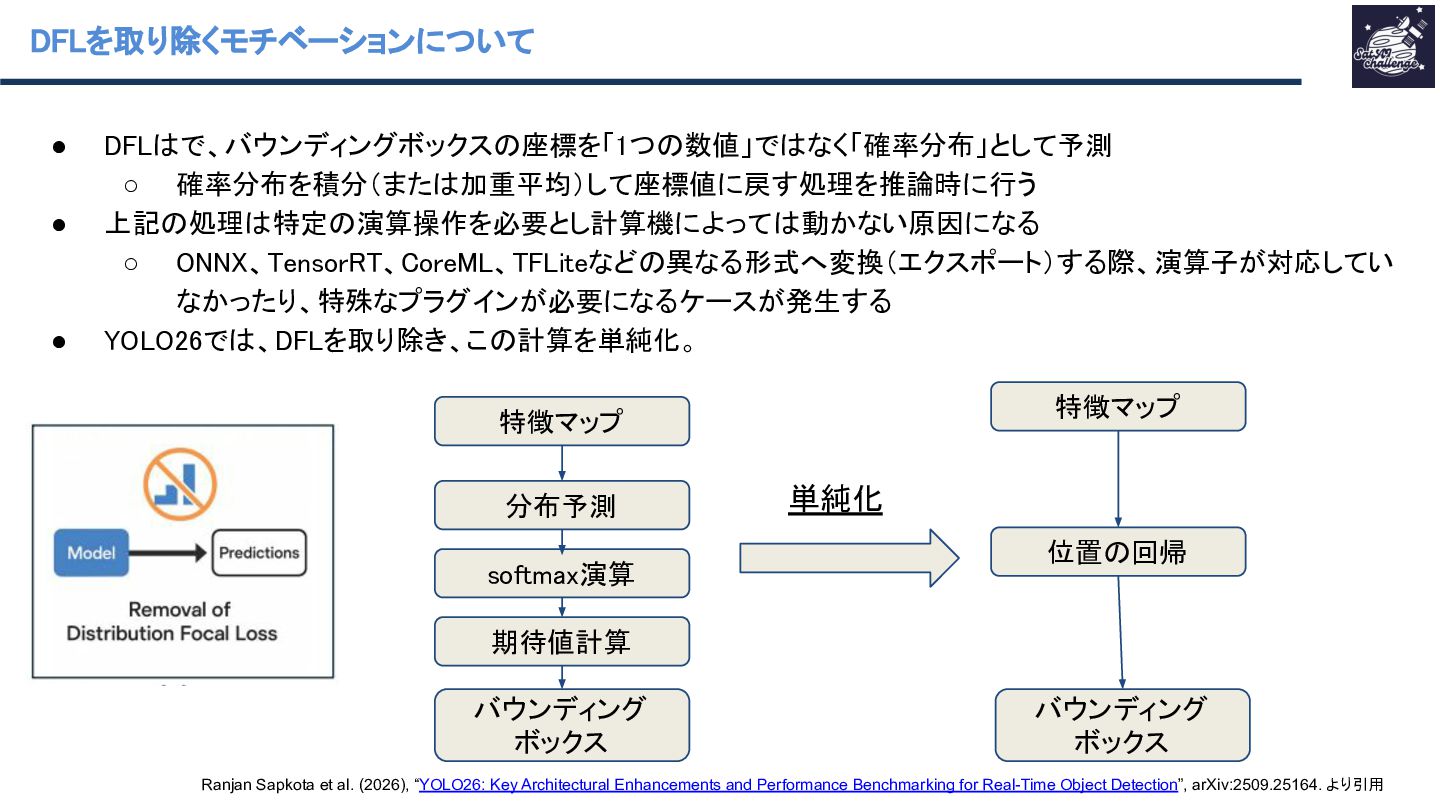
従来OLOシリーズで活用された、「NM(Non-Maximum uppression)」と「DFL(Distribution Focal Loss)」
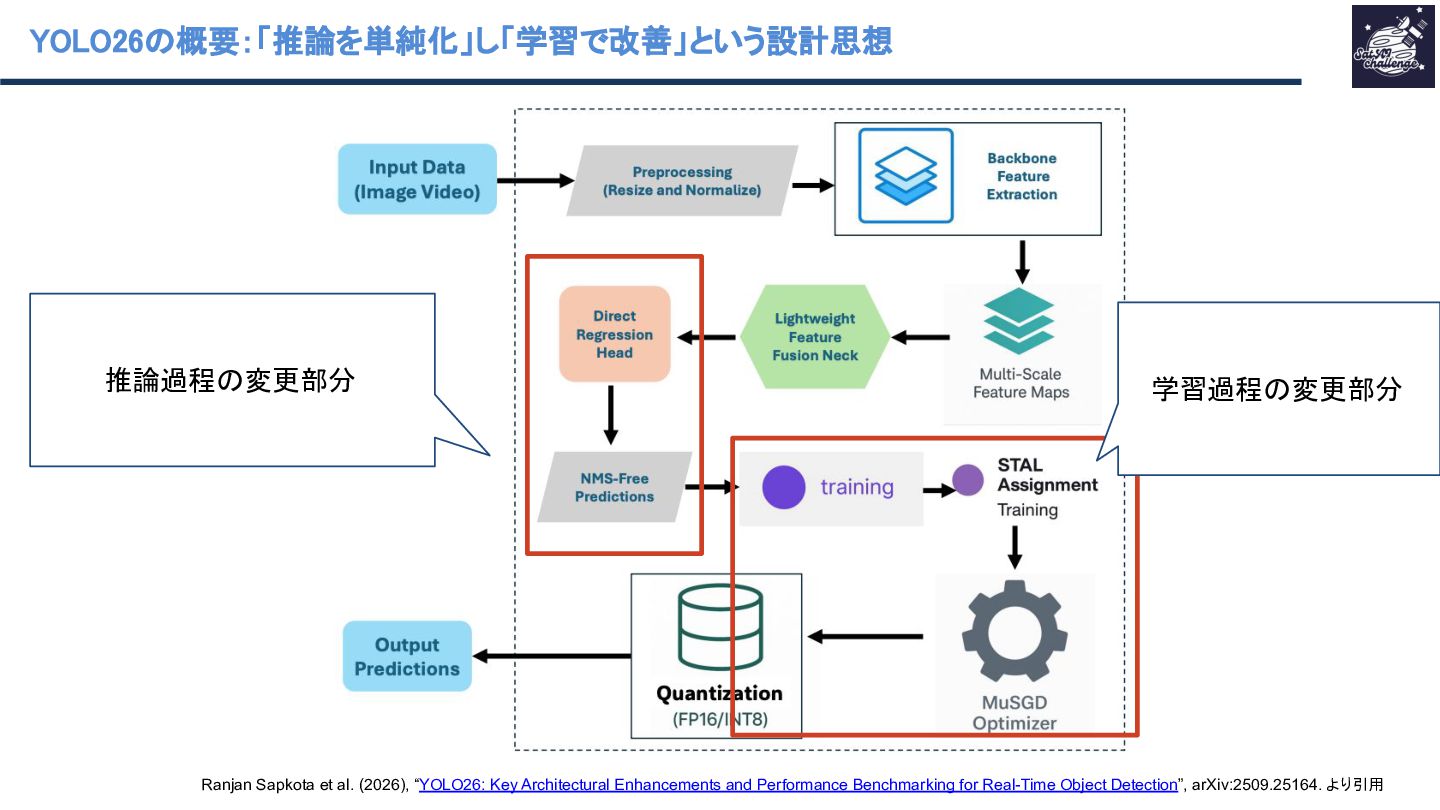
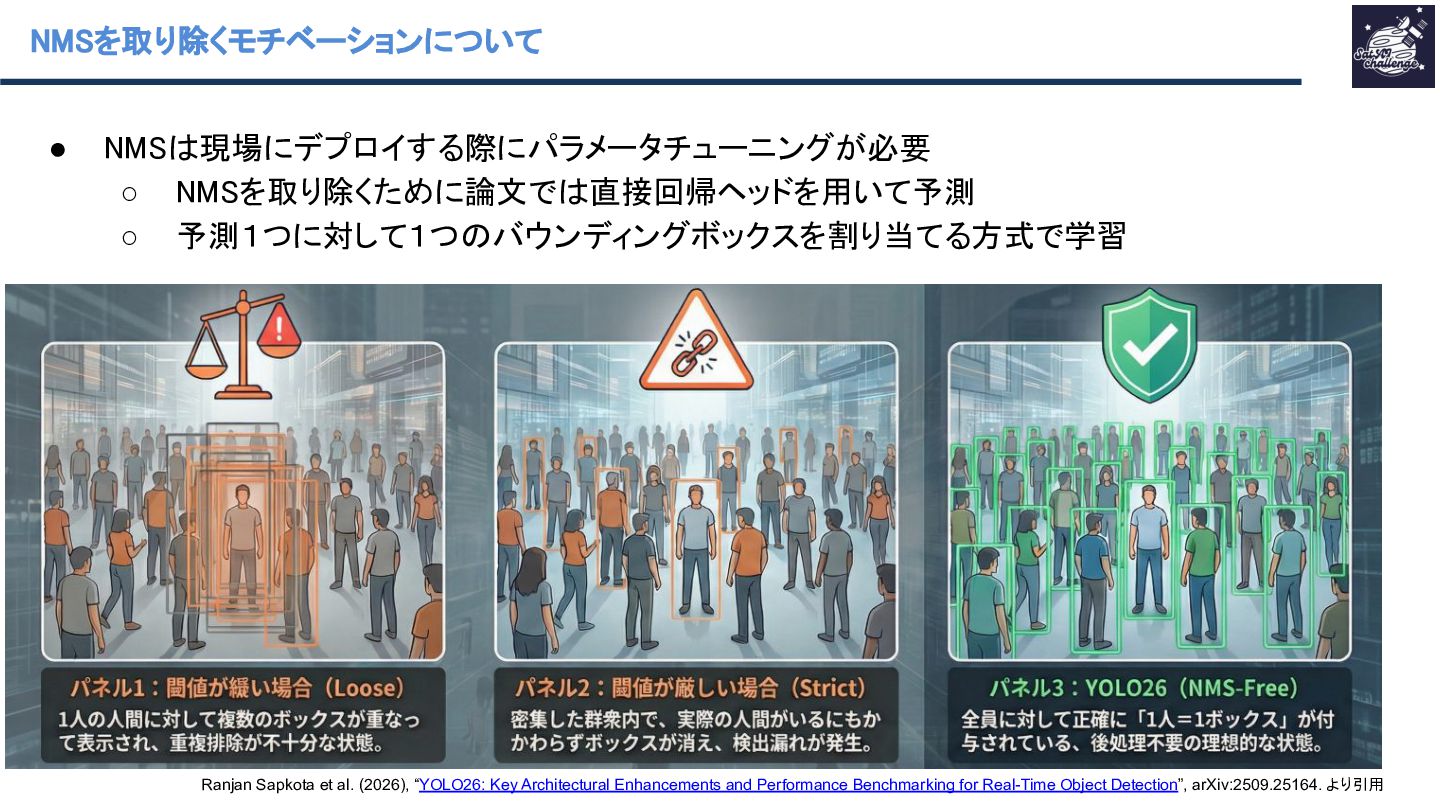
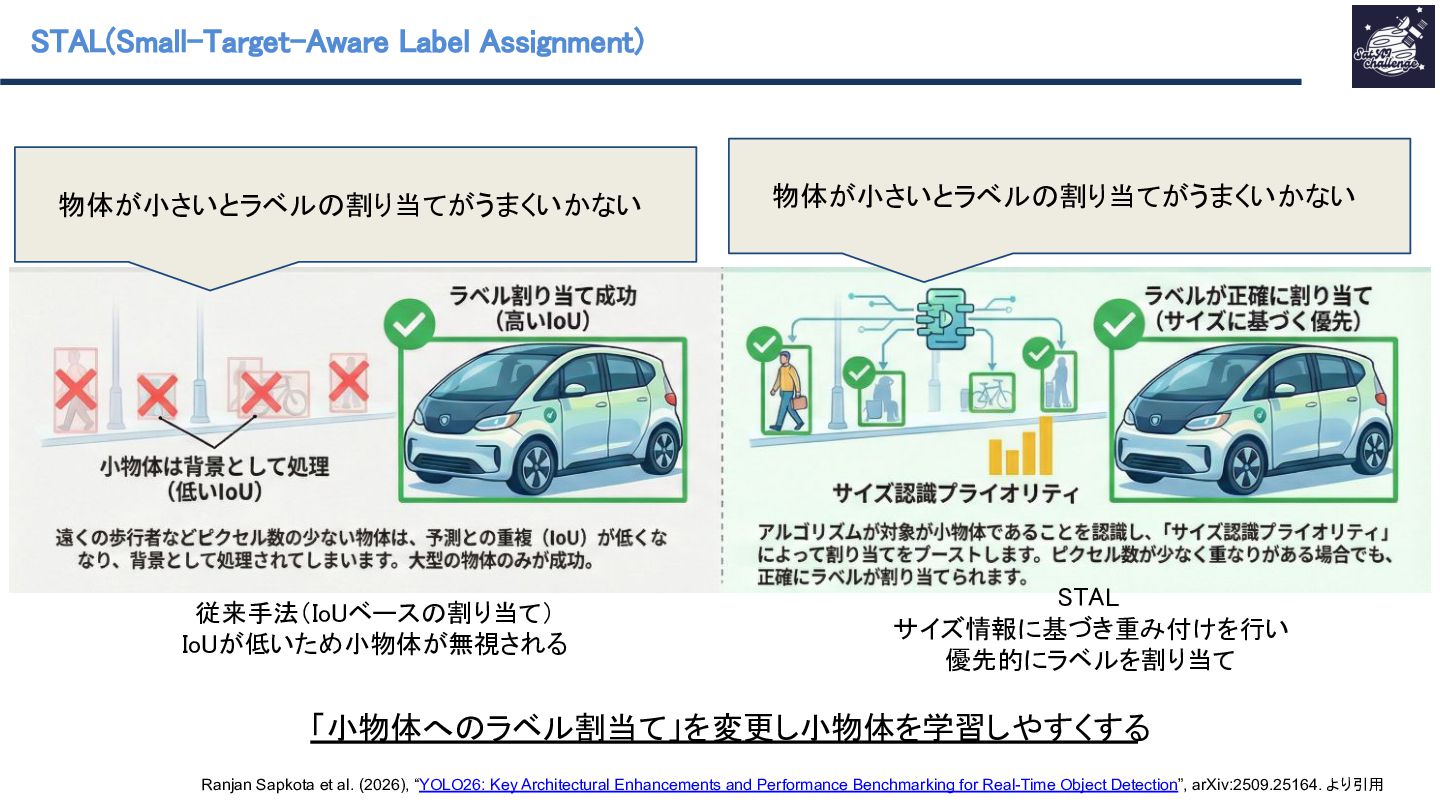
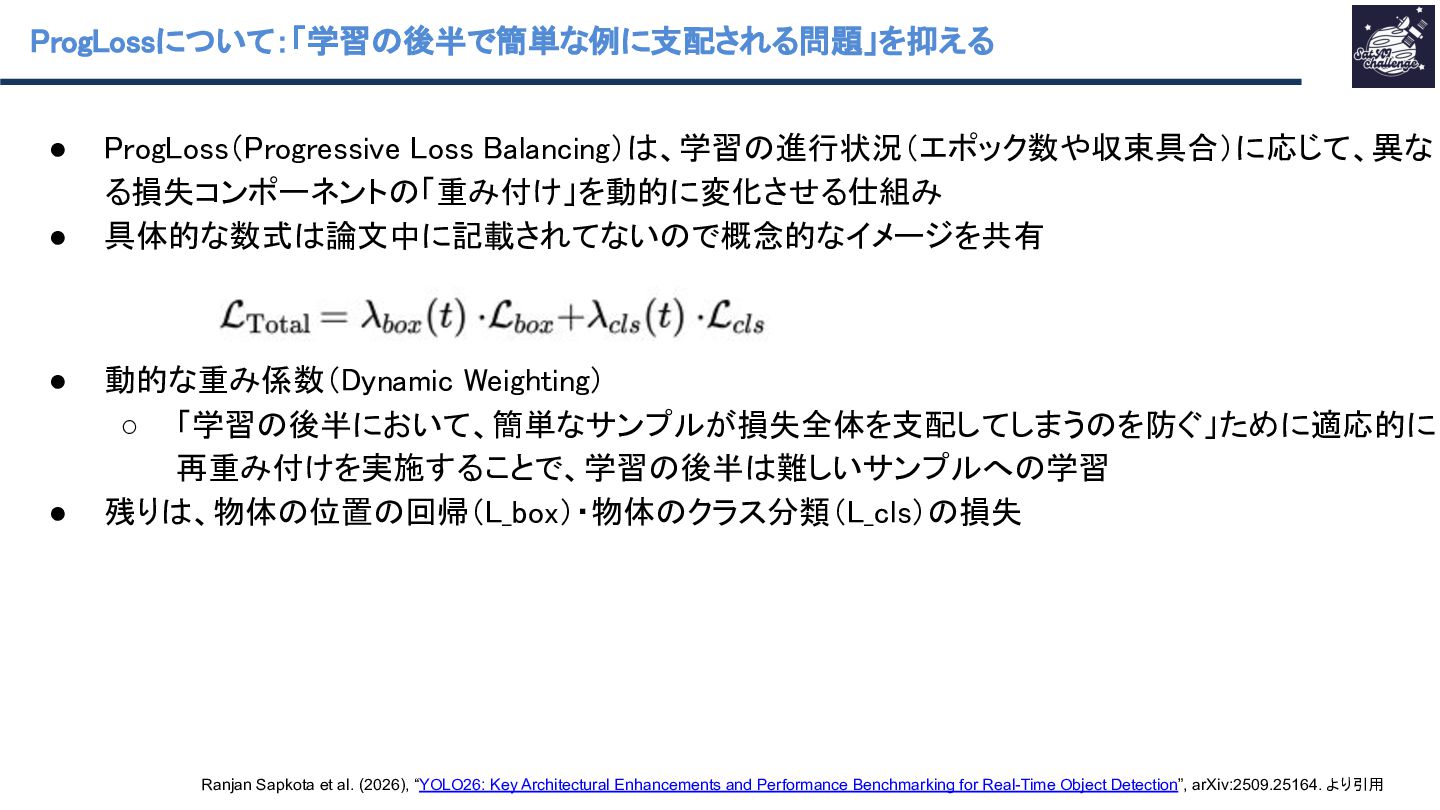
が計算時間と実利用に置いてボトルネックになっていました。そこで、この論文ではProgLoss(学習が進む毎に難しいサンプルへ重みを上げる)、AL(小物体へラベル割り当て工夫)、MuGD(学習収束を早くする工夫)を用いて、計算度と性能維持を超えて性能の改善を行なっています。実験結果ではCOCOデータセットで計算時間・精度で高い性能を示しました。
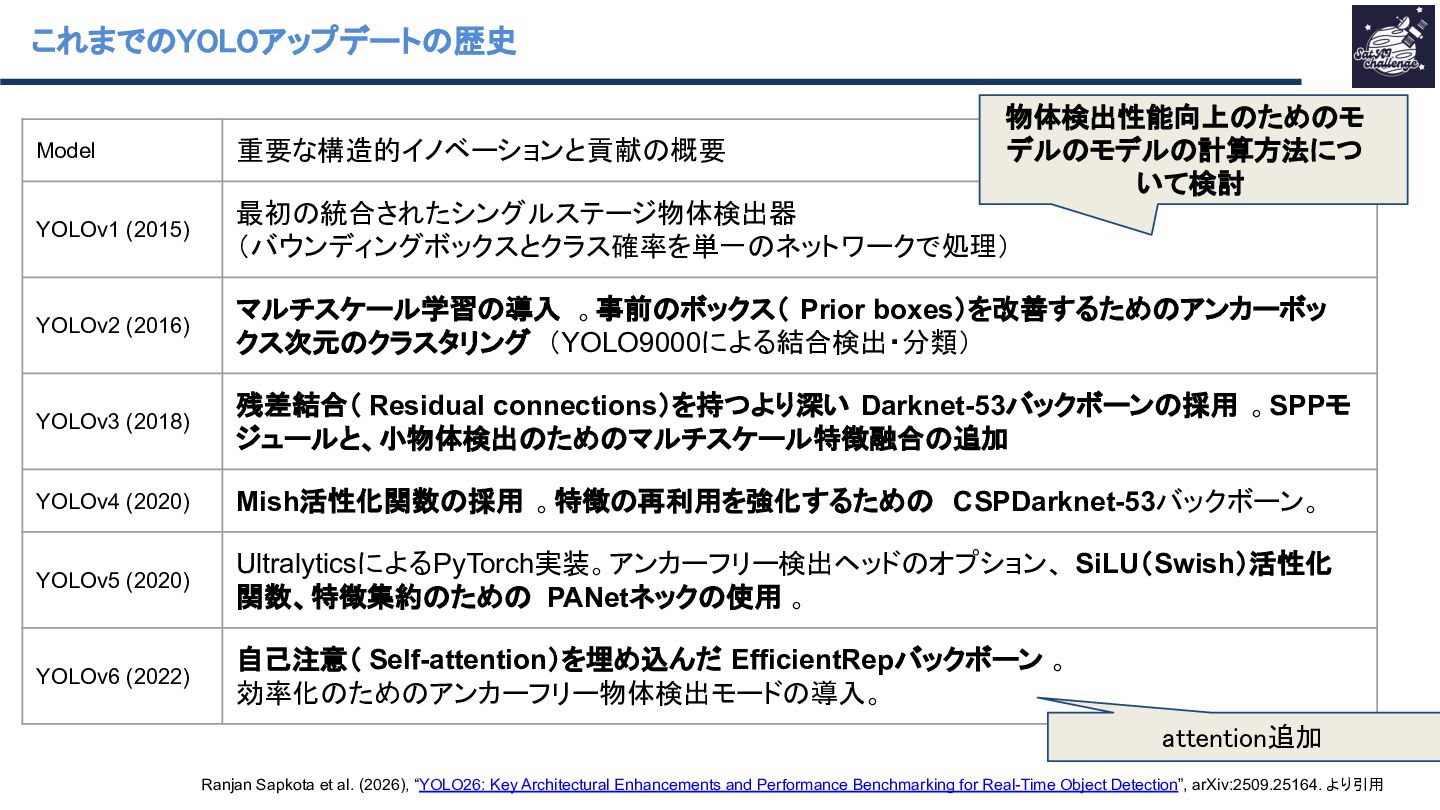
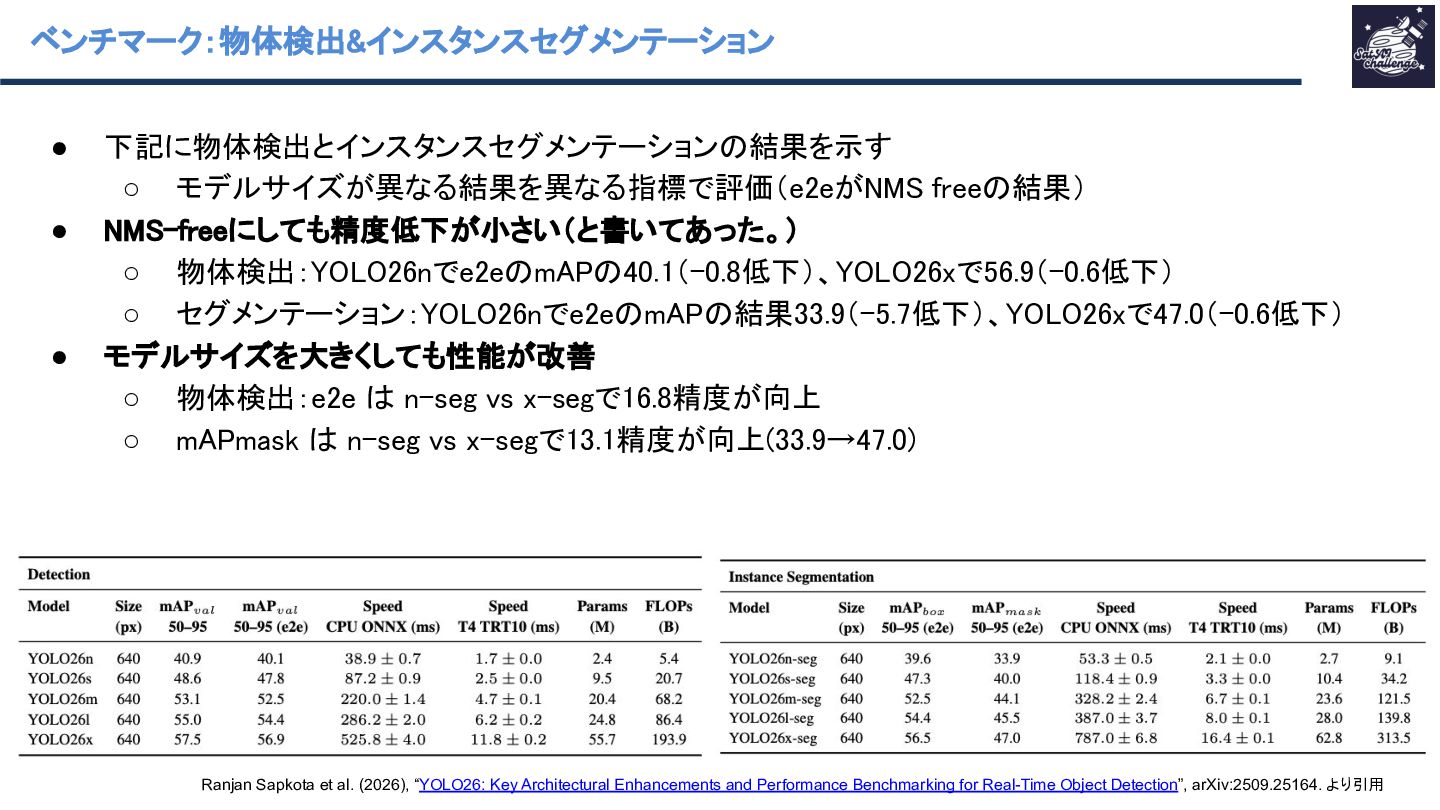
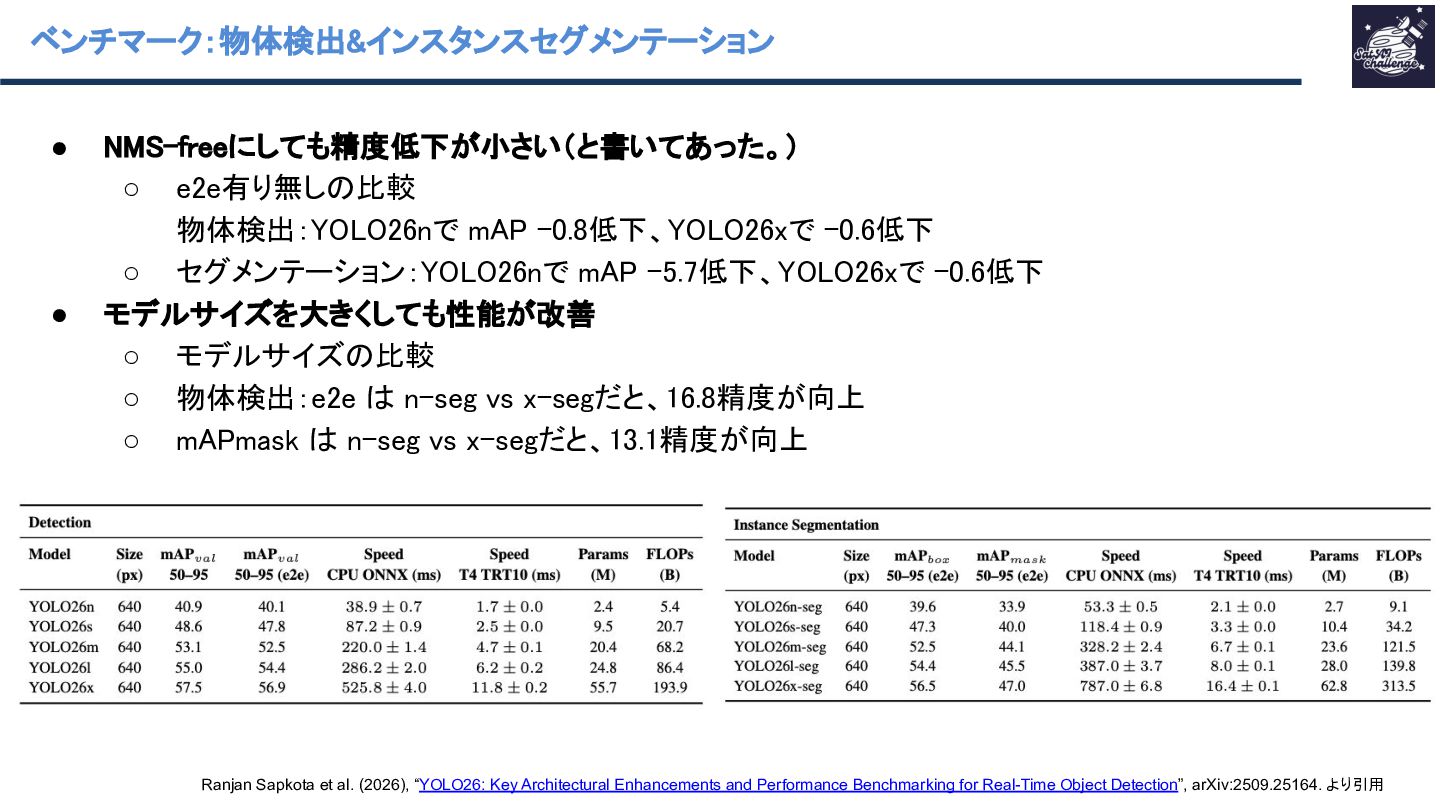
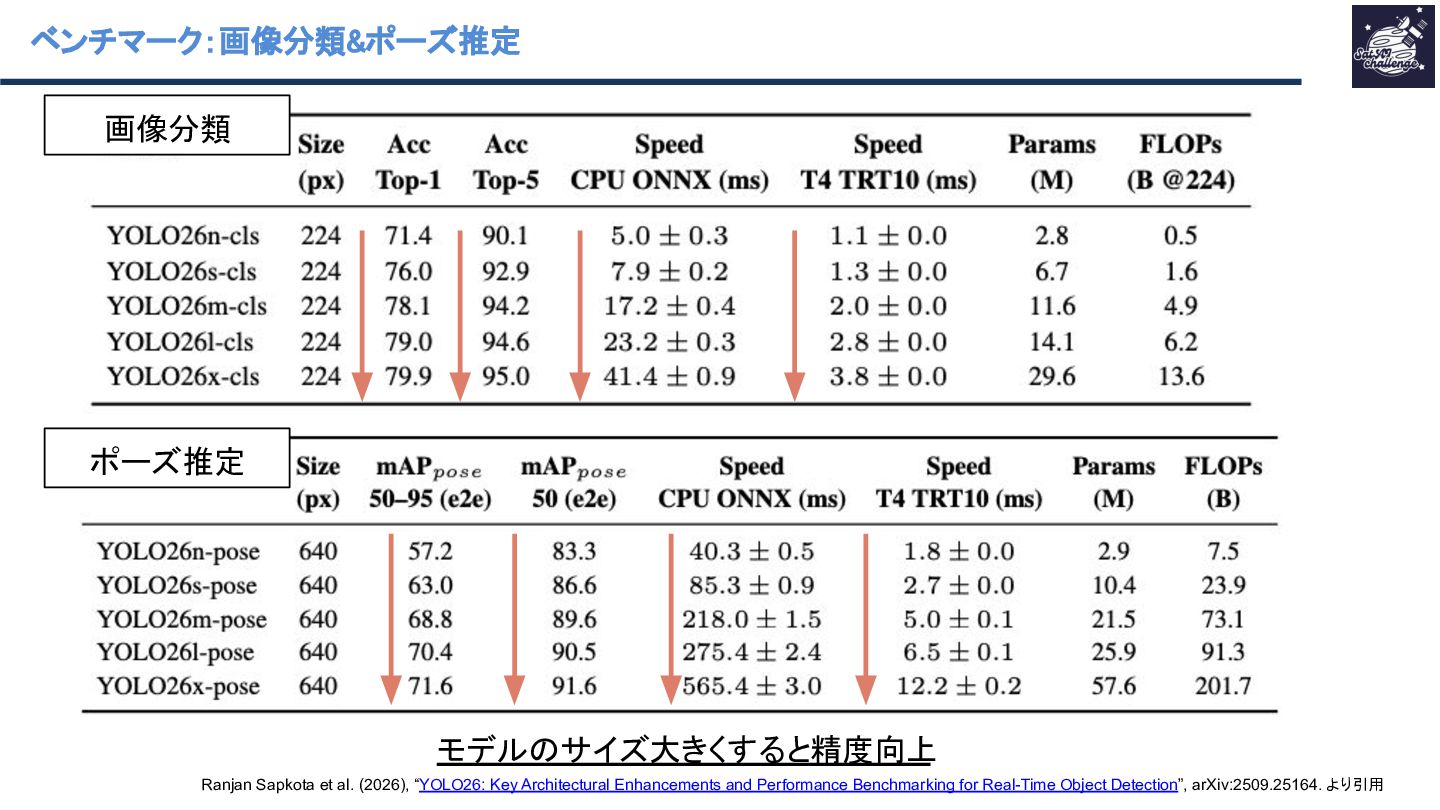
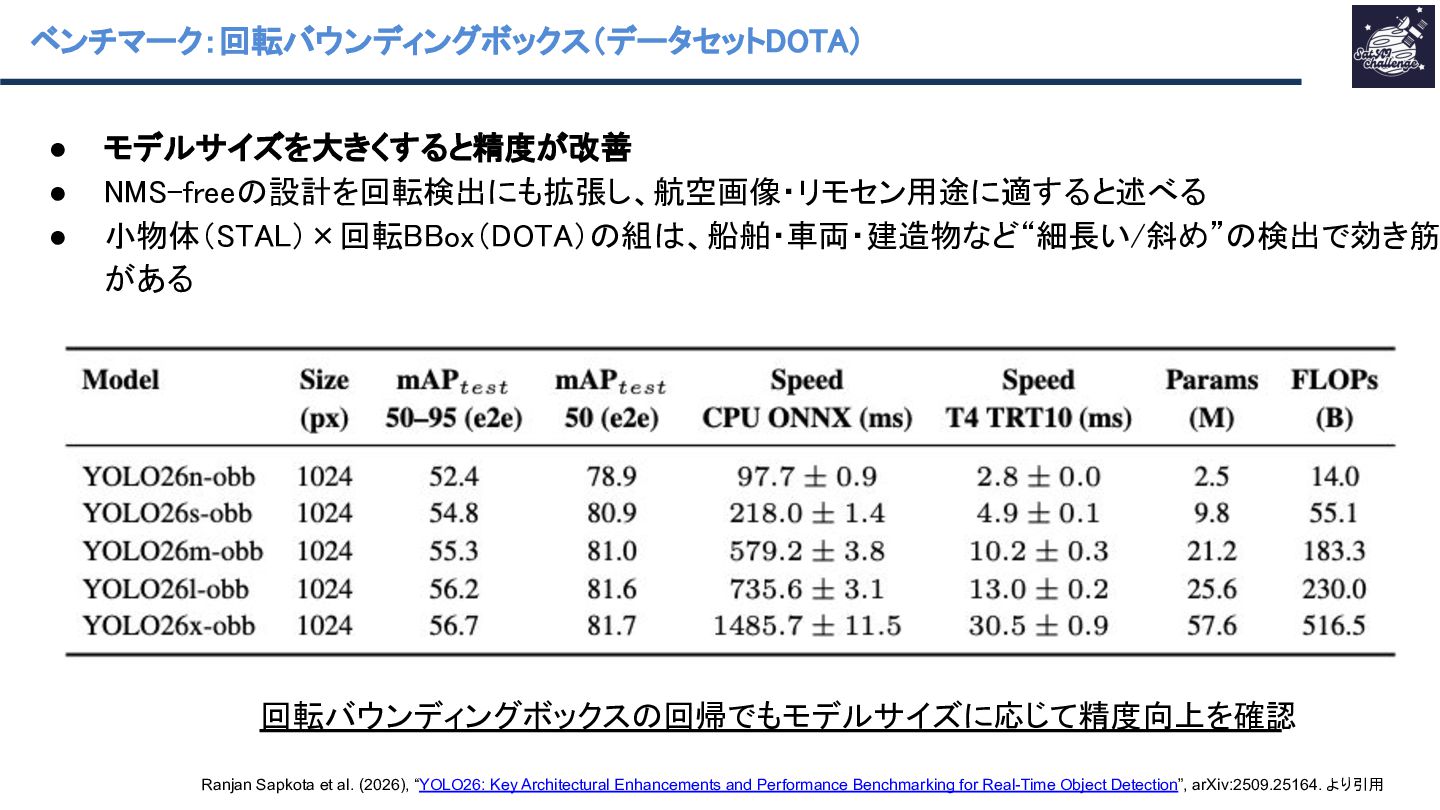
Ranjan Sapkota et al. (2026), “YOLO26: Key Architectural Enhancements and Performance Benchmarking for Real-Time Object Detection”, arXiv:2509.25164. より引用
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}