慣性航法の基礎と誤差蓄積問題から出発して、冷却原子と原子干渉計を用いた量子航法がどのようにGPSの限界を超えうるかを解説します。
取り扱う内容:
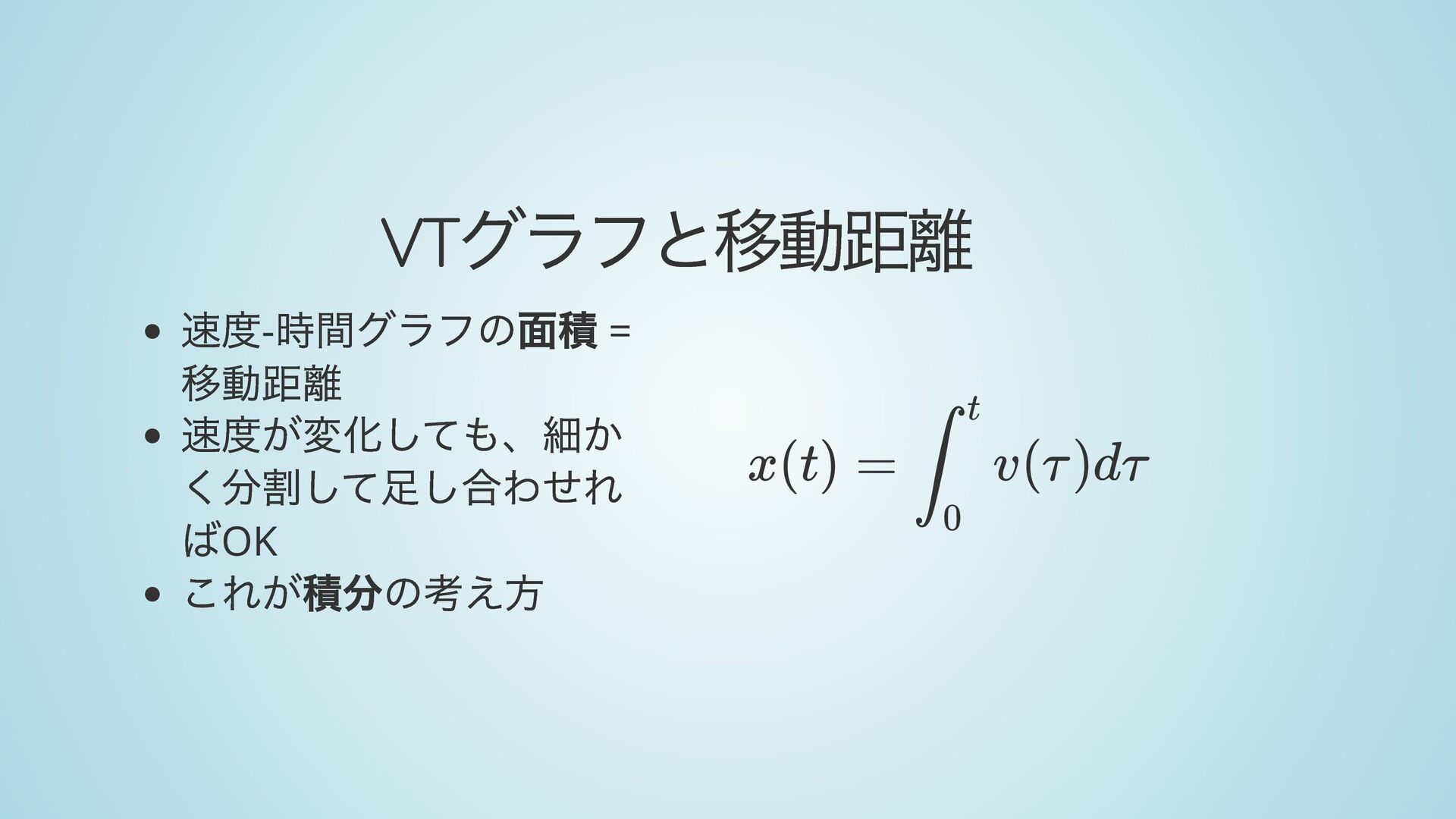
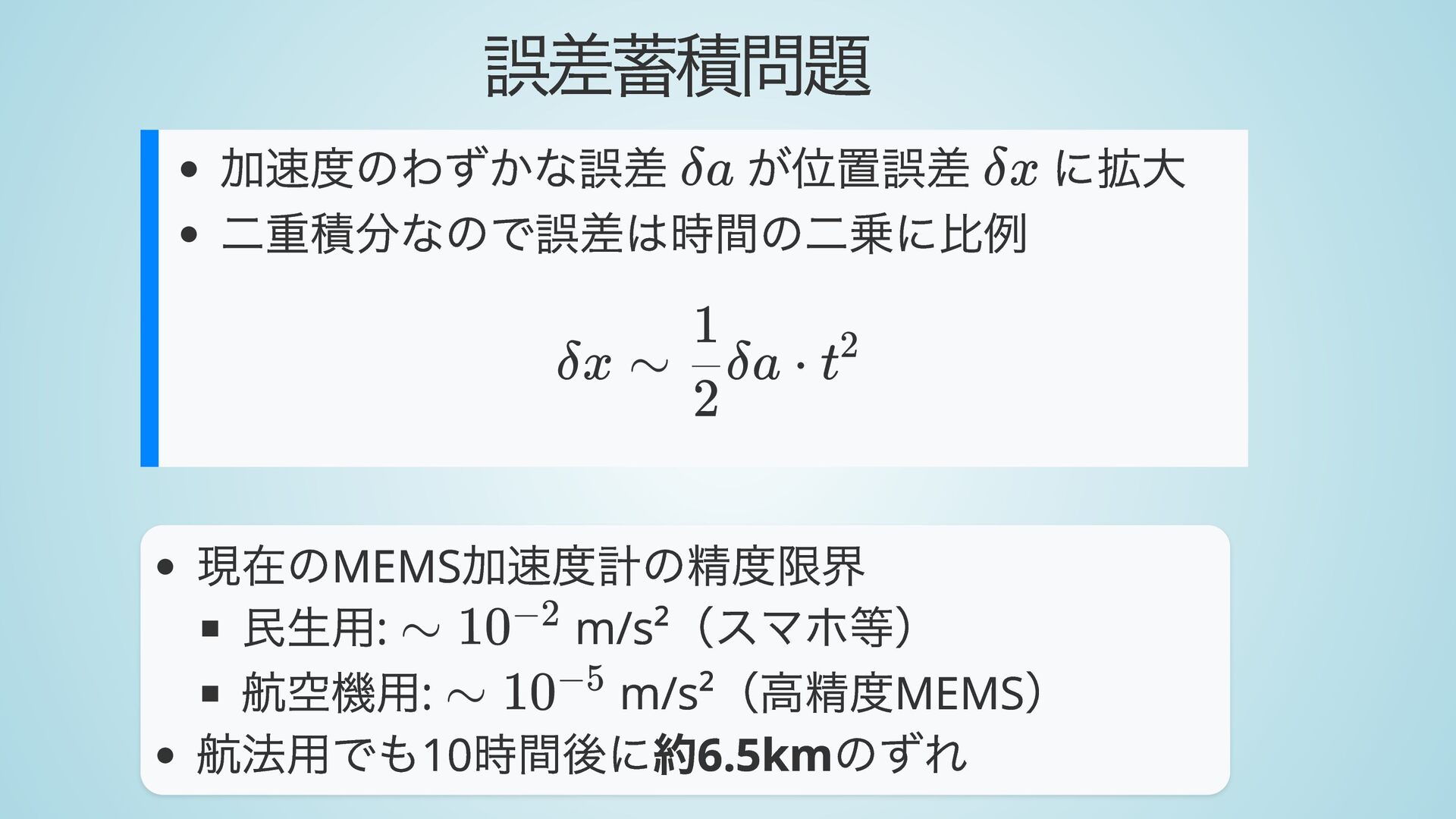
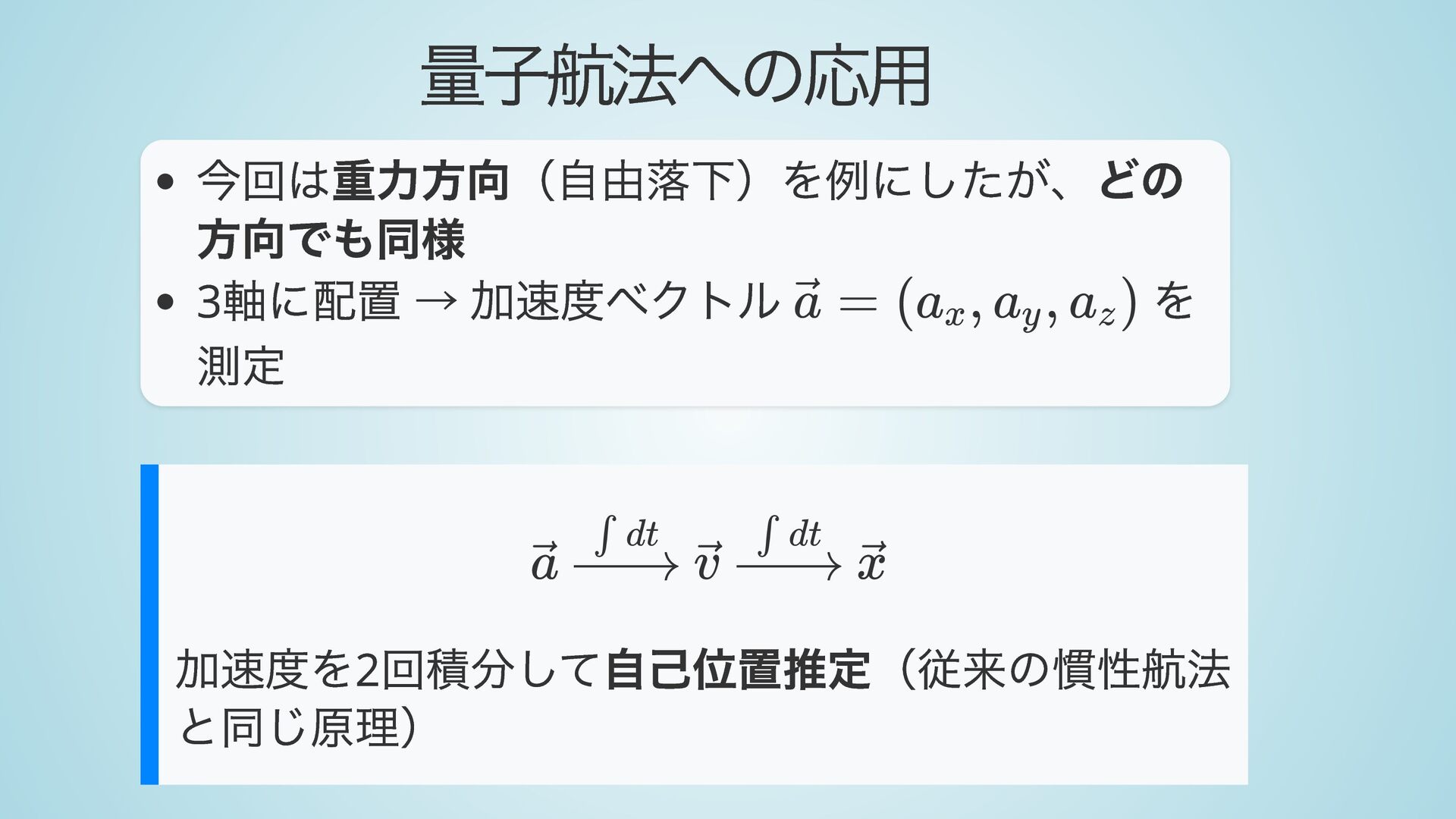
・ 慣性航法の原理と誤差蓄積問題(二重積分による位置誤差の拡大)
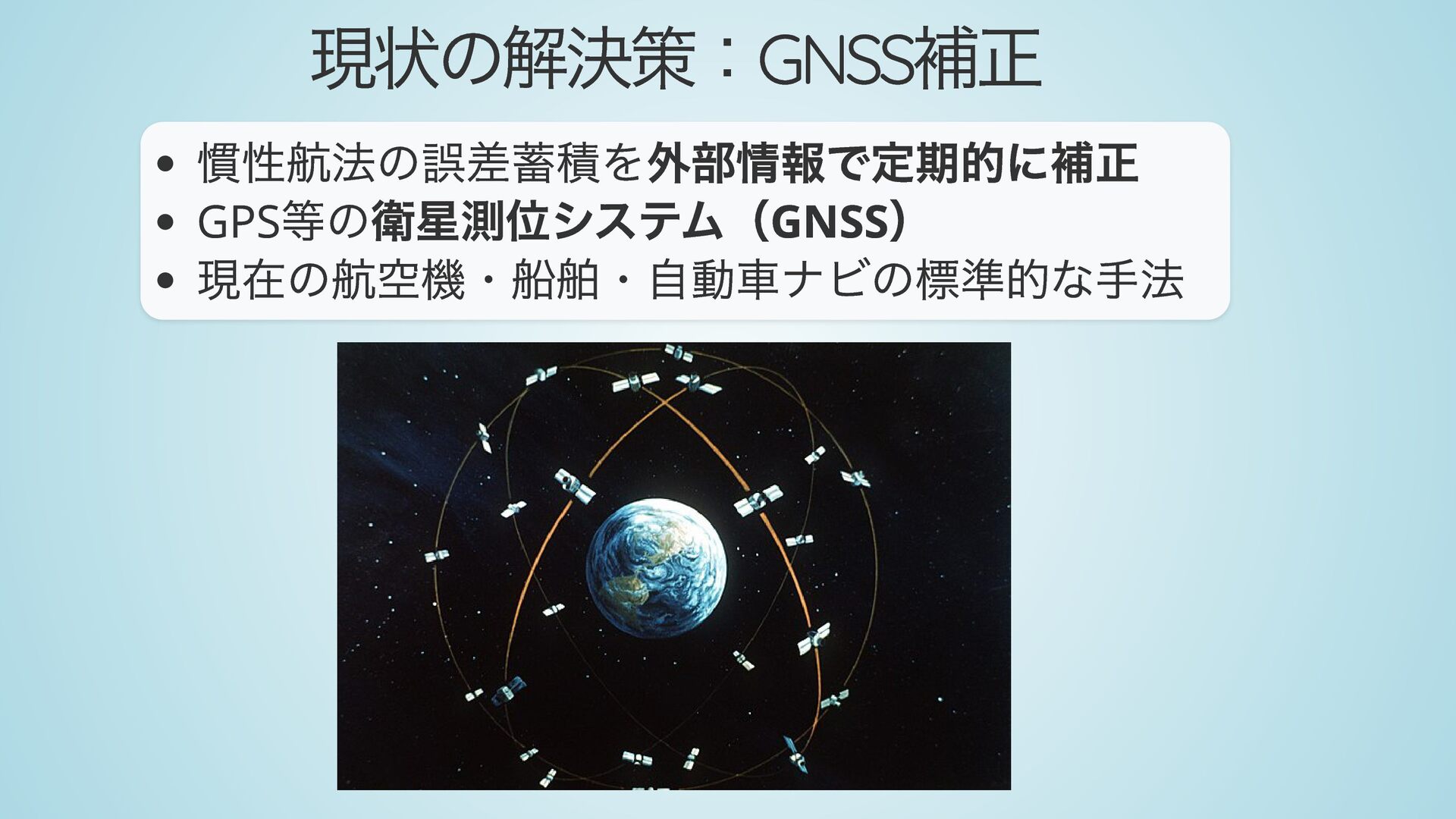
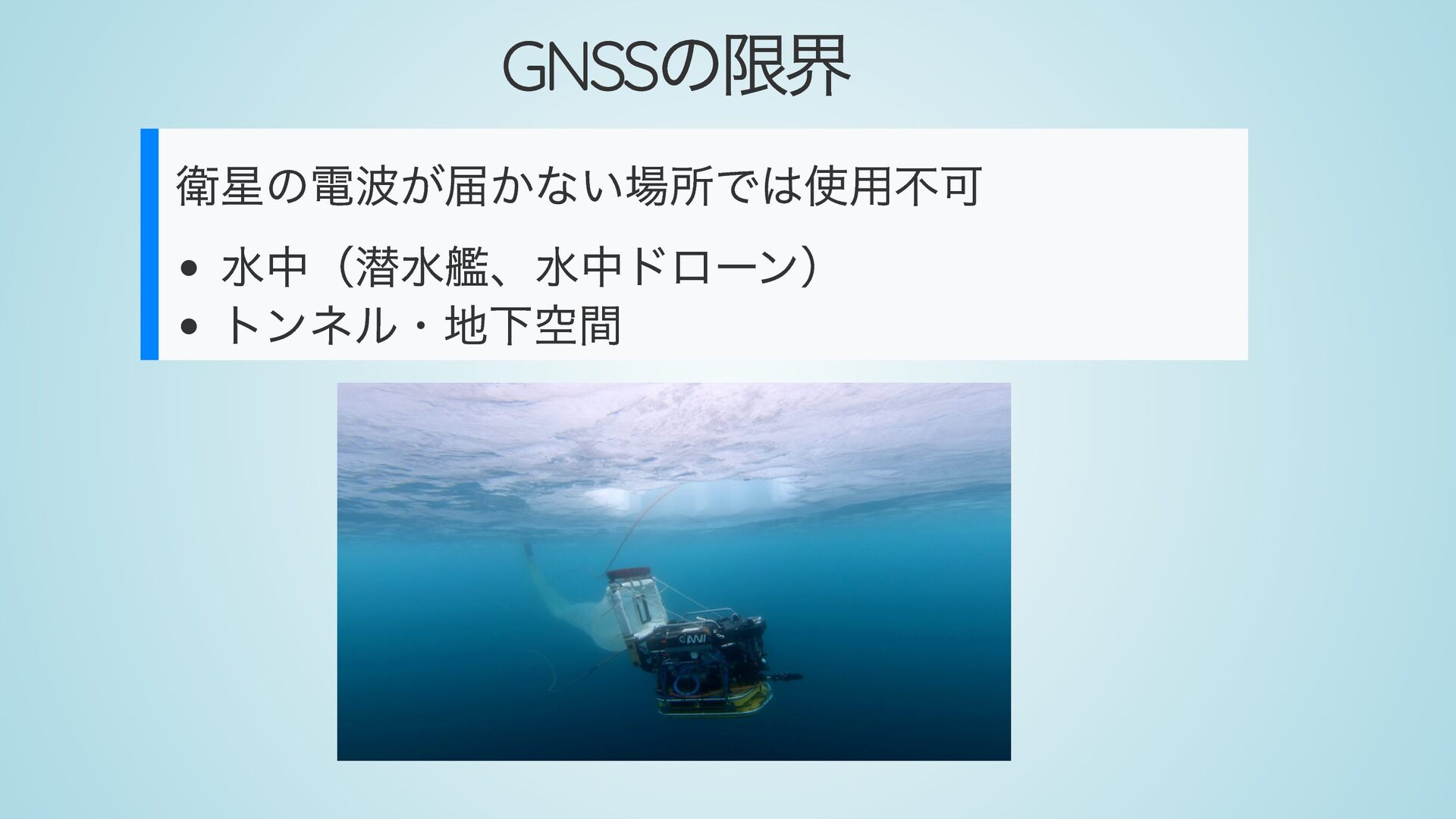
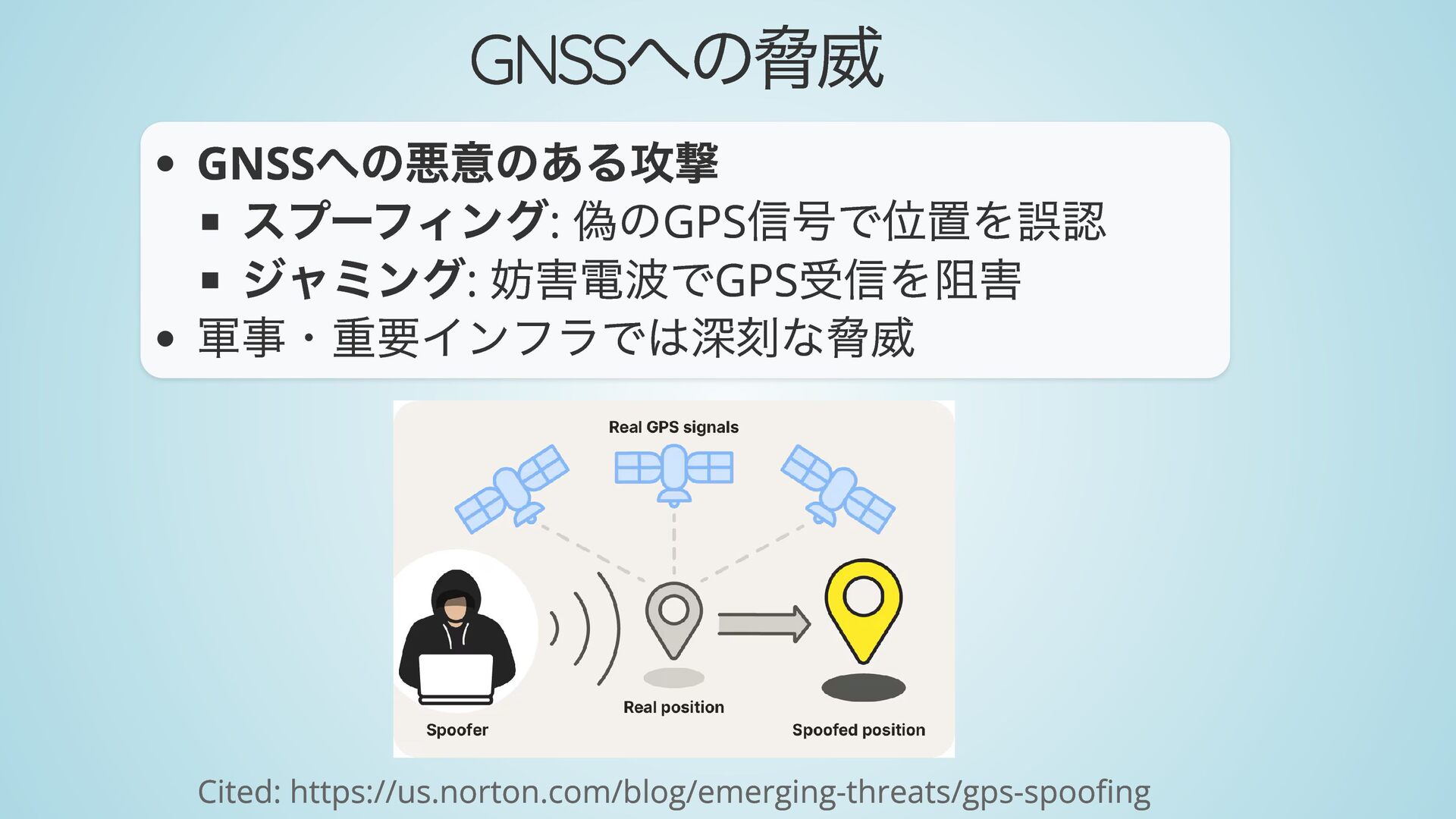
・ GNSSの限界と脅威(水中・地下での使用不可、スプーフィング/ジャミング)
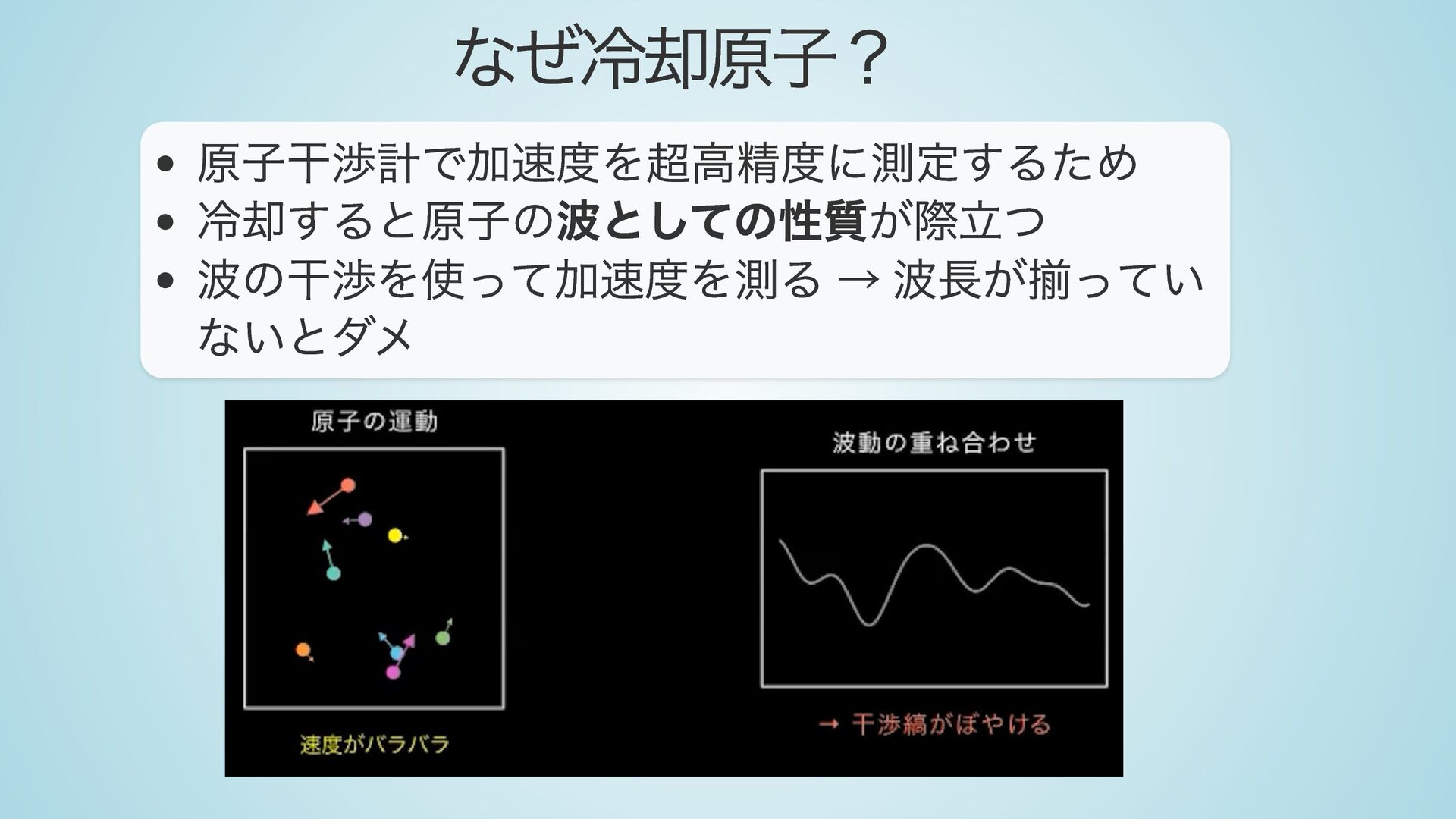
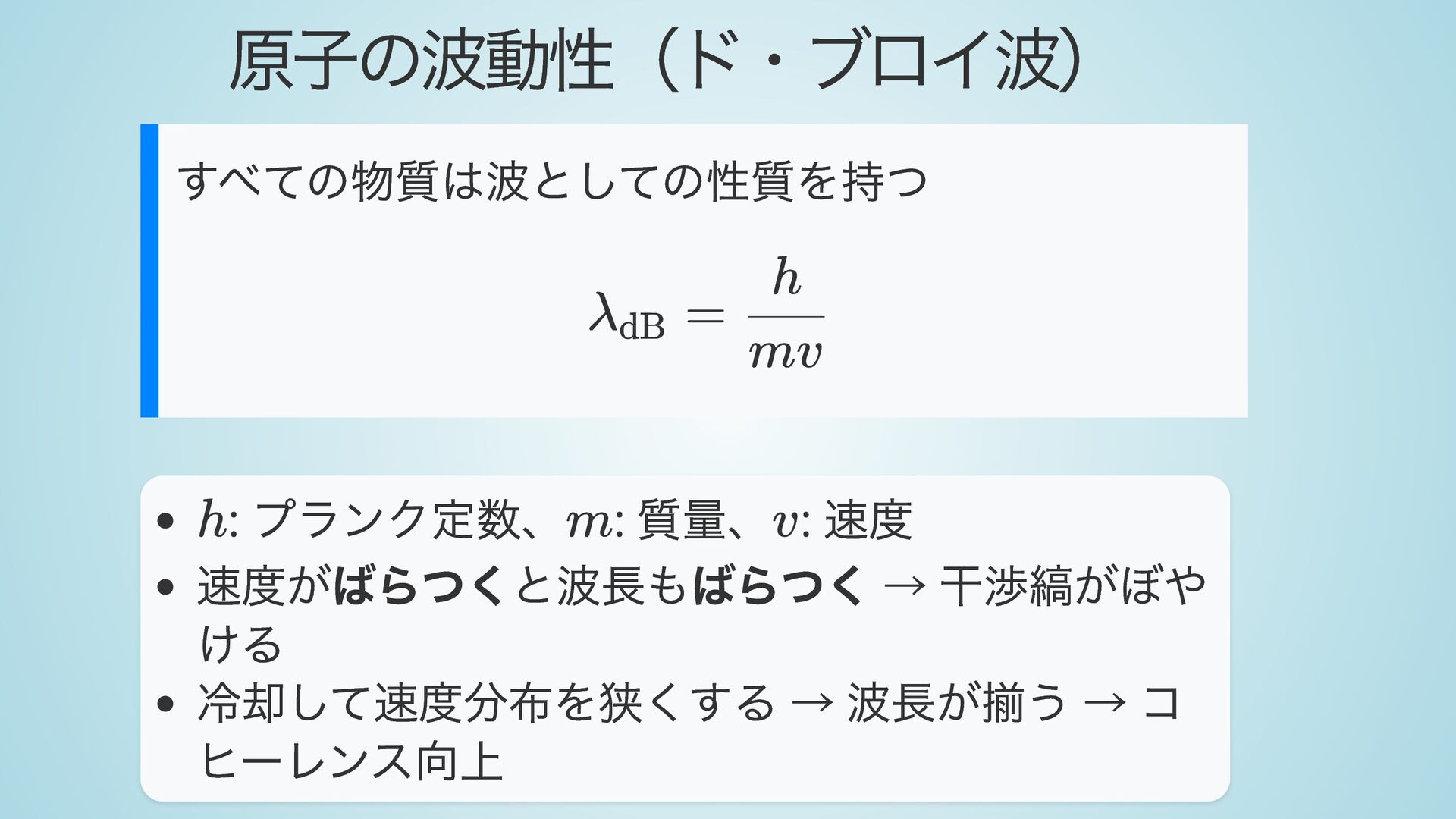
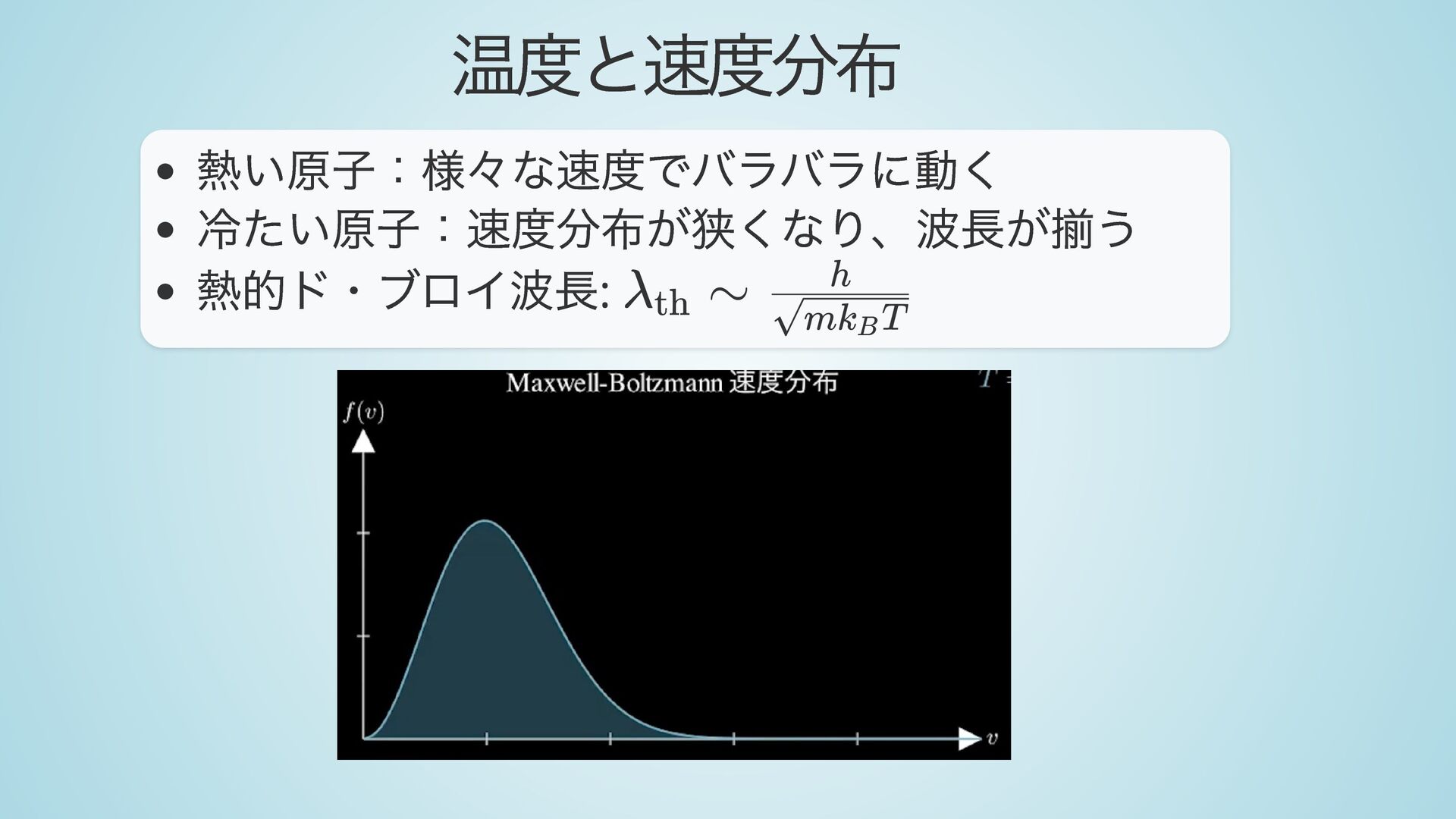
・ 冷却原子の波動性(ド・ブロイ波長、レーザー冷却、コヒーレンス)
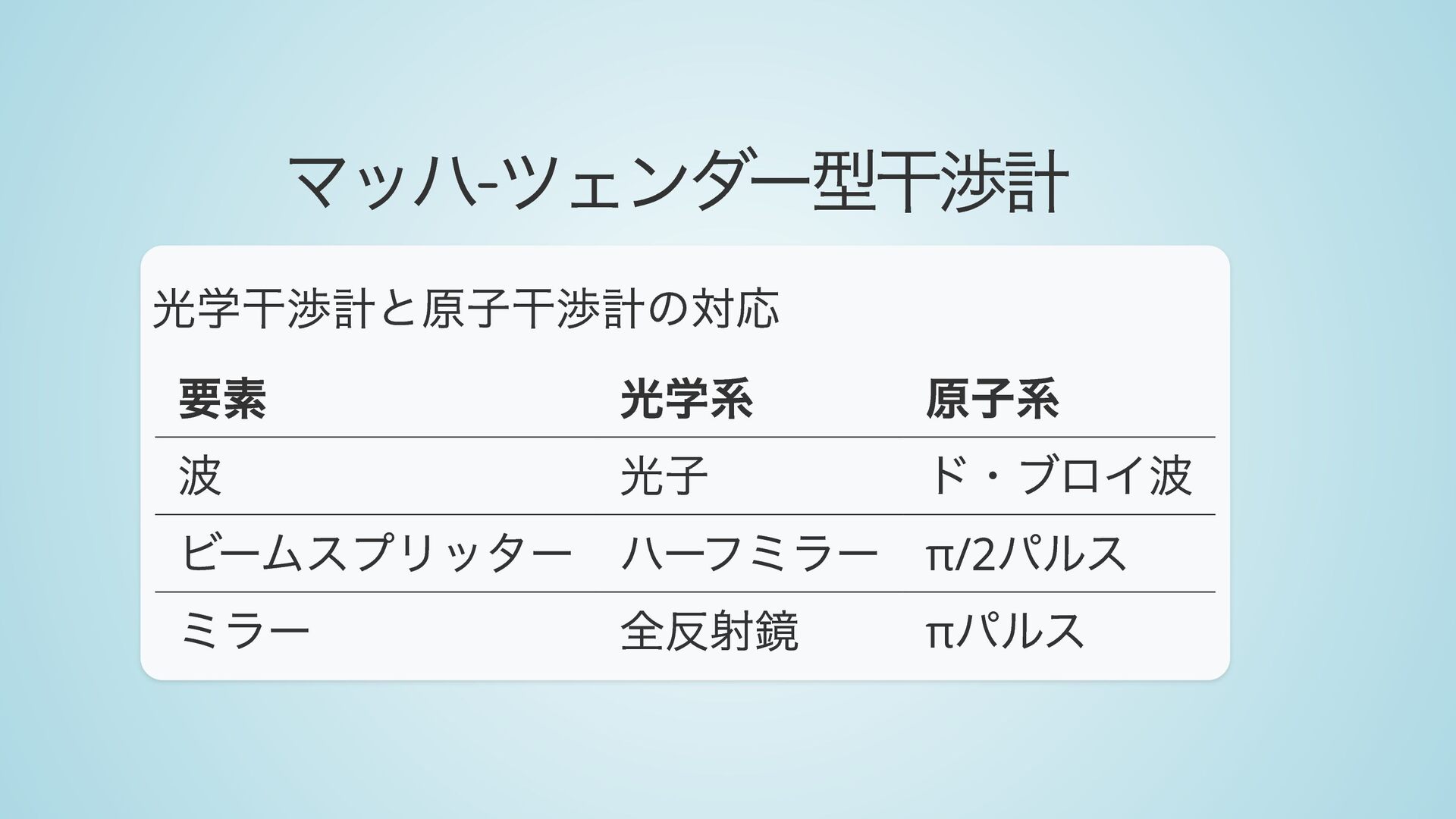
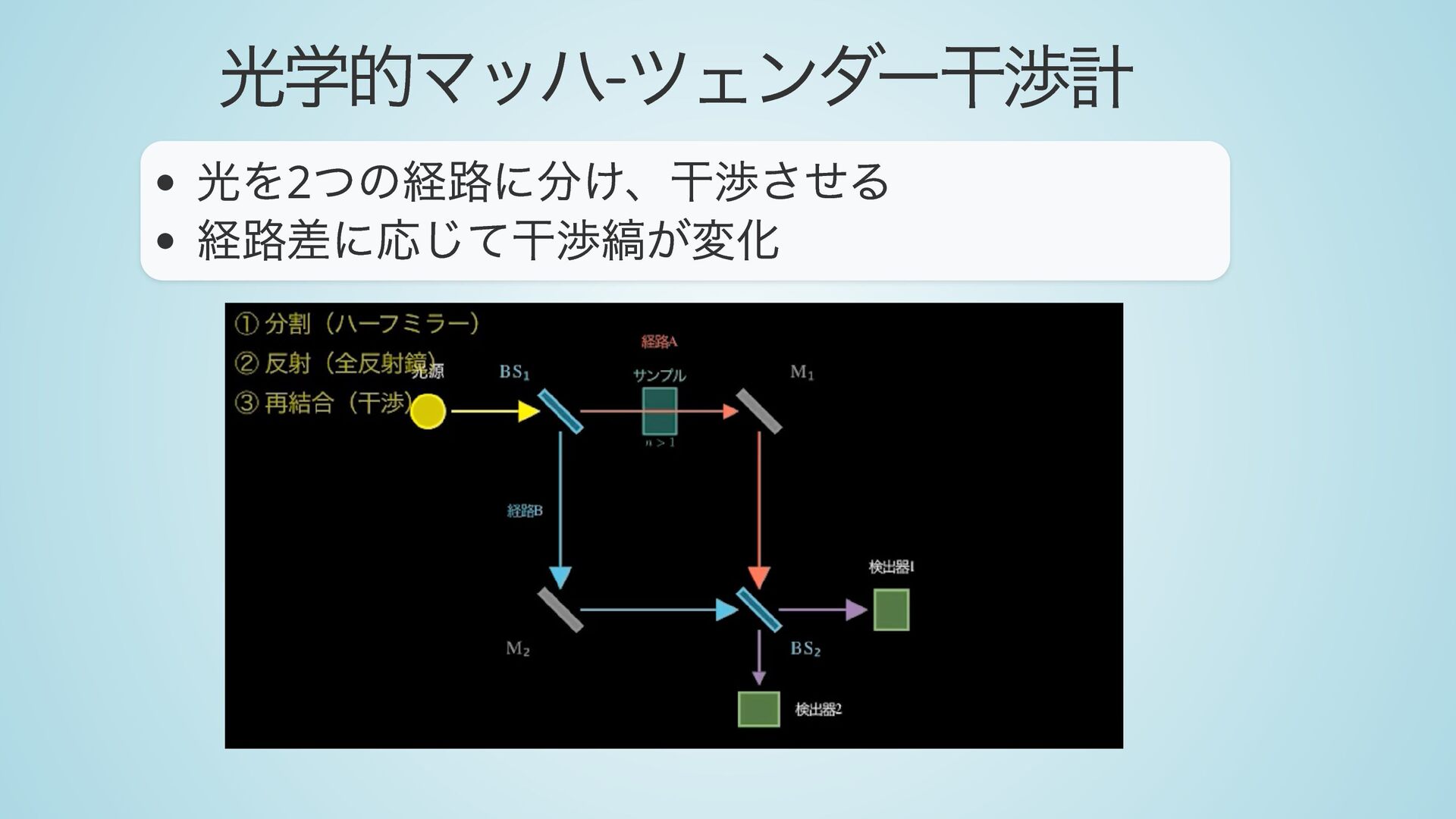
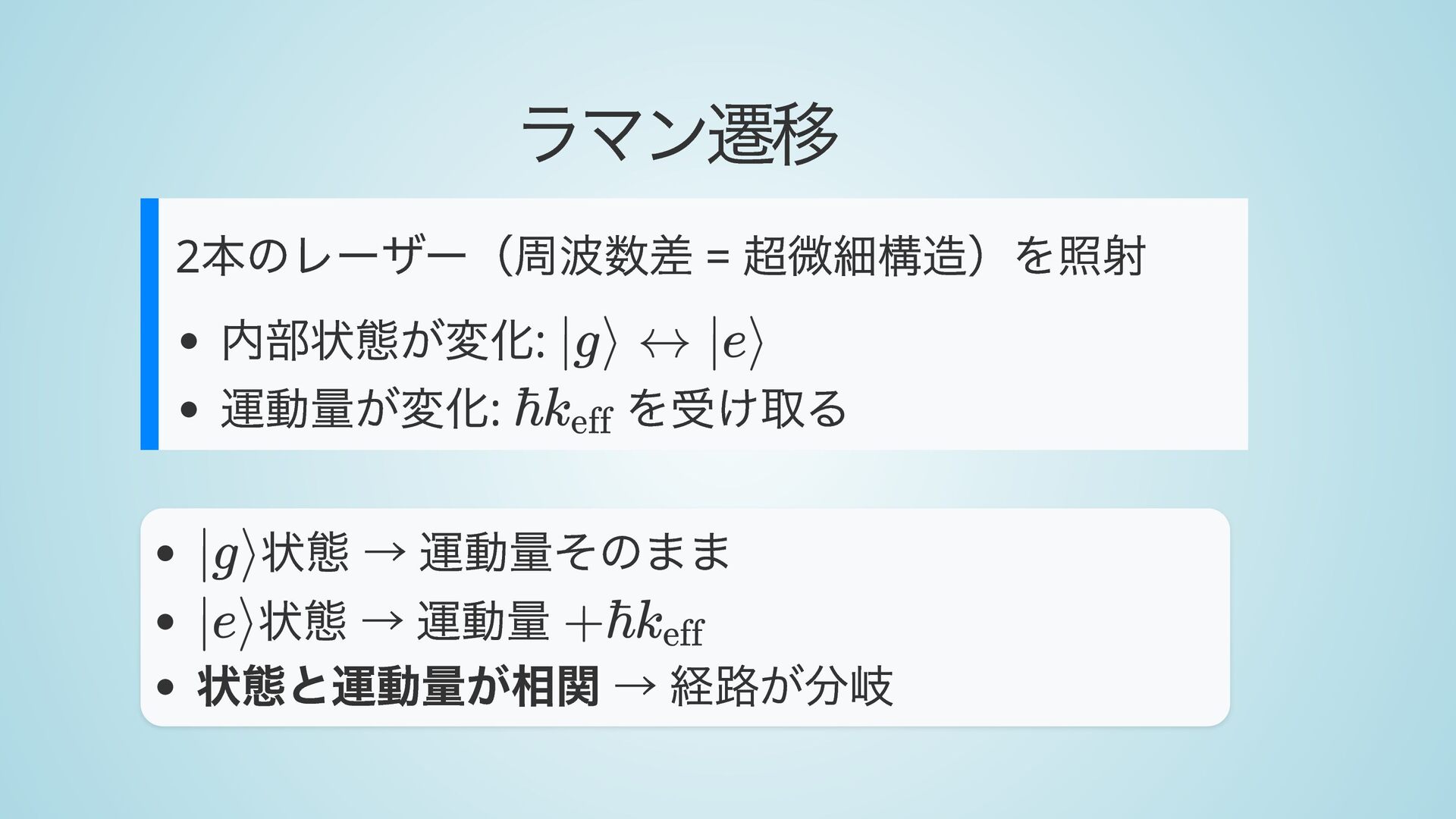
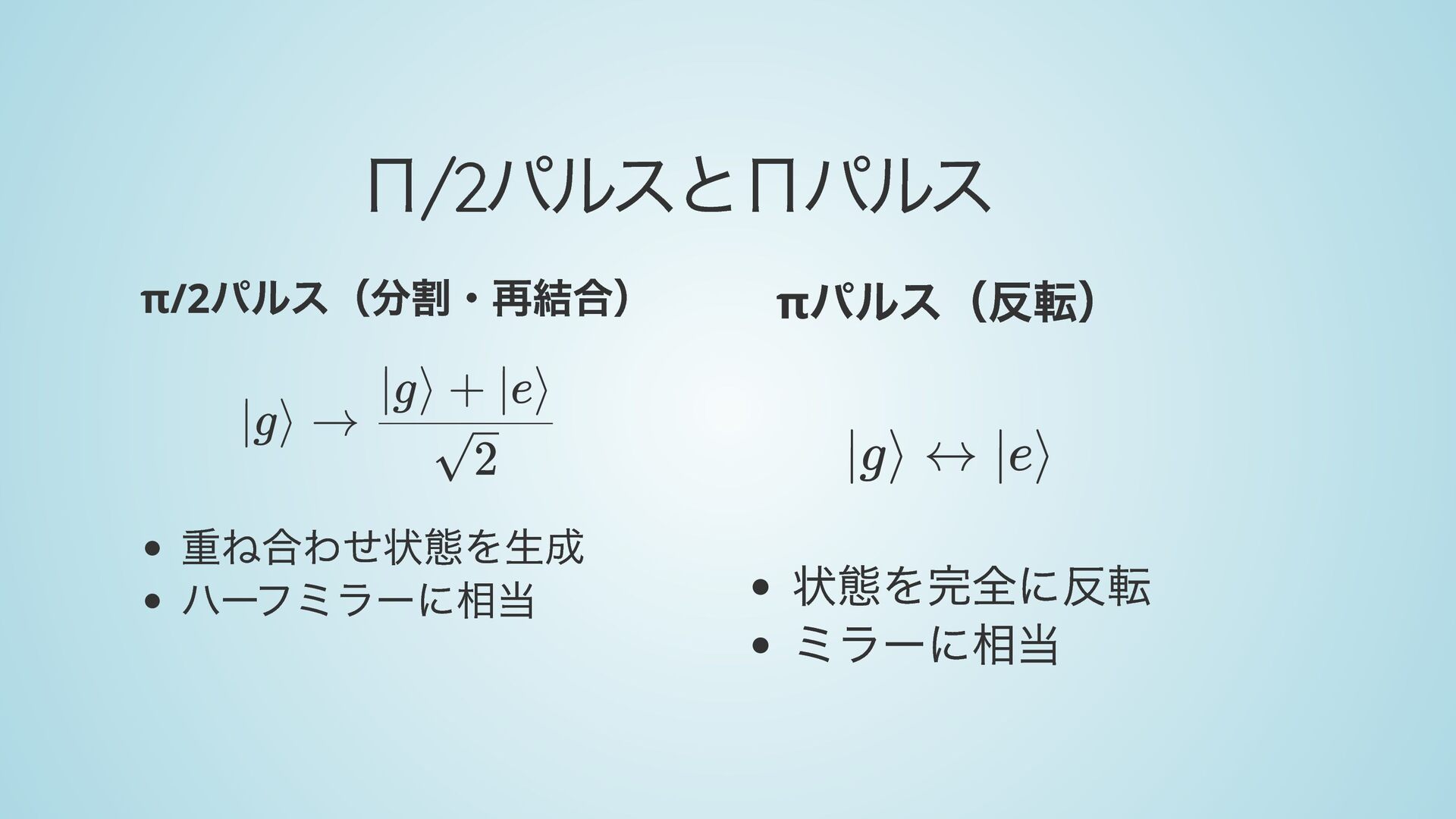
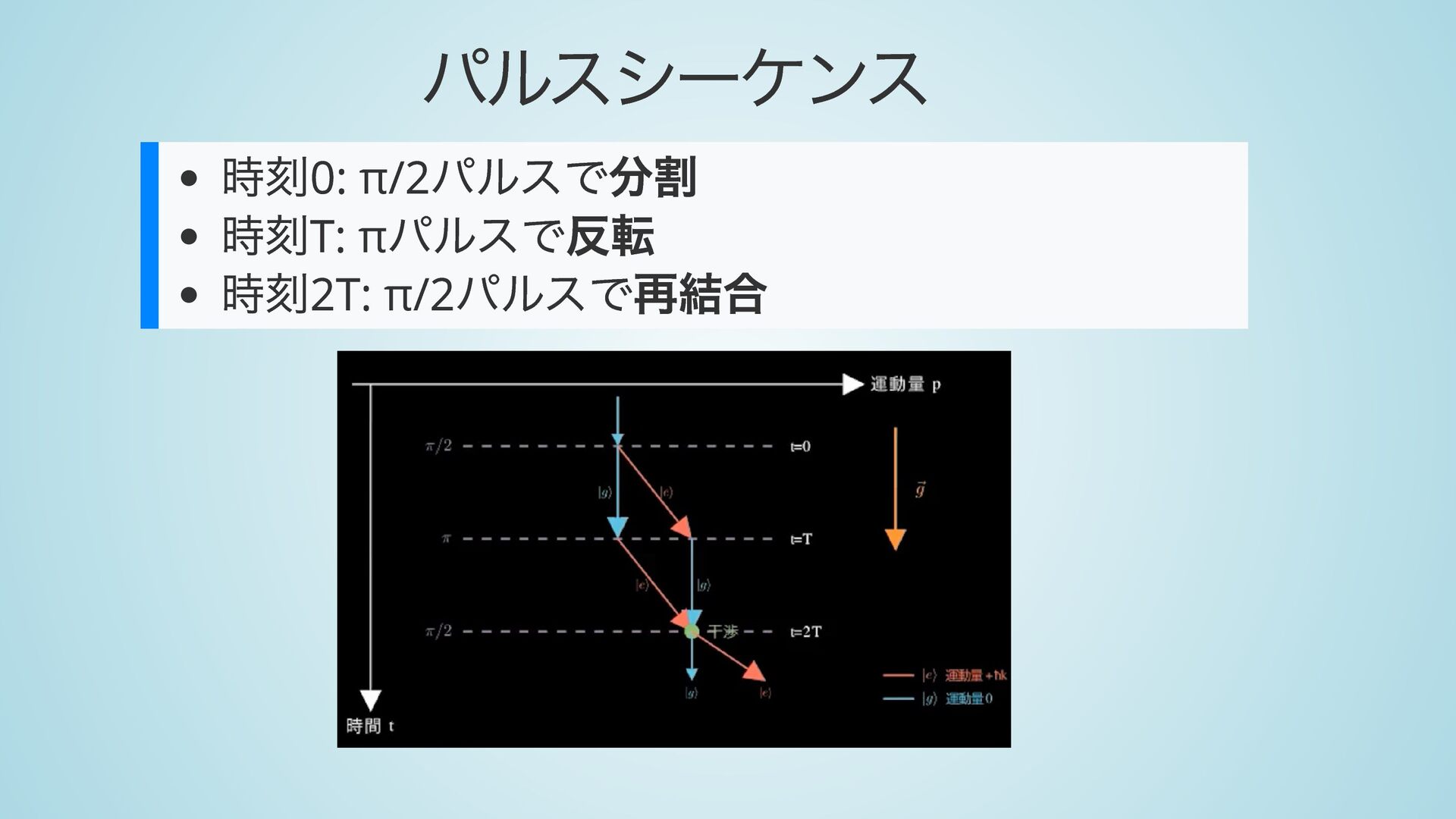
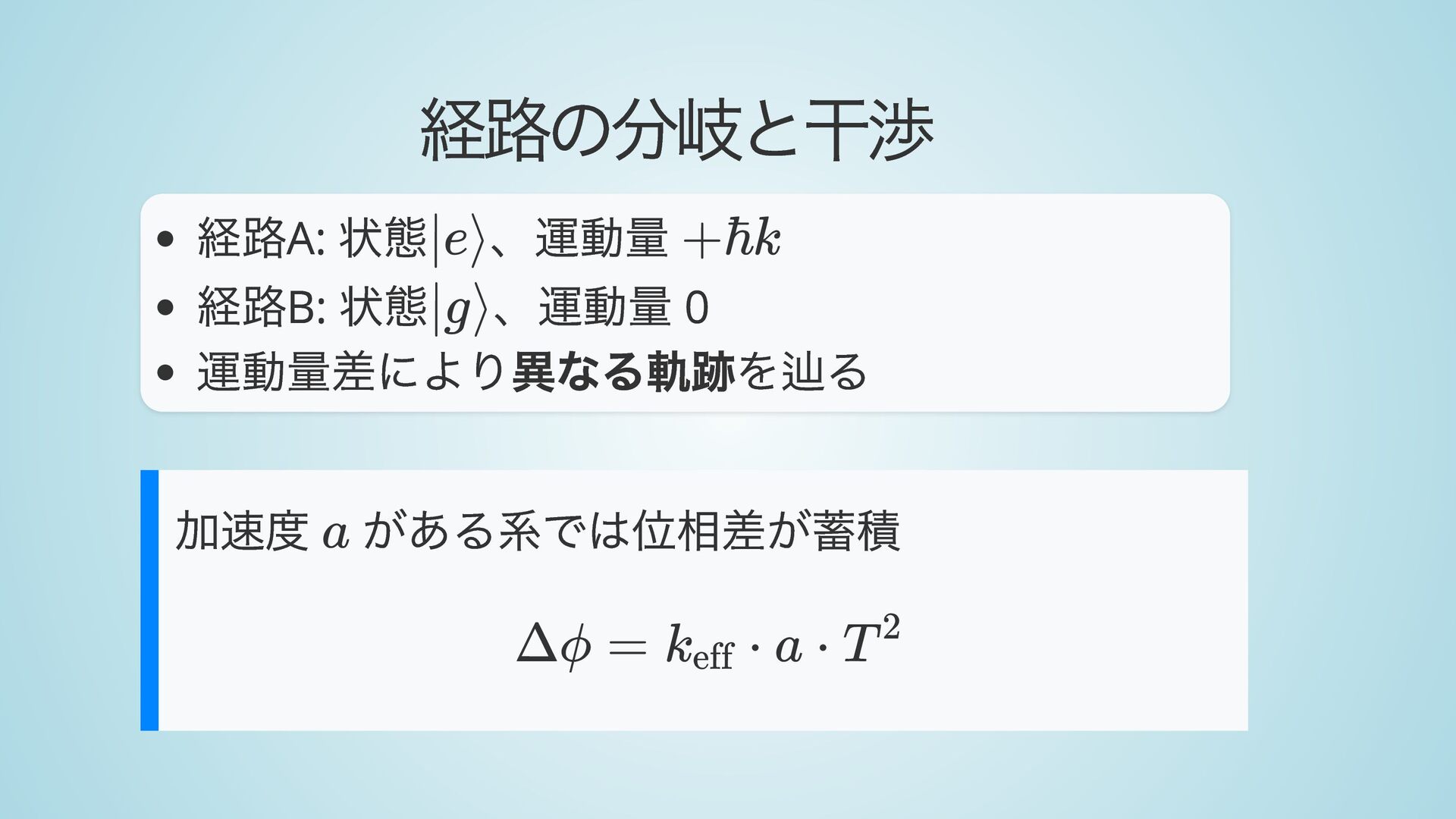
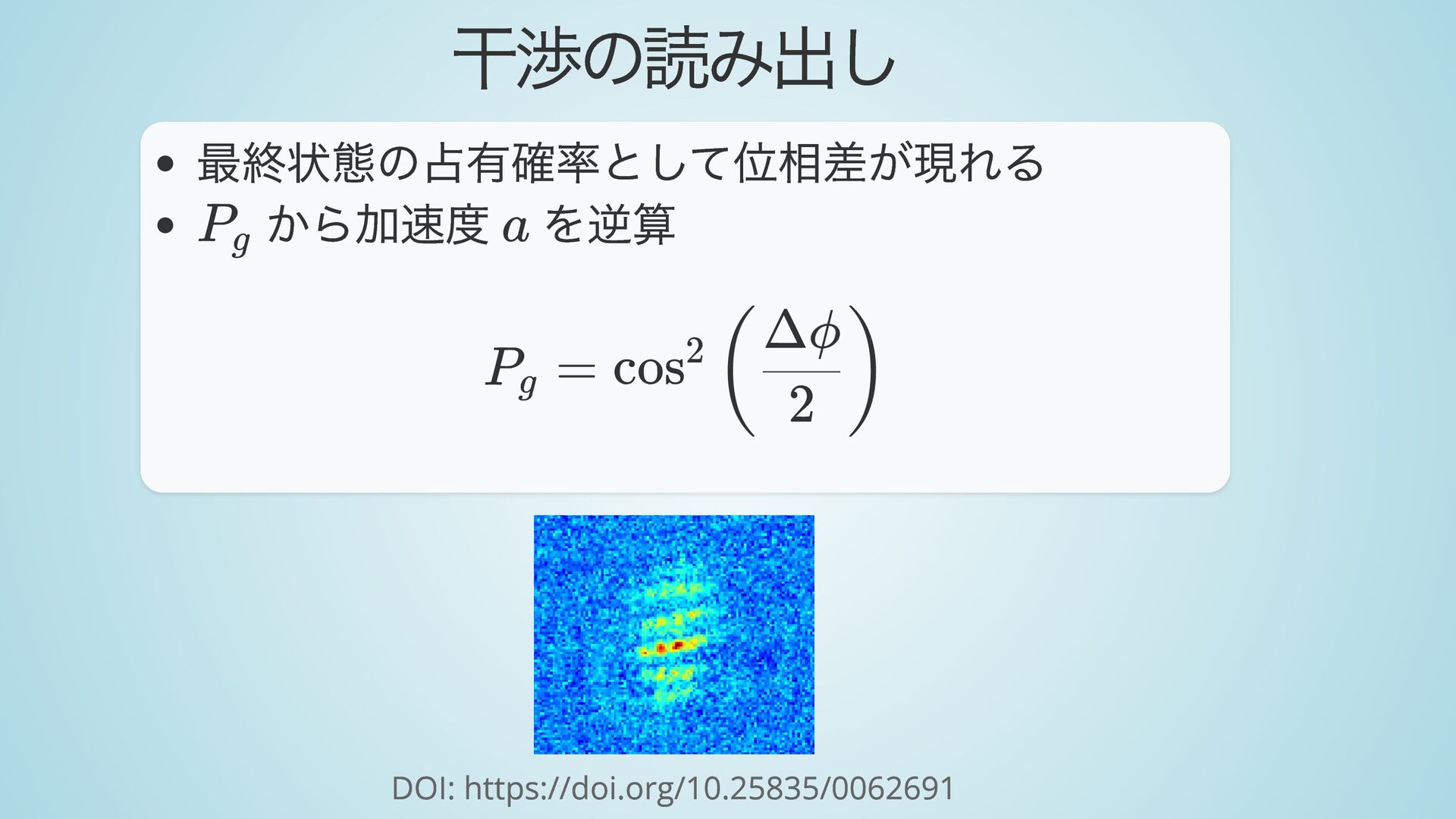
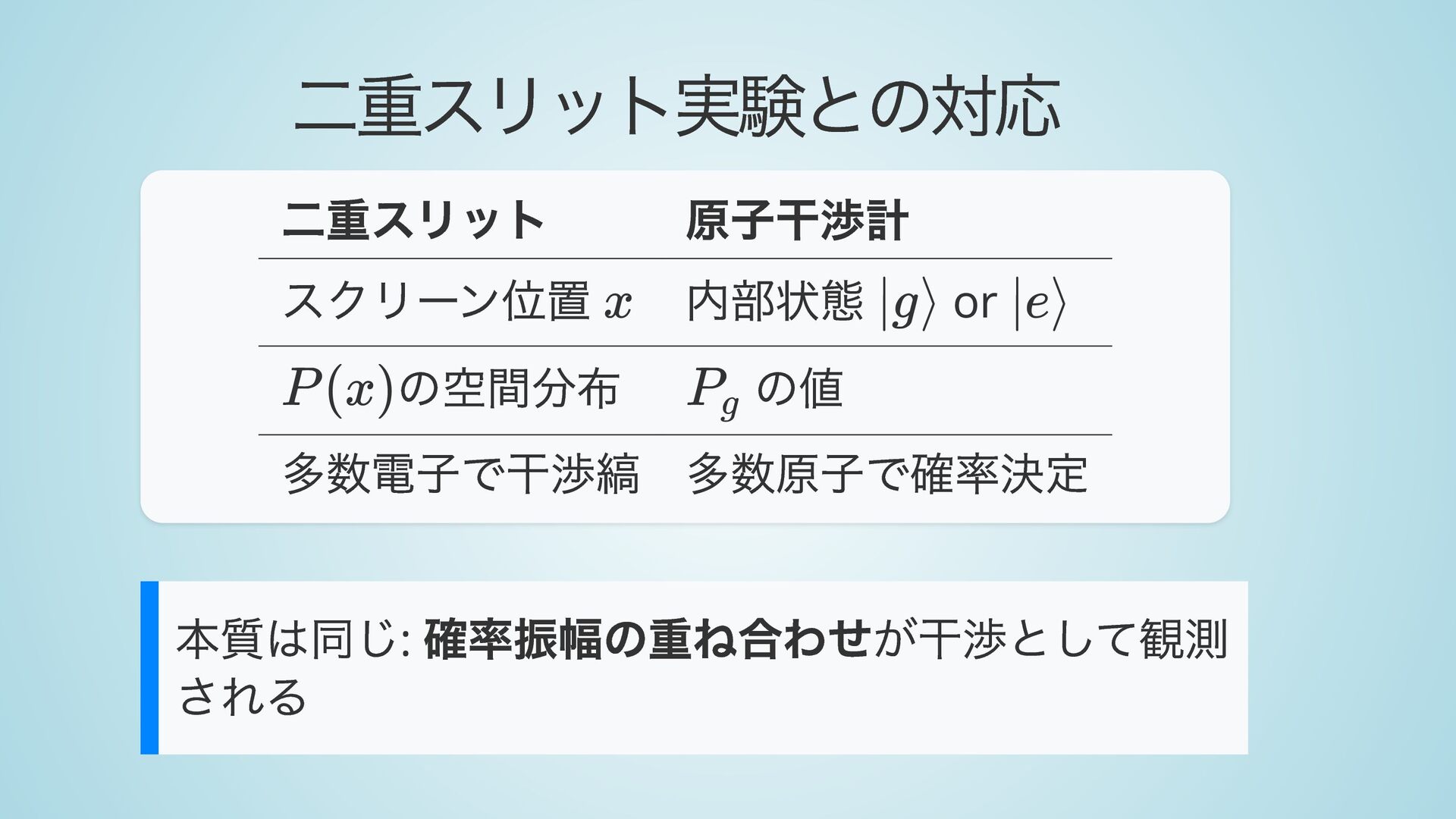
・ 原子干渉計の原理(ラマン遷移、マッハ-ツェンダー型干渉計)
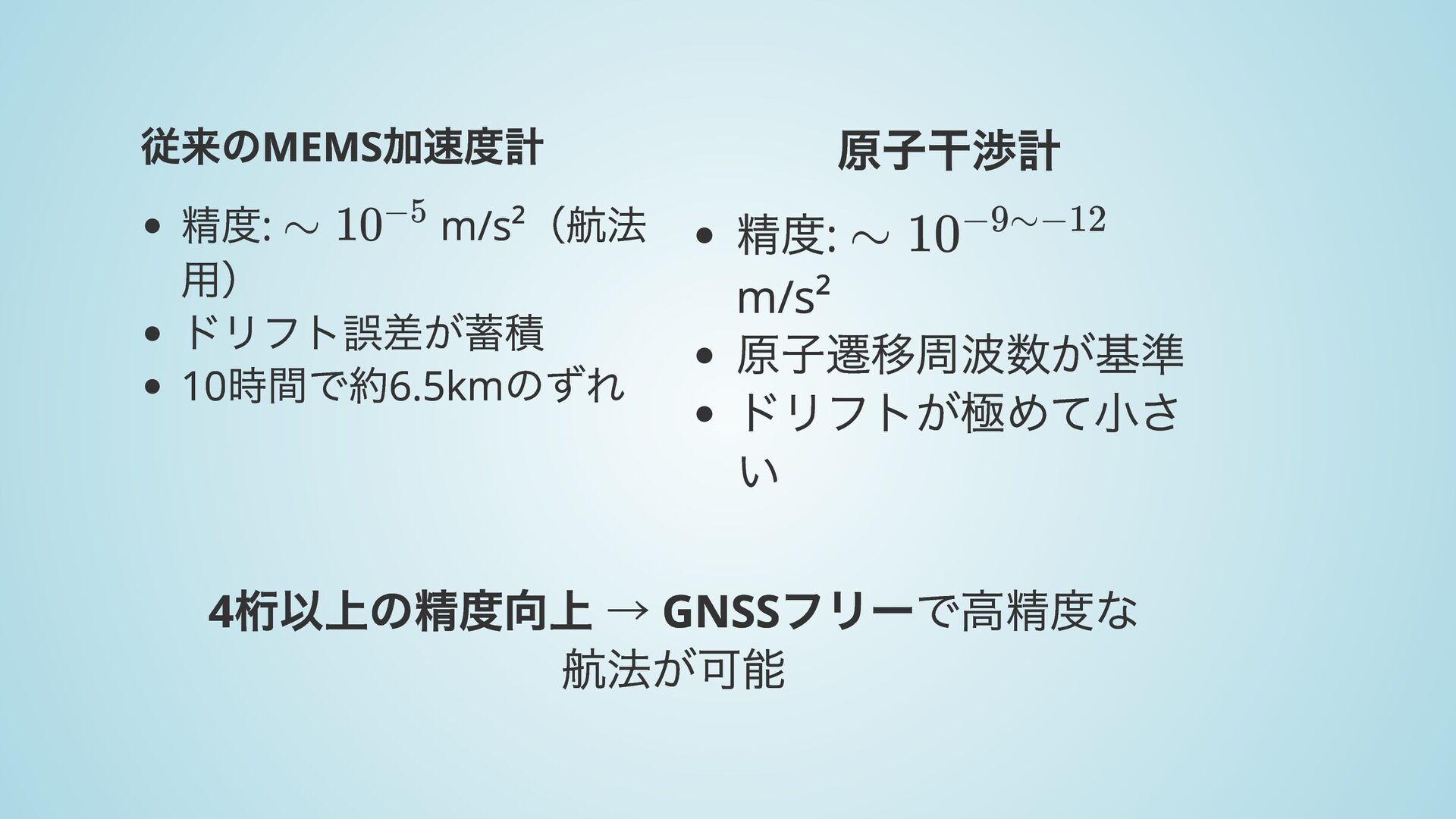
・ 量子センサーの優位性(MEMS比4桁以上の精度向上)
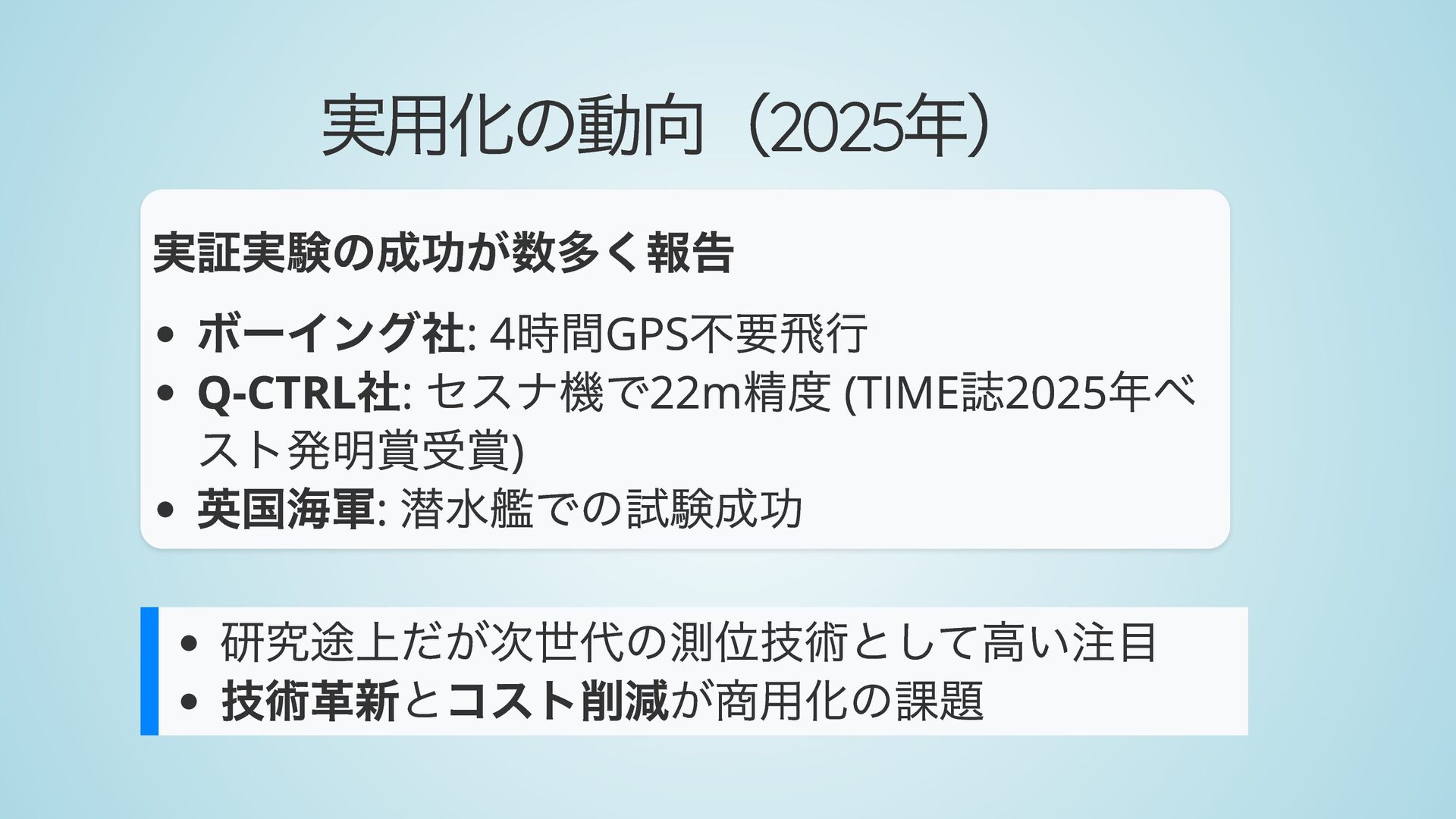
・ 実用化の動向(2025年時点でのボーイング、Q-CTRL、英国海軍の実証実験)
※ 加速度測定に焦点を当てた内容です。ジャイロ(回転測定)は割愛しています。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}