Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
データマイニング - グラフデータと経路
Search
Y. Yamamoto
PRO
June 13, 2025
Science
770
2
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
データマイニング - グラフデータと経路
1. グラフとは
2. 経路
Y. Yamamoto
PRO
June 13, 2025
More Decks by Y. Yamamoto
See All by Y. Yamamoto
データベース15: ビッグデータ時代のデータベース
trycycle
PRO
1
500
データベース14: B+木 & ハッシュ索引
trycycle
PRO
0
780
データベース12: 正規化(2/2) - データ従属性に基づく正規化
trycycle
PRO
0
1.5k
データベース11: 正規化(1/2) - 望ましくない関係スキーマ
trycycle
PRO
0
1.5k
データベース10: 拡張実体関連モデル
trycycle
PRO
0
1.4k
データベース09: 実体関連モデル上の一貫性制約
trycycle
PRO
0
1.7k
機械学習 - ニューラルネットワーク入門
trycycle
PRO
0
1.1k
データベース08: 実体関連モデルとは?
trycycle
PRO
0
1.5k
機械学習 - SVM
trycycle
PRO
2
1.2k
Other Decks in Science
See All in Science
20260220 OpenIDファウンデーション・ジャパン ご紹介 / 20260220 OpenID Foundation Japan Intro
oidfj
0
380
チュートリアル:世界モデル
hf149
0
2k
次代のデータサイエンティストへ~スキルチェックリスト、タスクリスト更新~
datascientistsociety
PRO
3
47k
先端因果推論特別研究チームの研究構想と 人間とAIが協働する自律因果探索の展望
sshimizu2006
3
970
東北地方における過去20年間の降水量の変化
naokimuroki
1
380
Conwayの法則を"ちゃんと"使うために — 原典でConwayは何を言っていたのか
bonotake
10
6k
J-STAGE全文XML登載必須化について
xspa2012
0
1.2k
2026 Introduction to University Math 01
kanaya
0
110
Physical AIを支えるWeights & Biases
olachinkei
1
430
あなたに水耕栽培を愛していないとは言わせない
mutsumix
1
370
Van Dare naar Durf
voginip
0
270
人生を変えた一冊「独学大全」のはなし / Self-study ENCYCLOPEDIA: The Book Which Change My Life #独学大全 #EM推し本
expajp
0
190
Featured
See All Featured
The Success of Rails: Ensuring Growth for the Next 100 Years
eileencodes
47
8.2k
Heart Work Chapter 1 - Part 1
lfama
PRO
8
36k
The browser strikes back
jonoalderson
0
1.4k
SEO for Brand Visibility & Recognition
aleyda
0
4.6k
Measuring Dark Social's Impact On Conversion and Attribution
stephenakadiri
2
240
We Have a Design System, Now What?
morganepeng
55
8.2k
A Guide to Academic Writing Using Generative AI - A Workshop
ks91
PRO
1
360
Avoiding the “Bad Training, Faster” Trap in the Age of AI
tmiket
0
200
Utilizing Notion as your number one productivity tool
mfonobong
4
480
The B2B funnel & how to create a winning content strategy
katarinadahlin
PRO
1
440
DevOps and Value Stream Thinking: Enabling flow, efficiency and business value
helenjbeal
1
270
Site-Speed That Sticks
csswizardry
13
1.4k
Transcript
グラフデータ ⼭本 祐輔 名古屋市⽴⼤学 データサイエンス研究科
[email protected]
第9回 データマイニング (グラフ分析入門) ⼭本祐輔
クリエイティブコモンズライセンス (CC BY-NC-SA 4.0)
講義資料 https://b.hontolab.org/graph-analysis
クエスチョン Q. 「グラフ」と聞いて 思い浮かべるものは?
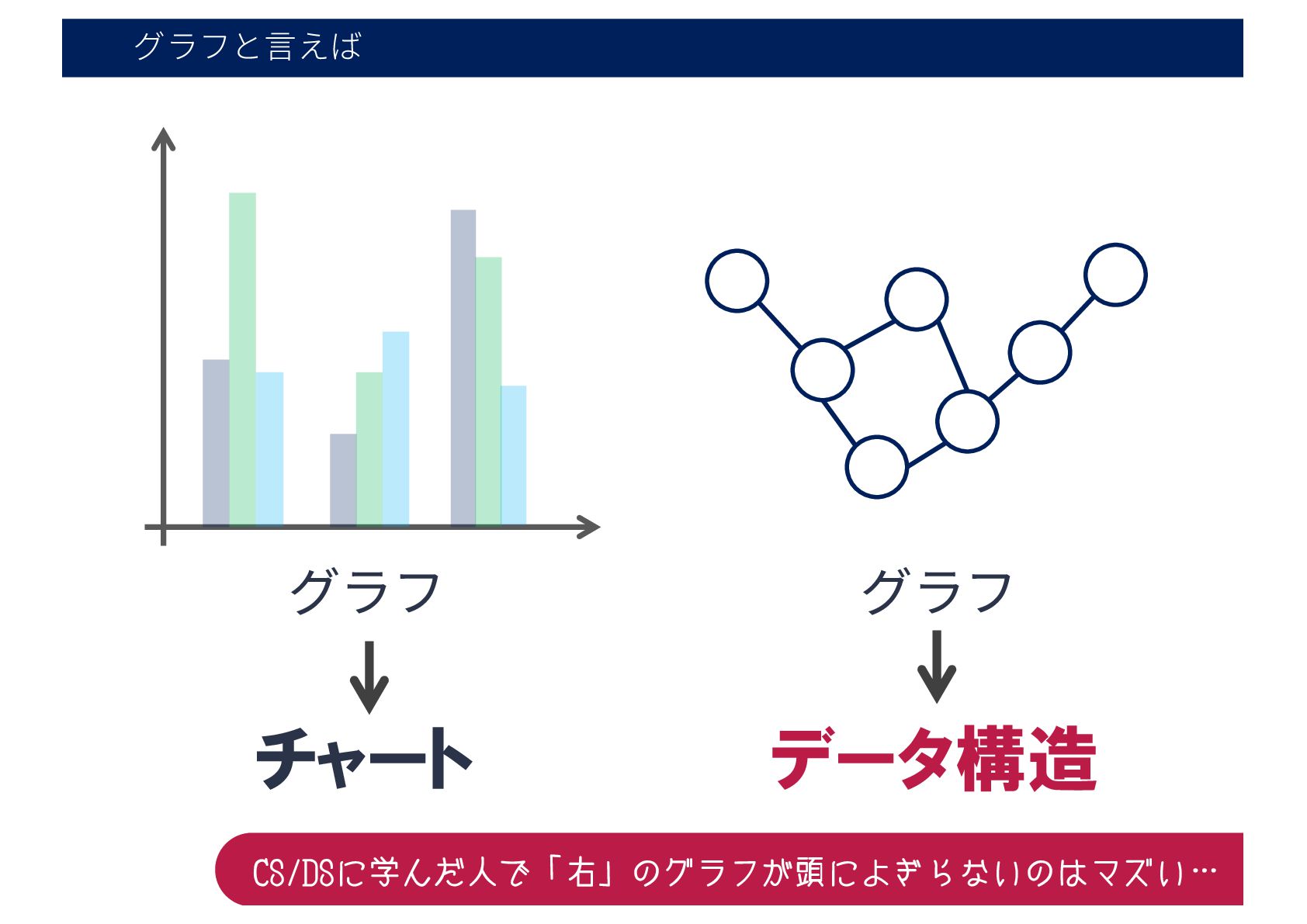
グラフと⾔えば グラフ グラフ チャート データ構造 CS/DSに学んだ人で「右」のグラフが頭によぎらないのはマズい…
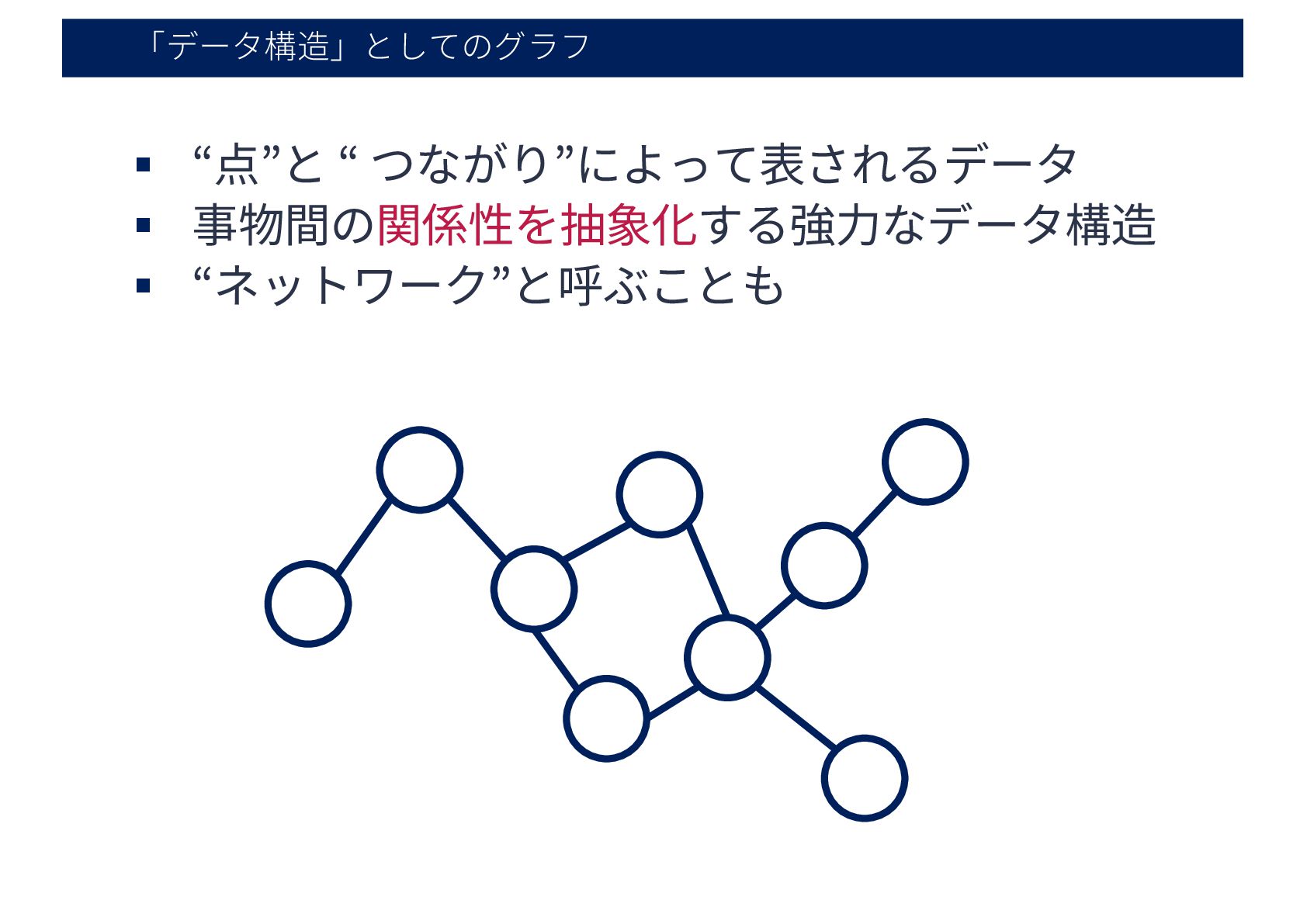
「データ構造」としてのグラフ § “点”と “ つながり”によって表されるデータ § 事物間の関係性を抽象化する強⼒なデータ構造 § “ネットワーク”と呼ぶことも
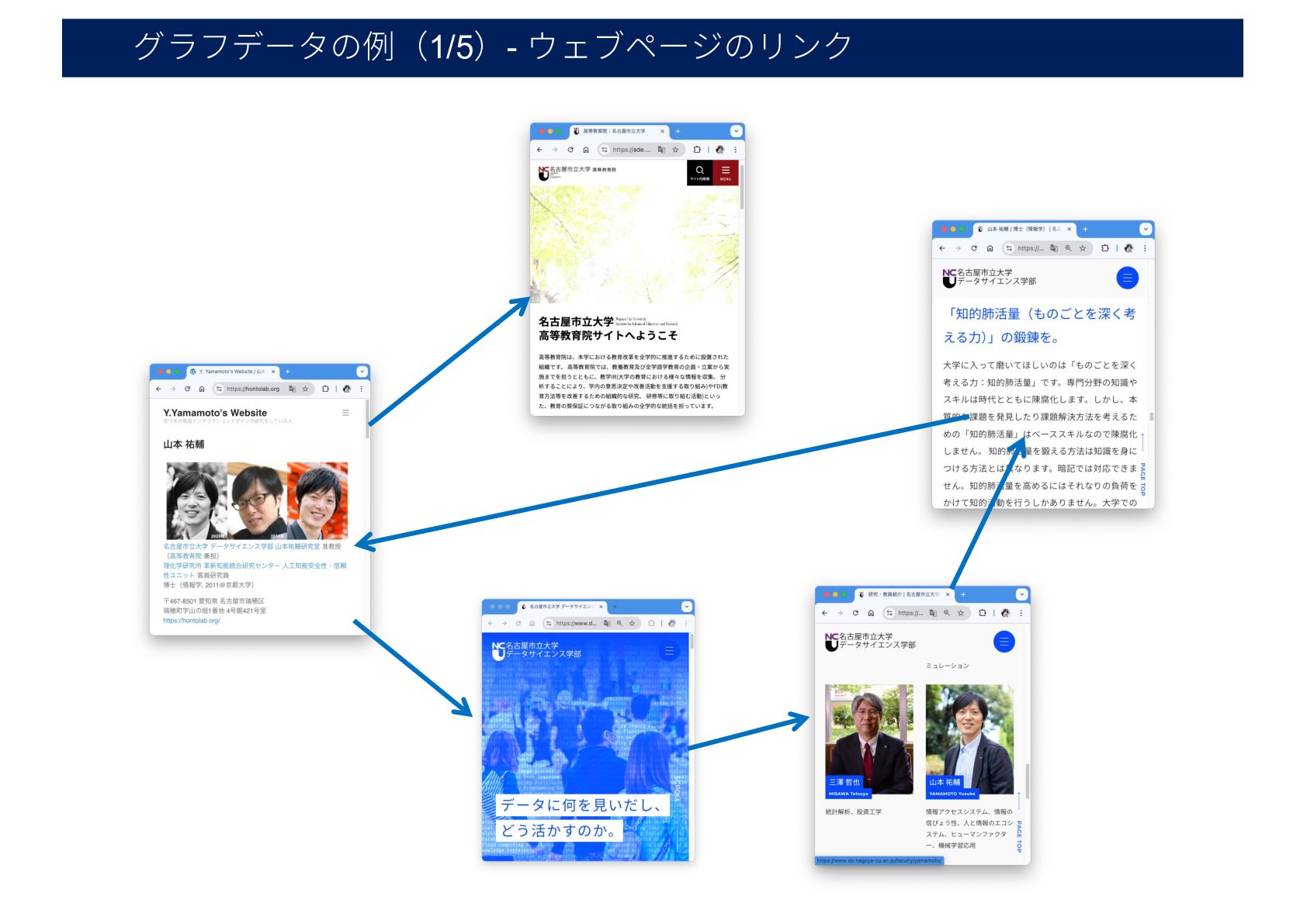
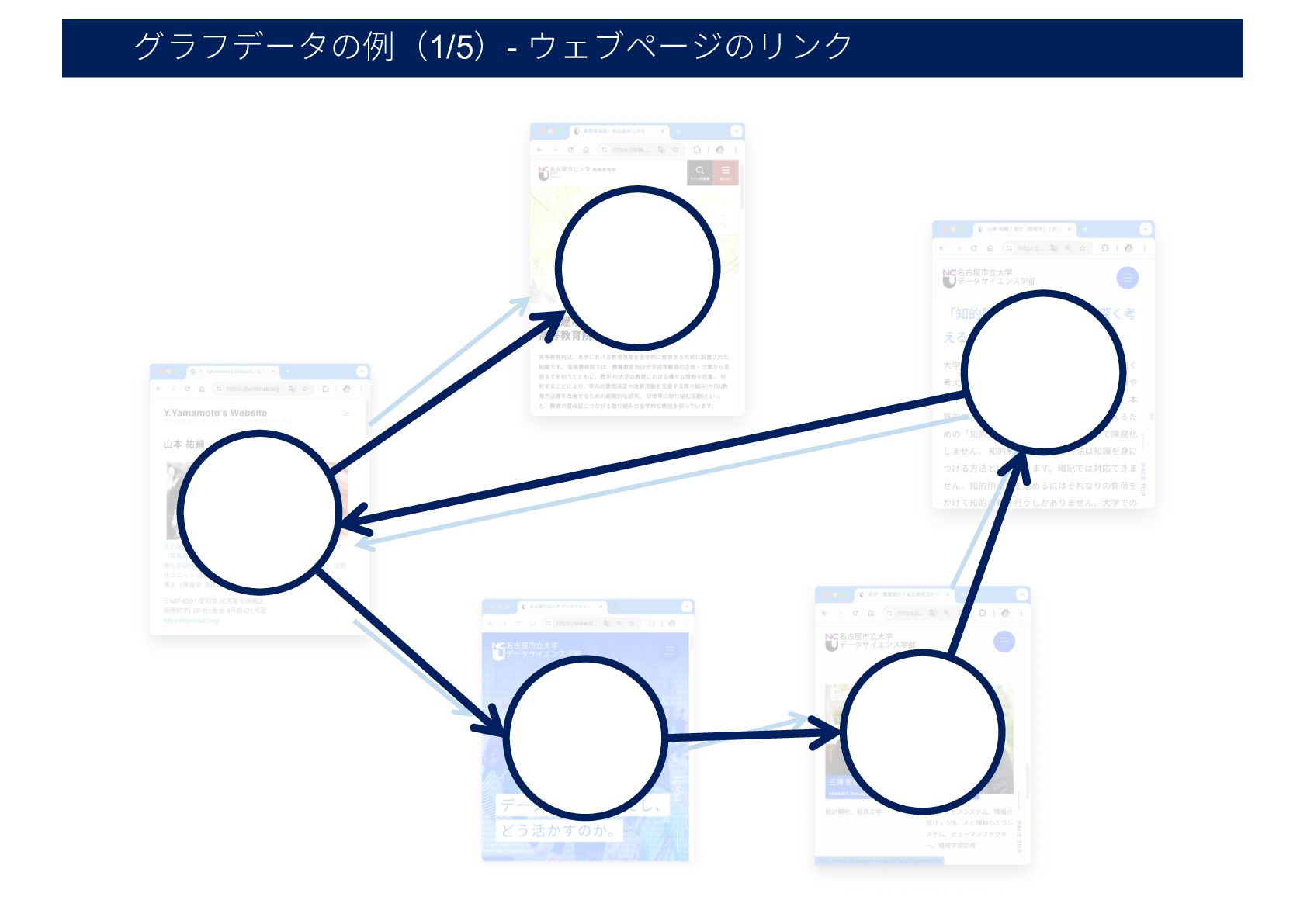
グラフデータの例(1/5)- ウェブページのリンク
グラフデータの例(1/5)- ウェブページのリンク
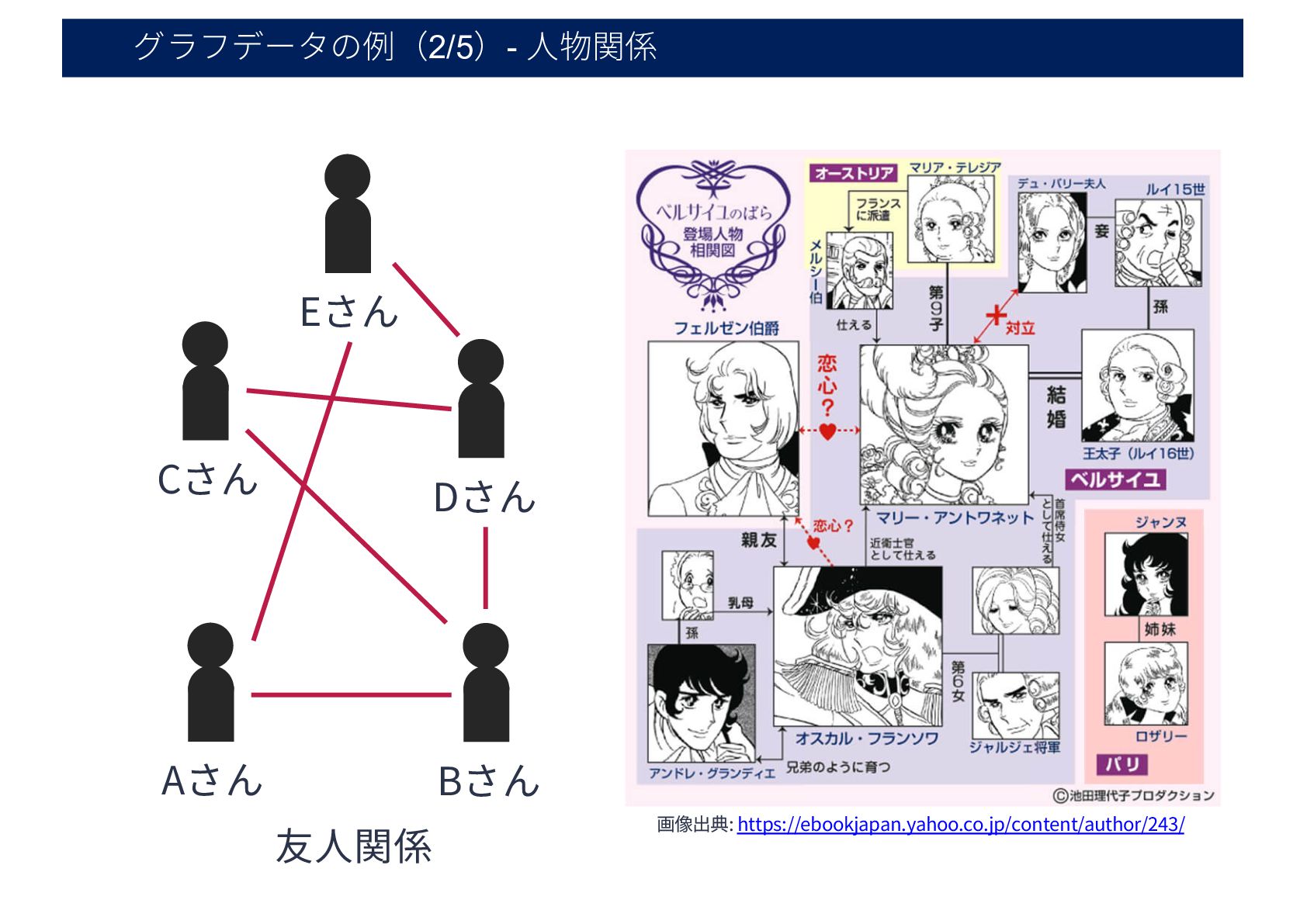
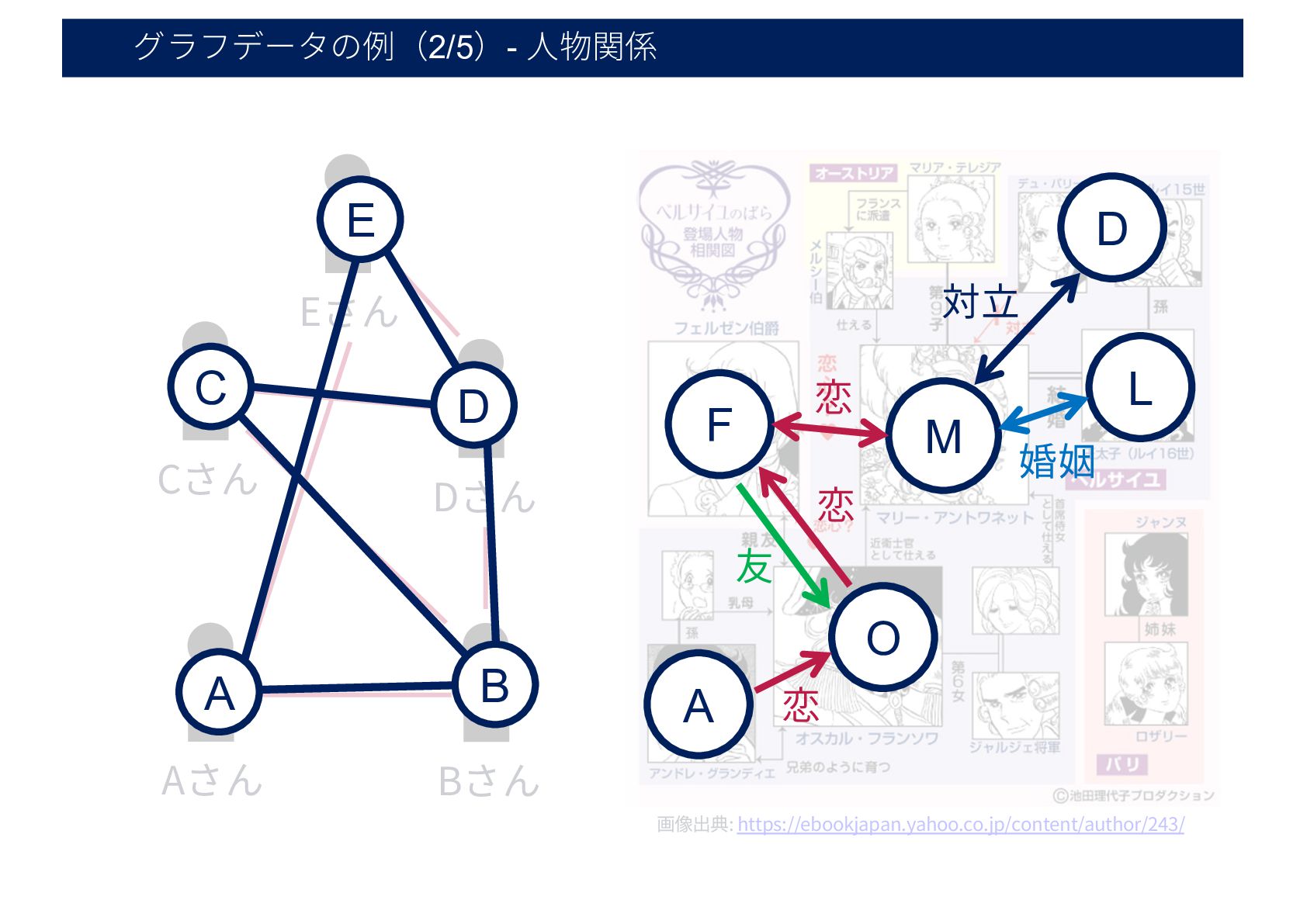
グラフデータの例(2/5)- ⼈物関係 画像出典: https://ebookjapan.yahoo.co.jp/content/author/243/ Aさん Bさん Cさん Dさん Eさん 友⼈関係
グラフデータの例(2/5)- ⼈物関係 画像出典: https://ebookjapan.yahoo.co.jp/content/author/243/ Aさん Bさん Cさん Dさん Eさん M
F O A L D 対⽴ 恋 恋 恋 友 婚姻 C A B E D
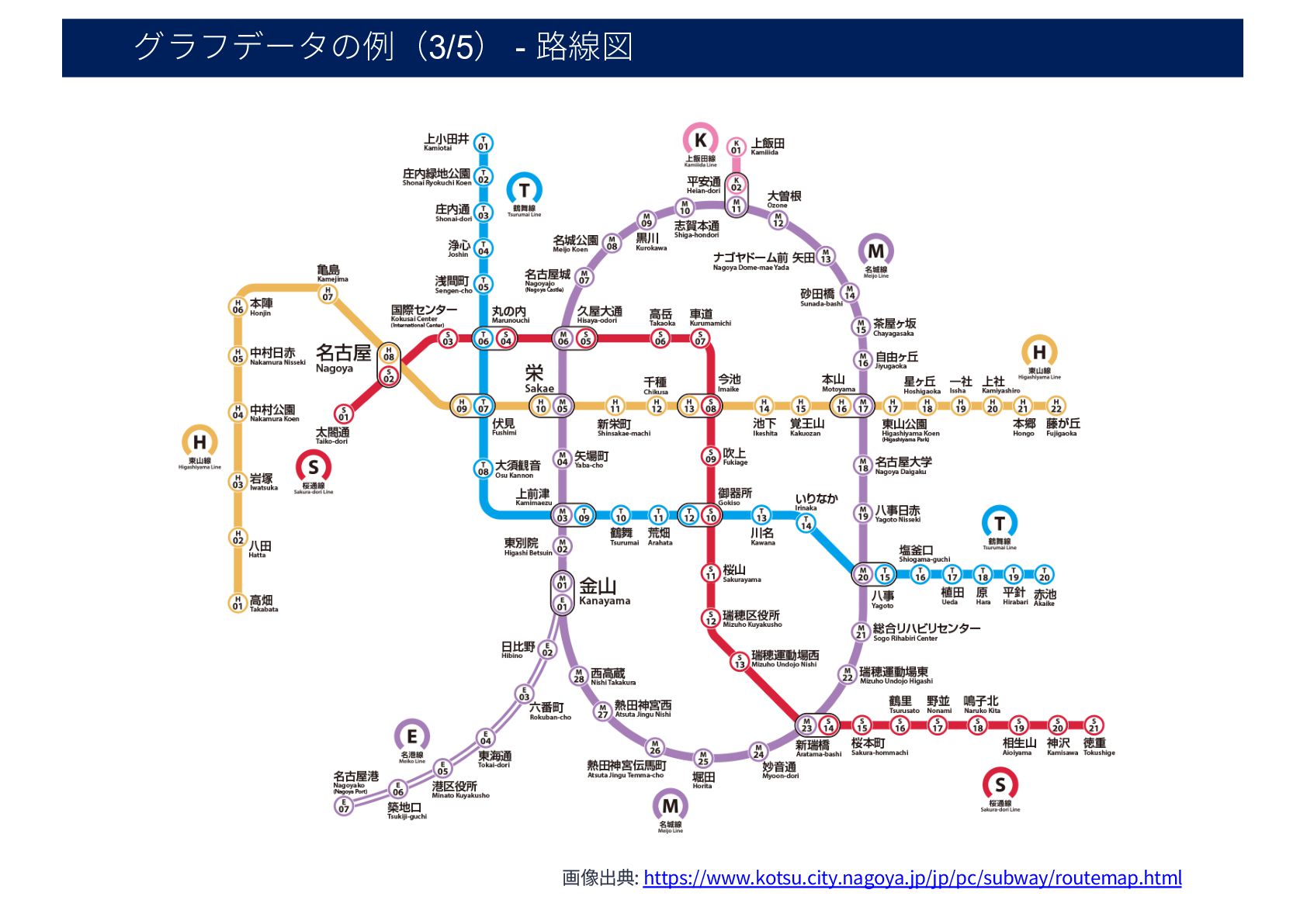
グラフデータの例(3/5) - 路線図 画像出典: https://www.kotsu.city.nagoya.jp/jp/pc/subway/routemap.html
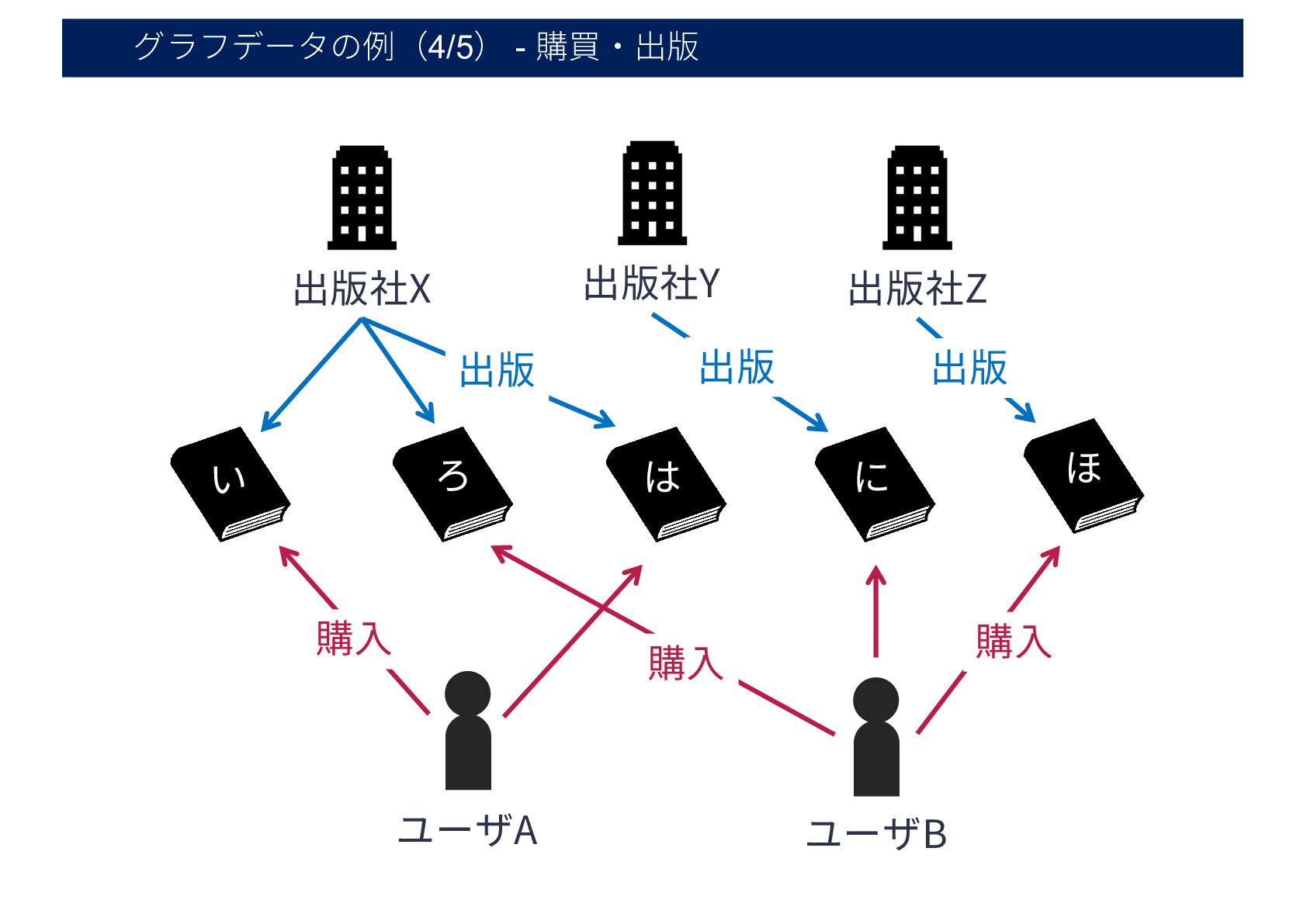
グラフデータの例(4/5) - 購買・出版 ユーザA ユーザB い ろ は に ほ
出版社X 出版社Y 出版社Z 出版 出版 出版 購⼊ 購⼊ 購⼊
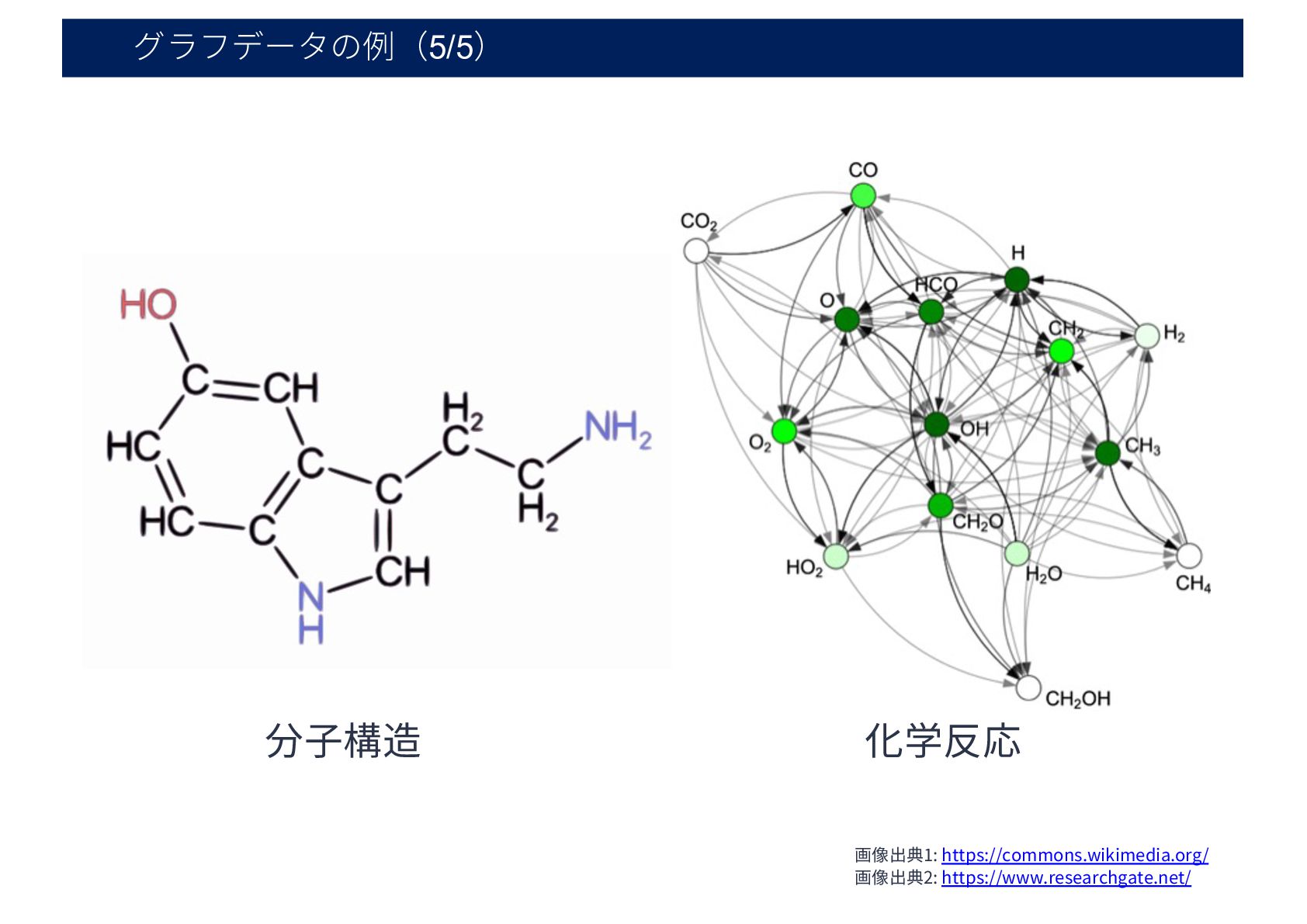
グラフデータの例(5/5) 画像出典2: https://www.researchgate.net/ 画像出典1: https://commons.wikimedia.org/ 分⼦構造 化学反応
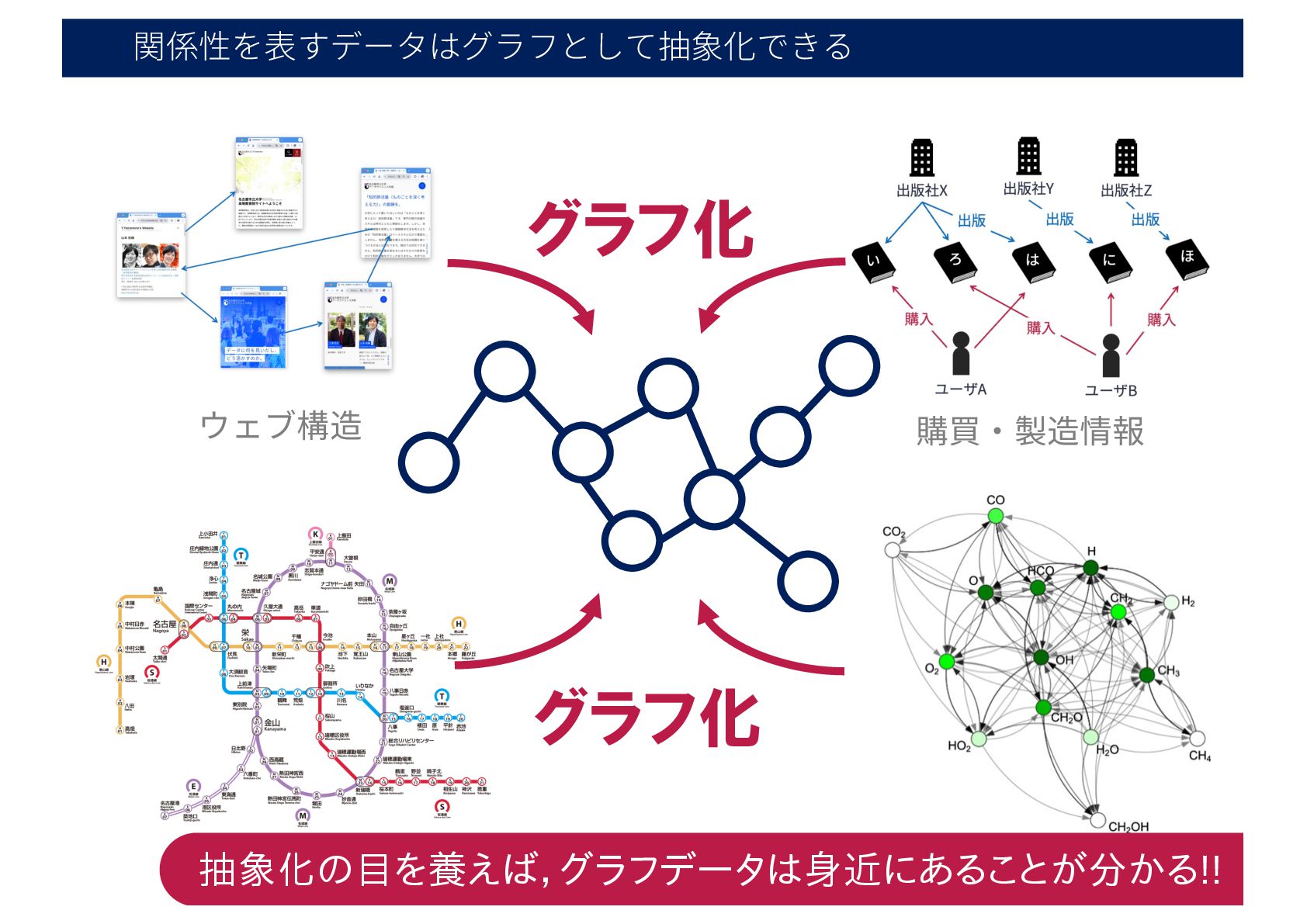
関係性を表すデータはグラフとして抽象化できる ウェブ構造 分⼦構造・化学反応 経路情報 購買・製造情報 グラフ化 グラフ化 抽象化の目を養えば,グラフデータは身近にあることが分かる!!
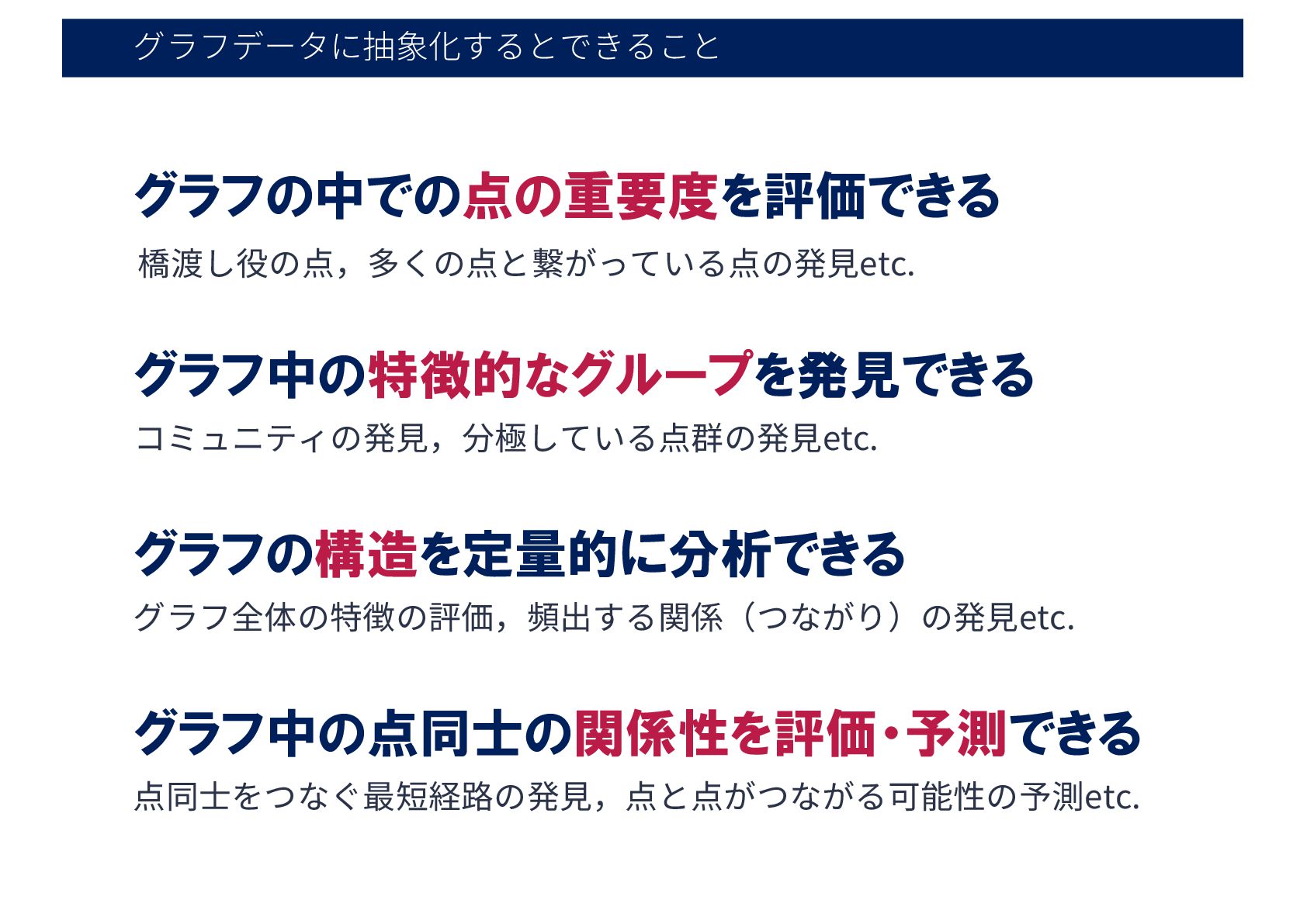
グラフデータに抽象化するとできること グラフの中での点の重要度を評価できる グラフ中の特徴的なグループを発見できる グラフ中の点同士の関係性を評価・予測できる グラフの構造を定量的に分析できる 橋渡し役の点,多くの点と繋がっている点の発⾒etc. コミュニティの発⾒,分極している点群の発⾒etc. 点同⼠をつなぐ最短経路の発⾒,点と点がつながる可能性の予測etc. グラフ全体の特徴の評価,頻出する関係(つながり)の発⾒etc.
グラフの定義 1 Definition of Graph
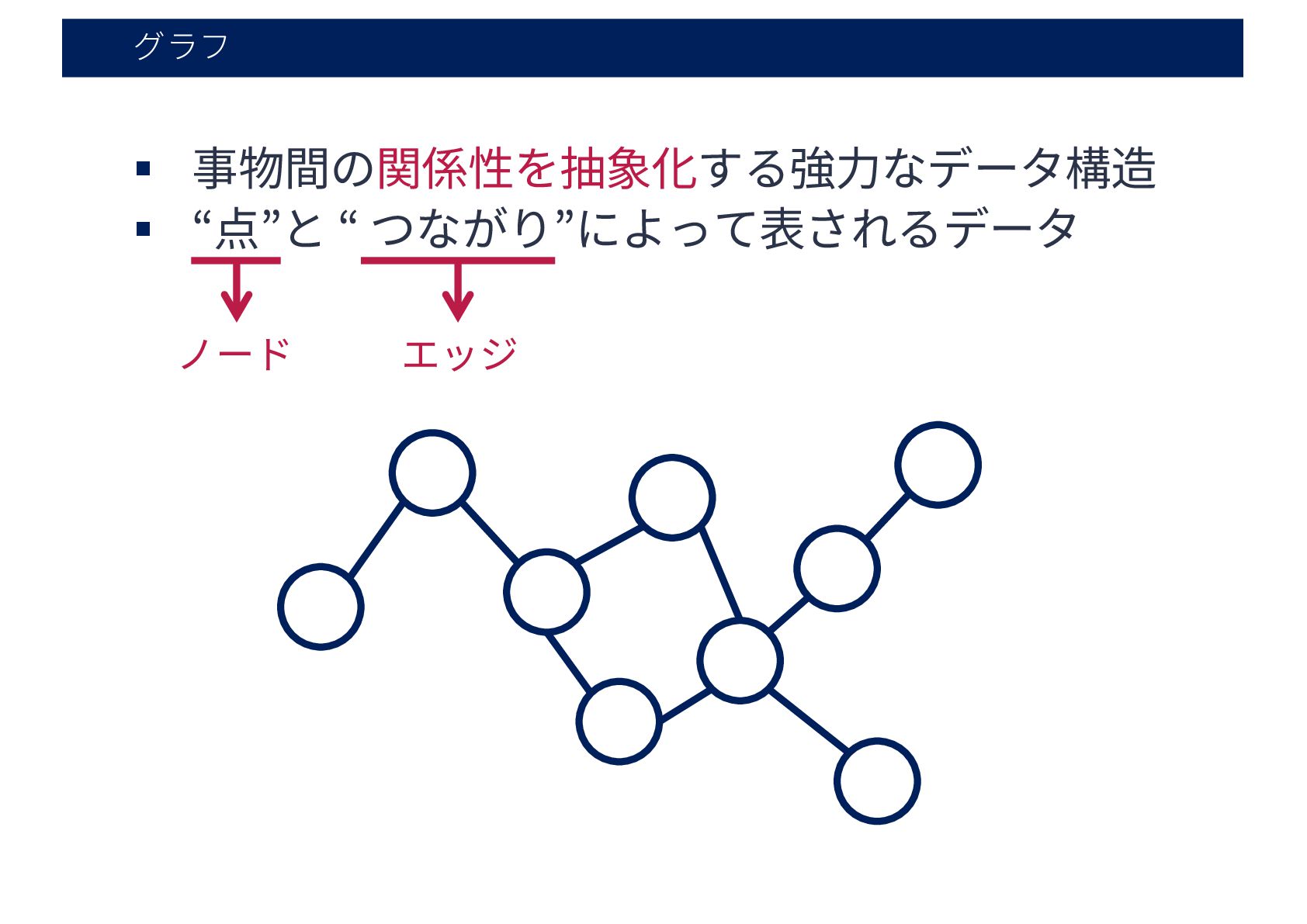
グラフ § 事物間の関係性を抽象化する強⼒なデータ構造 § “点”と “ つながり”によって表されるデータ ノード エッジ
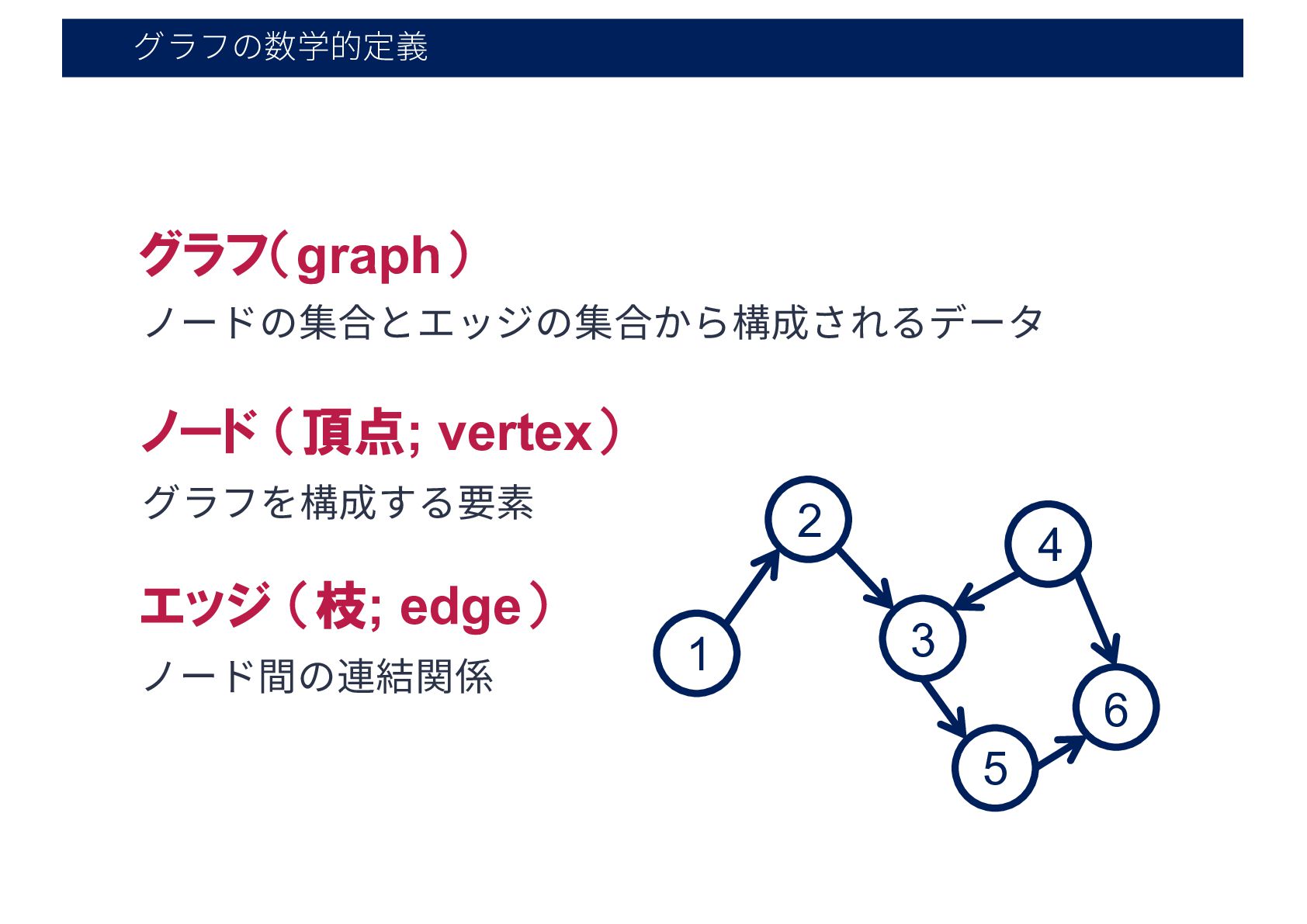
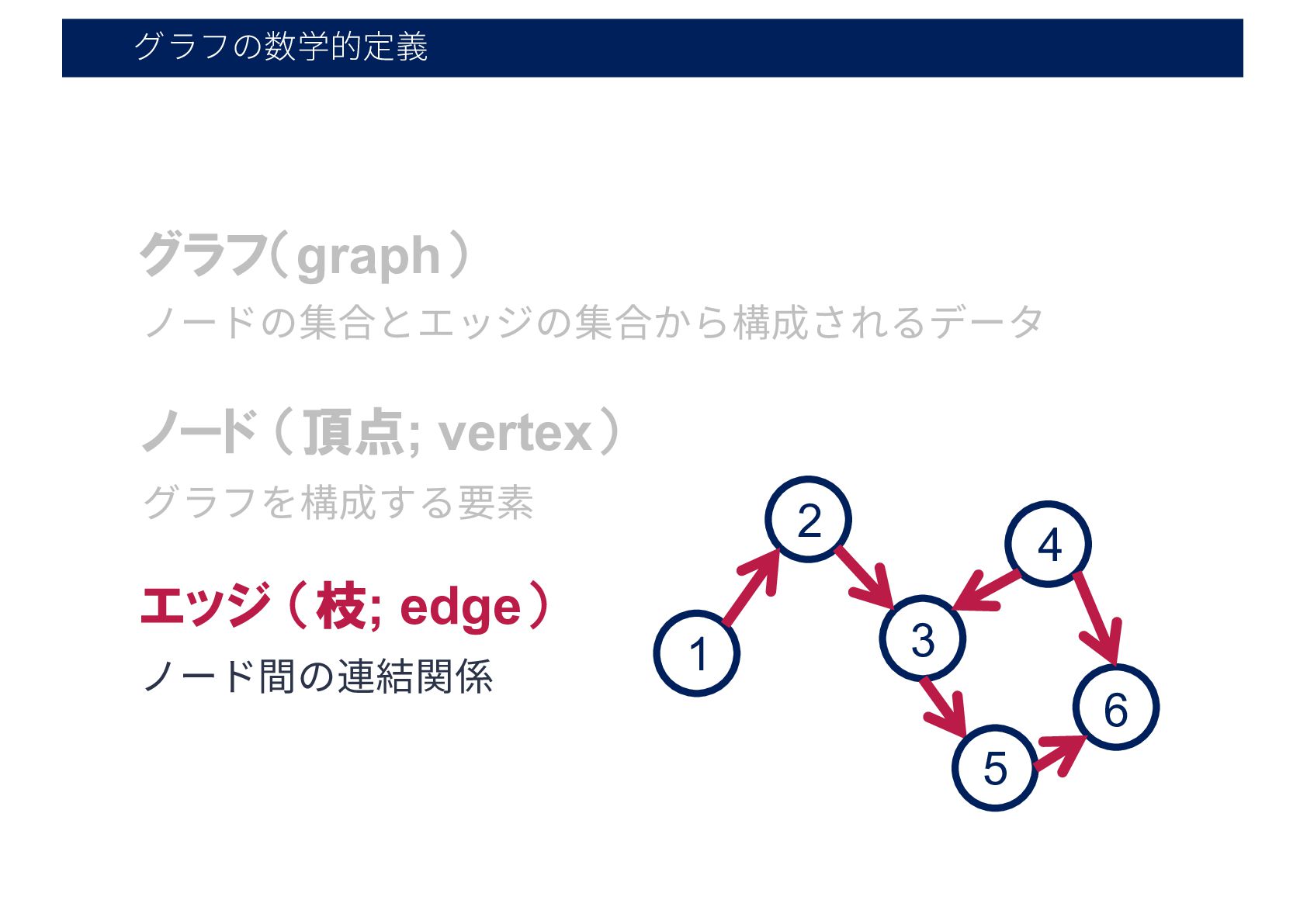
グラフの数学的定義 グラフを構成する要素 ノード (頂点; vertex) ノード間の連結関係 エッジ (枝; edge) グラフ(graph)
ノードの集合とエッジの集合から構成されるデータ 2 3 4 1 5 6
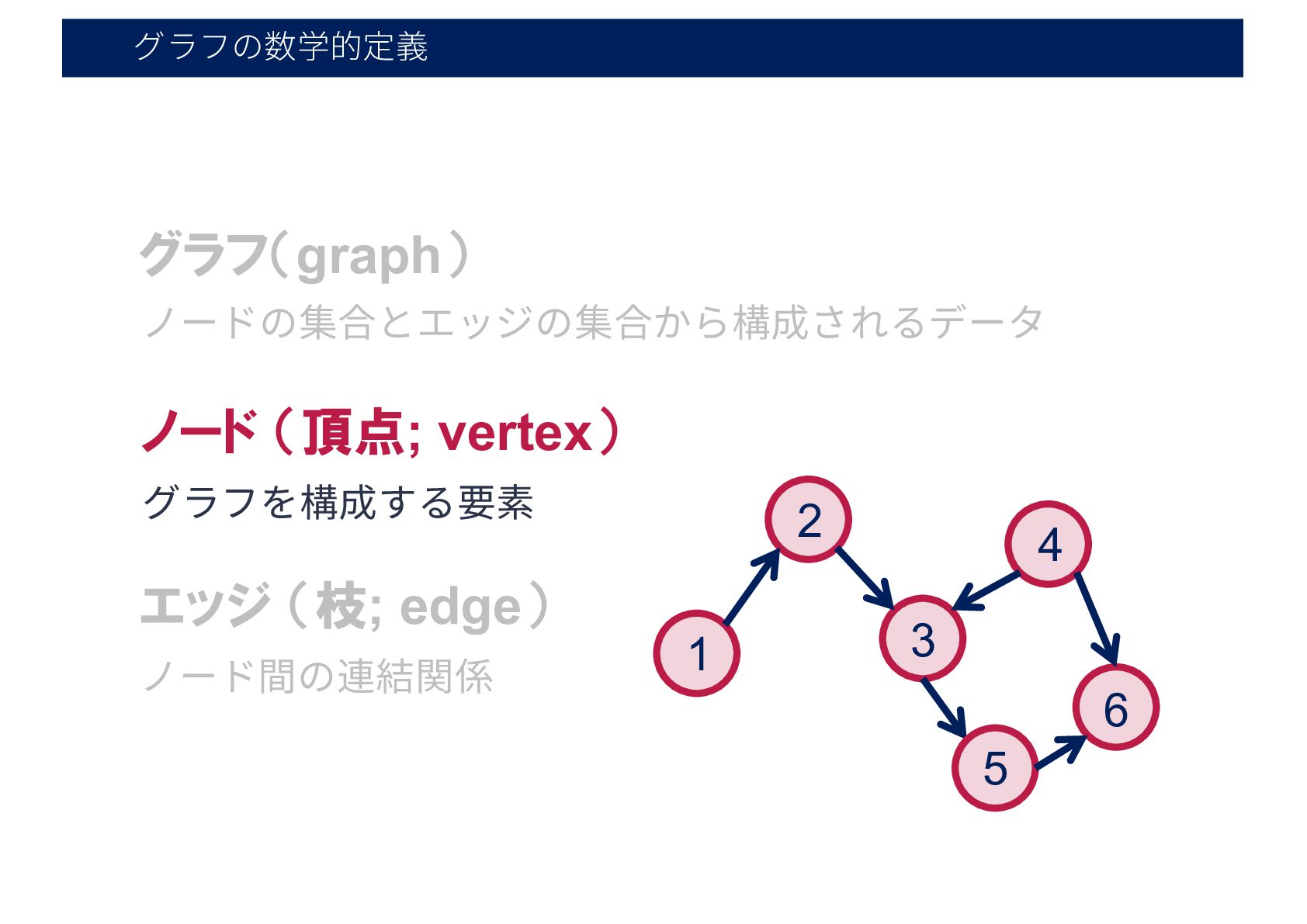
グラフの数学的定義 グラフを構成する要素 ノード (頂点; vertex) ノード間の連結関係 エッジ (枝; edge) グラフ(graph)
ノードの集合とエッジの集合から構成されるデータ 2 3 4 1 5 6
グラフの数学的定義 グラフを構成する要素 ノード (頂点; vertex) ノード間の連結関係 エッジ (枝; edge) グラフ(graph)
ノードの集合とエッジの集合から構成されるデータ 2 3 4 1 5 6
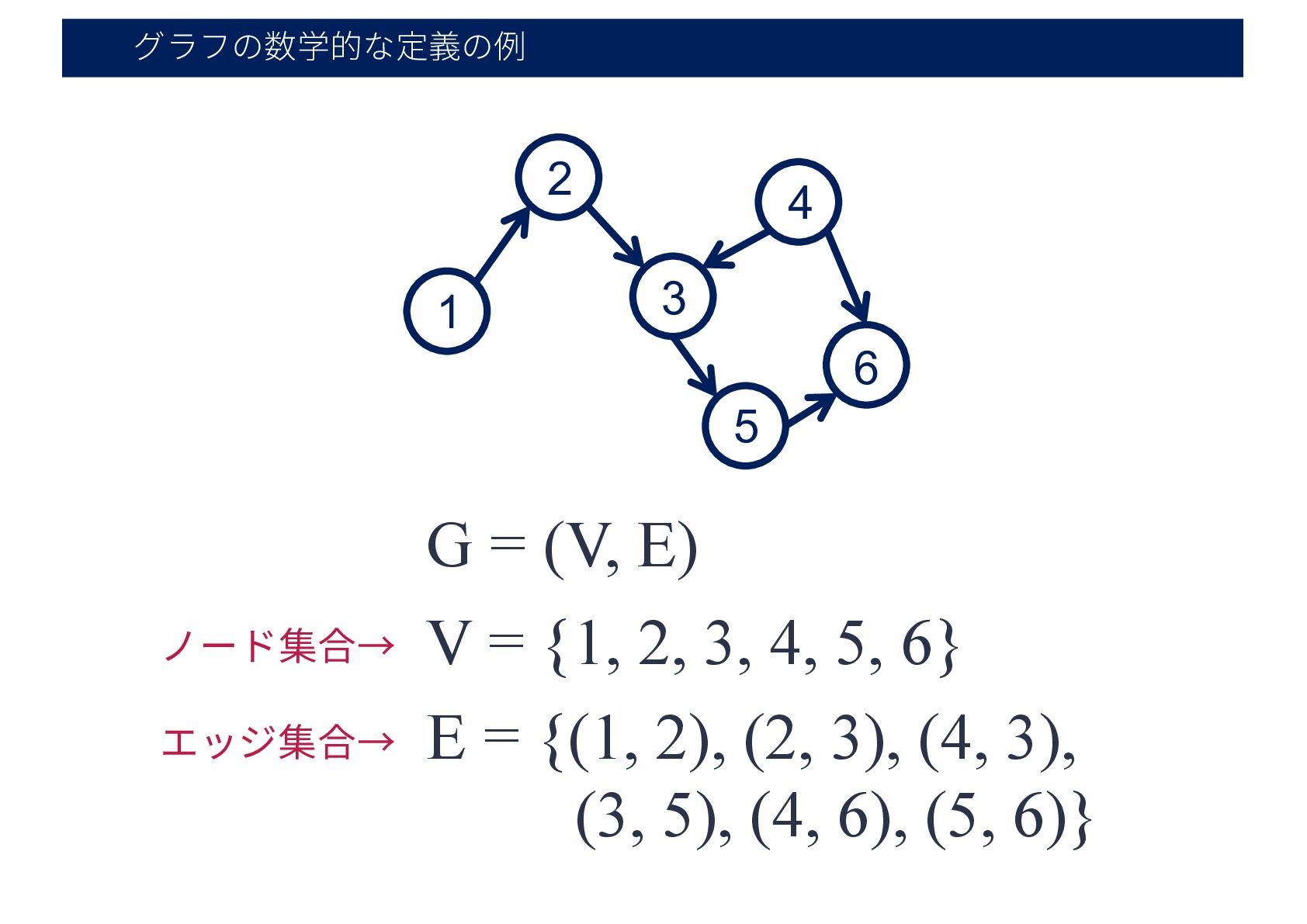
グラフの数学的な定義の例 G = (V, E) V = {1, 2, 3,
4, 5, 6} E = {(1, 2), (2, 3), (4, 3), (3, 5), (4, 6), (5, 6)} ノード集合→ エッジ集合→ 2 3 4 1 5 6
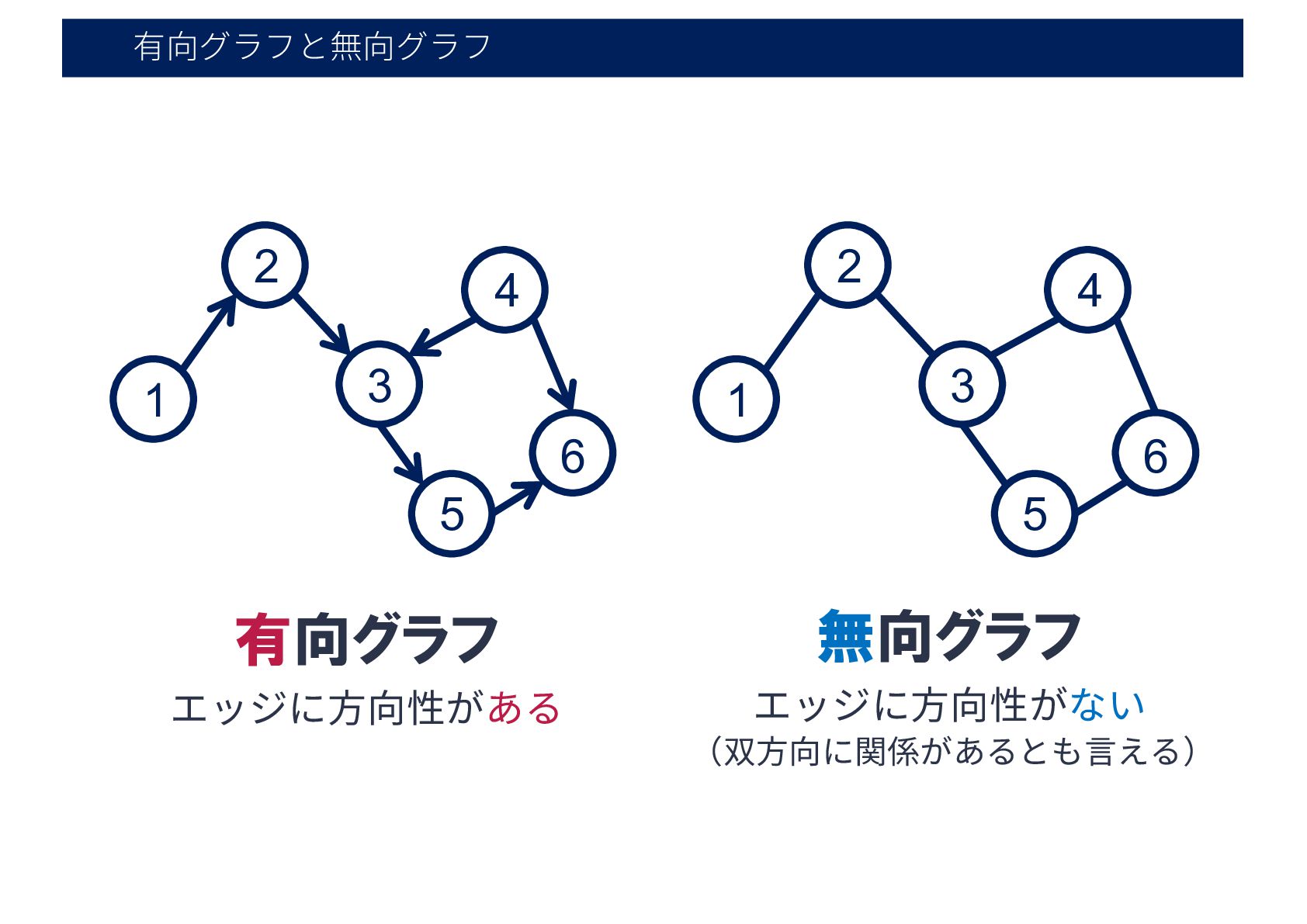
有向グラフと無向グラフ 2 3 4 1 5 6 有向グラフ エッジに⽅向性がある 2
3 4 1 5 6 無向グラフ エッジに⽅向性がない (双⽅向に関係があるとも⾔える)
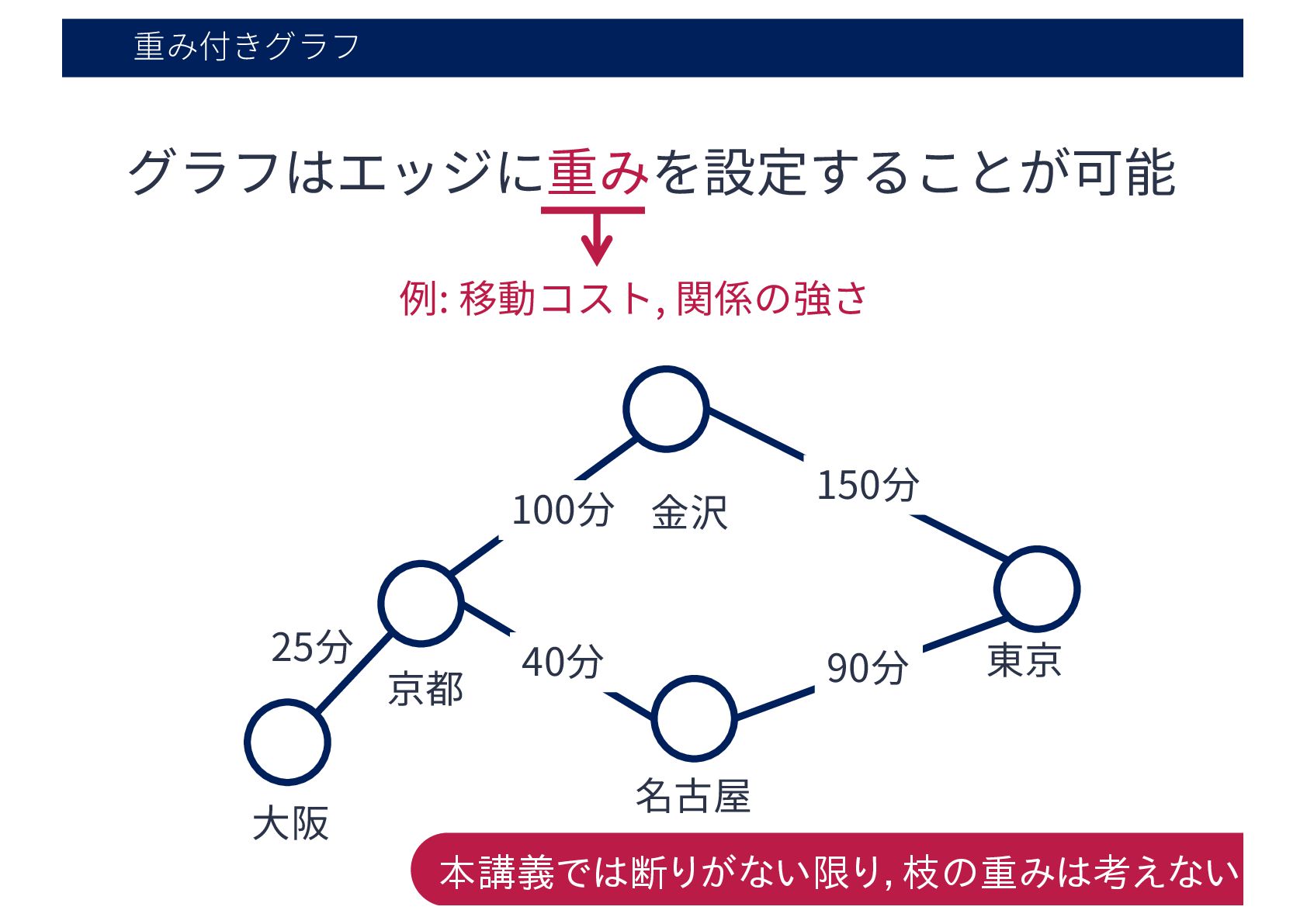
重み付きグラフ 名古屋 京都 ⼤阪 ⾦沢 東京 40分 90分 150分 100分
25分 グラフはエッジに重みを設定することが可能 例: 移動コスト, 関係の強さ 本講義では断りがない限り,枝の重みは考えない
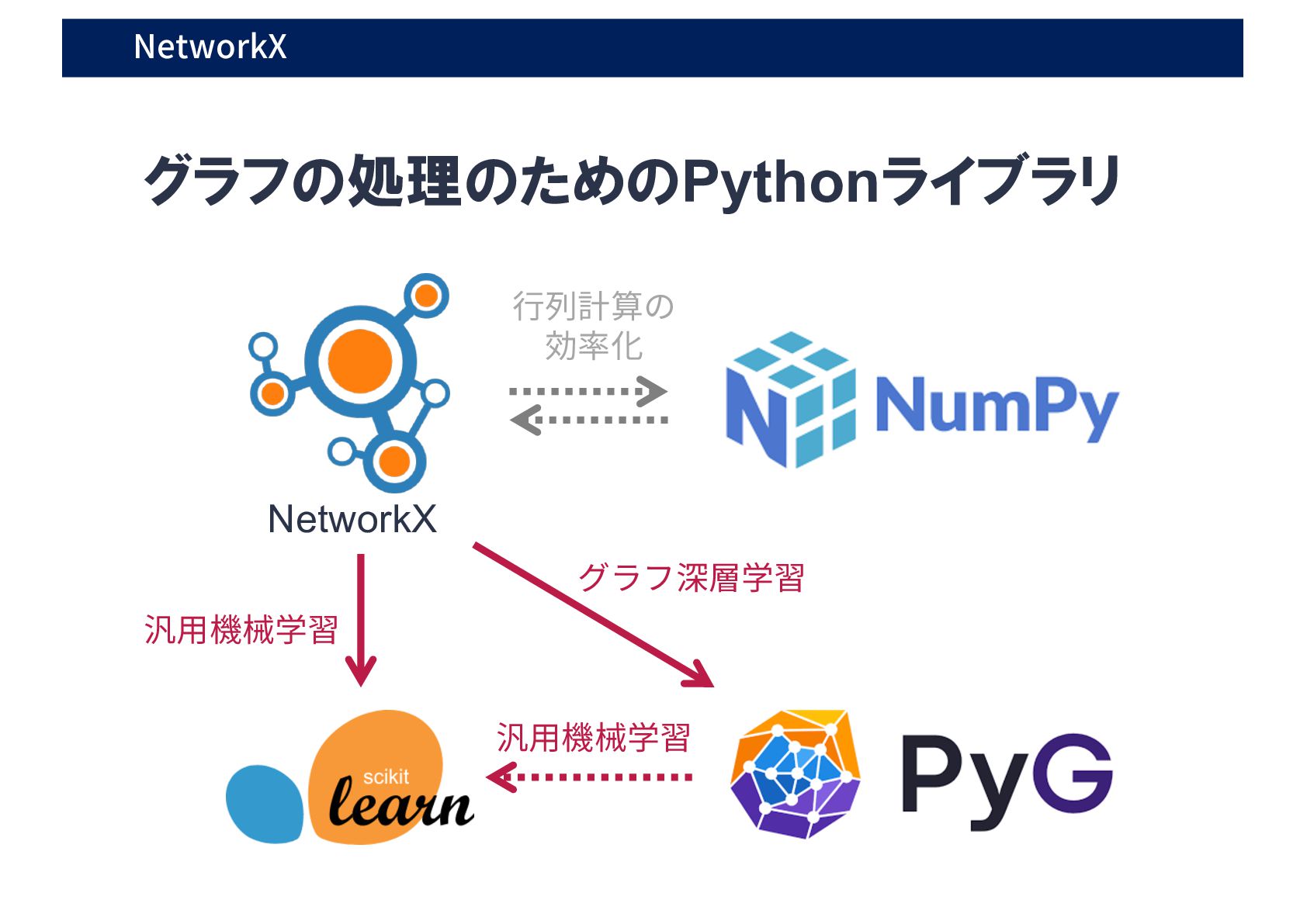
NetworkX グラフの処理のためのPythonライブラリ NetworkX ⾏列計算の 効率化 汎⽤機械学習 汎⽤機械学習 グラフ深層学習
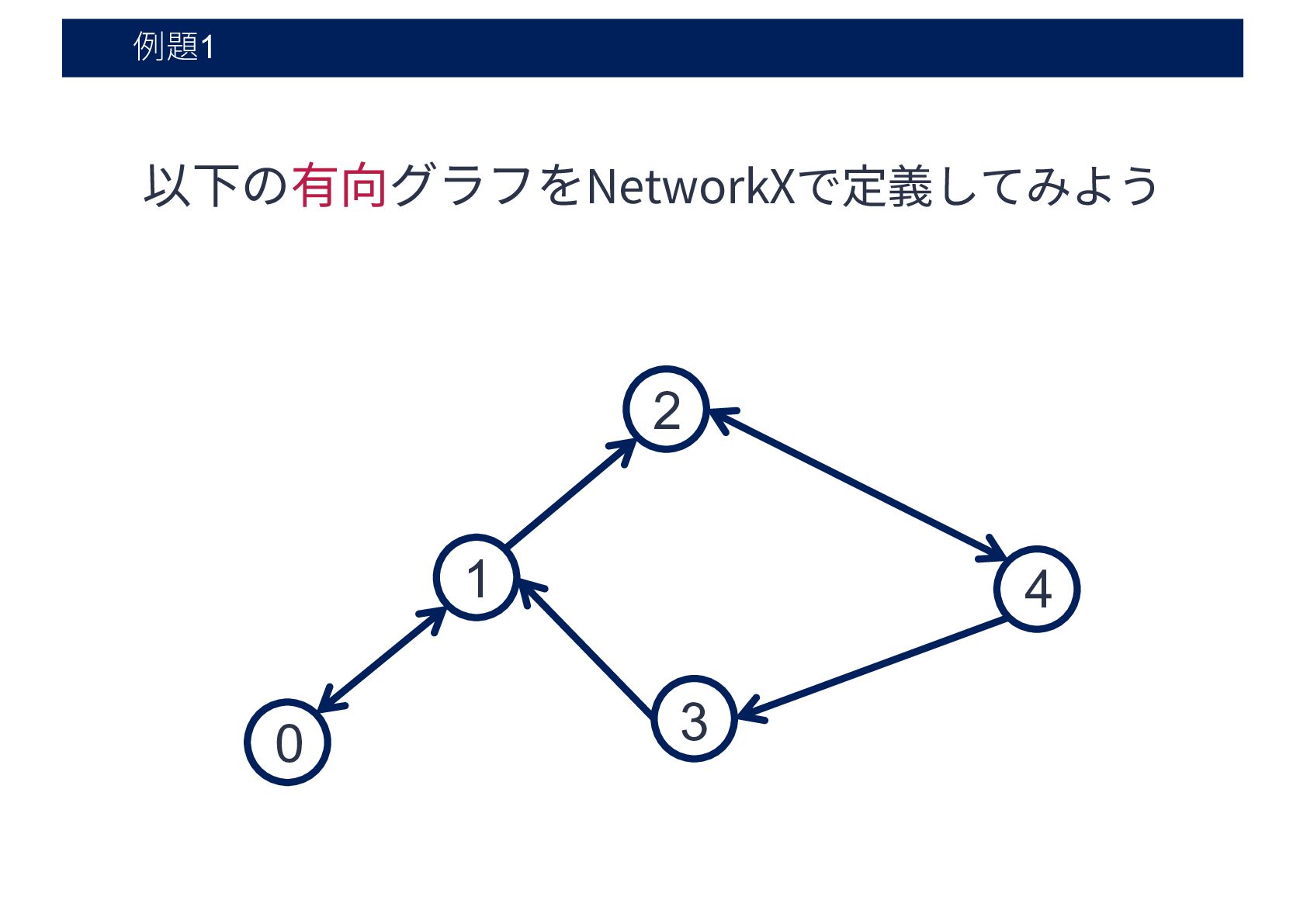
例題1 以下の有向グラフをNetworkXで定義してみよう 2 4 3 1 0
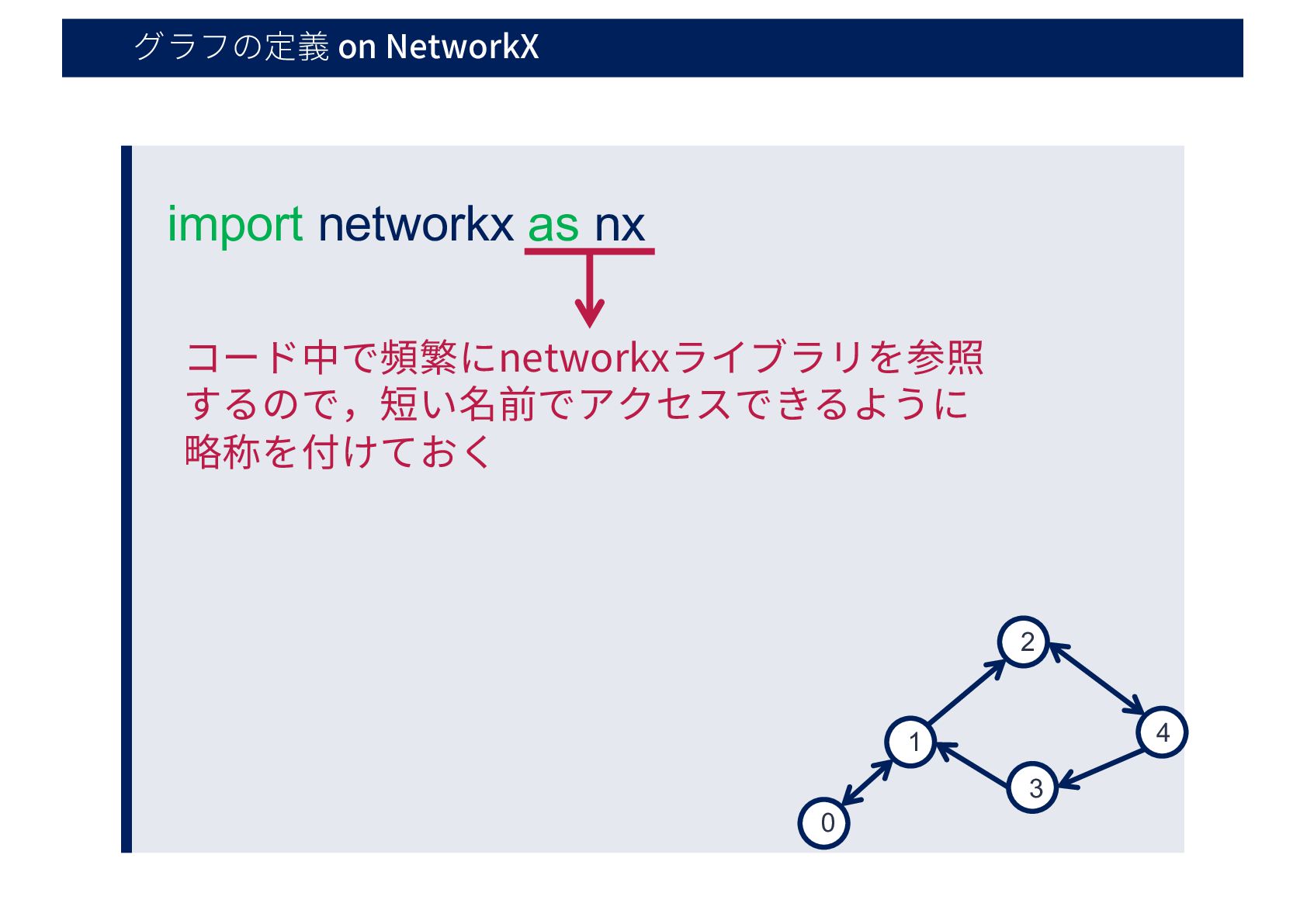
グラフの定義 on NetworkX import networkx as nx コード中で頻繁にnetworkxライブラリを参照 するので,短い名前でアクセスできるように 略称を付けておく
2 4 3 1 0
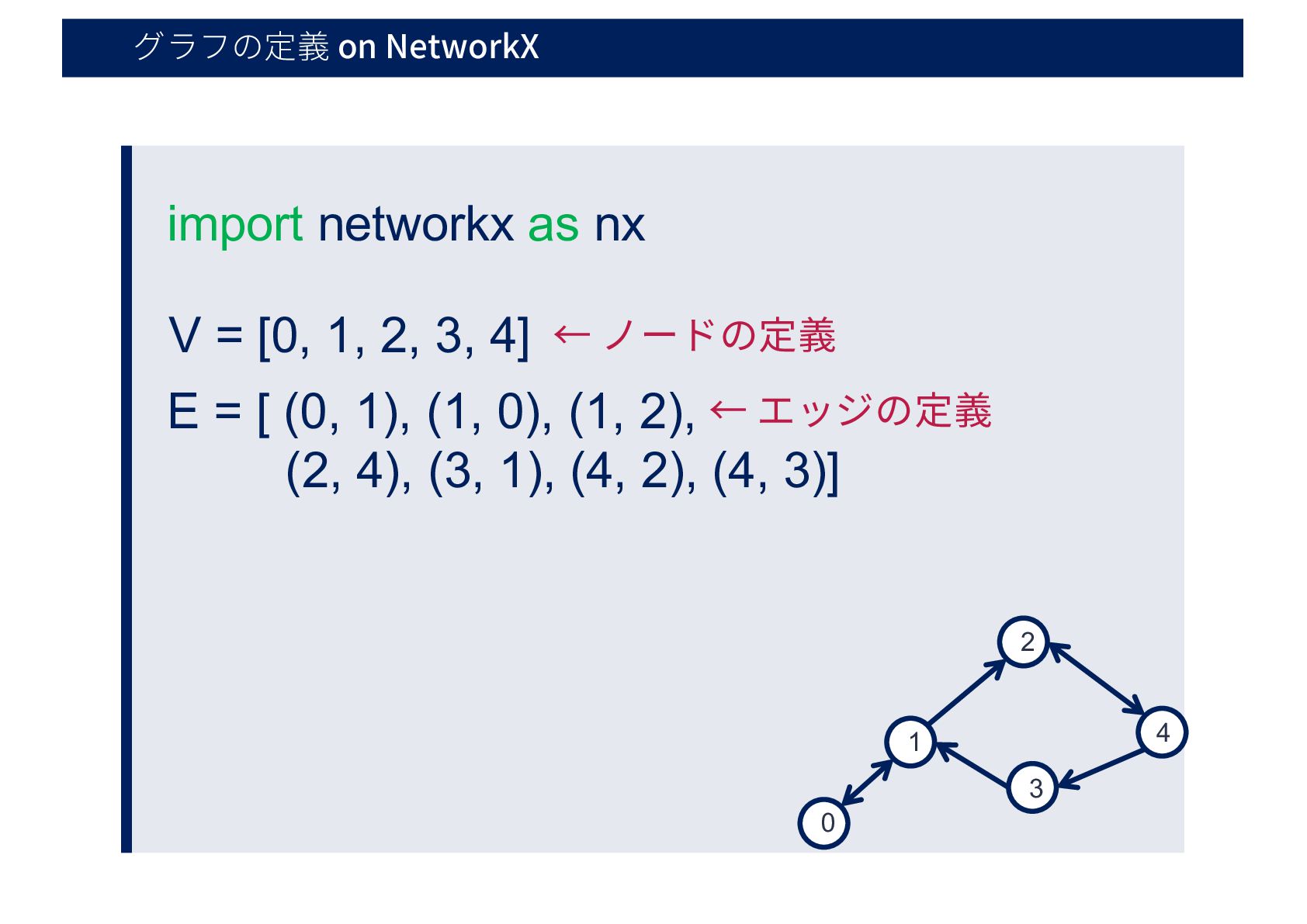
グラフの定義 on NetworkX import networkx as nx V = [0,
1, 2, 3, 4] E = [ (0, 1), (1, 0), (1, 2), (2, 4), (3, 1), (4, 2), (4, 3)] ← ノードの定義 ← エッジの定義 2 4 3 1 0
グラフの定義 on NetworkX import networkx as nx V = [0,
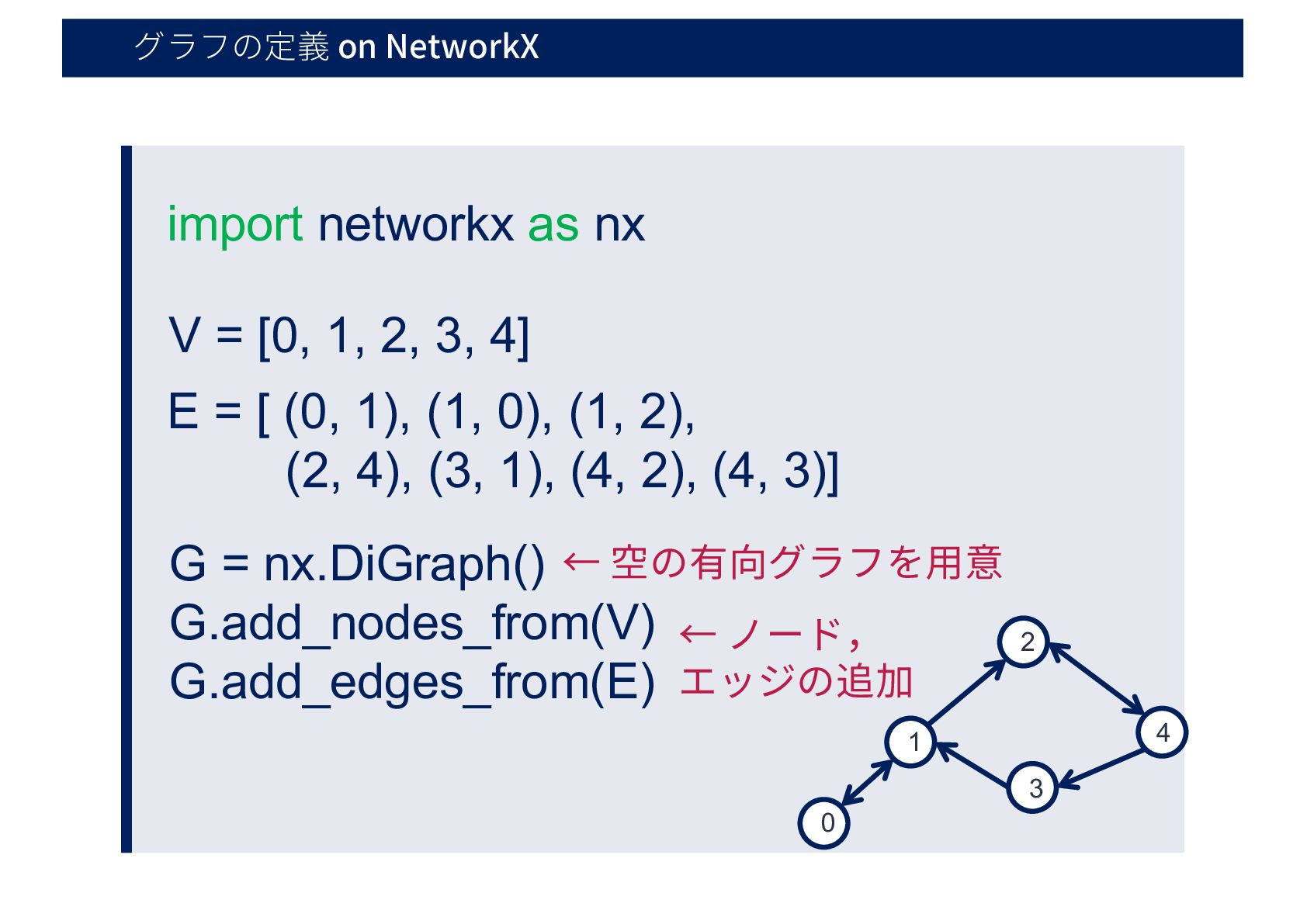
1, 2, 3, 4] E = [ (0, 1), (1, 0), (1, 2), (2, 4), (3, 1), (4, 2), (4, 3)] G = nx.DiGraph() G.add_nodes_from(V) G.add_edges_from(E) ← 空の有向グラフを⽤意 ← ノード, エッジの追加 2 4 3 1 0
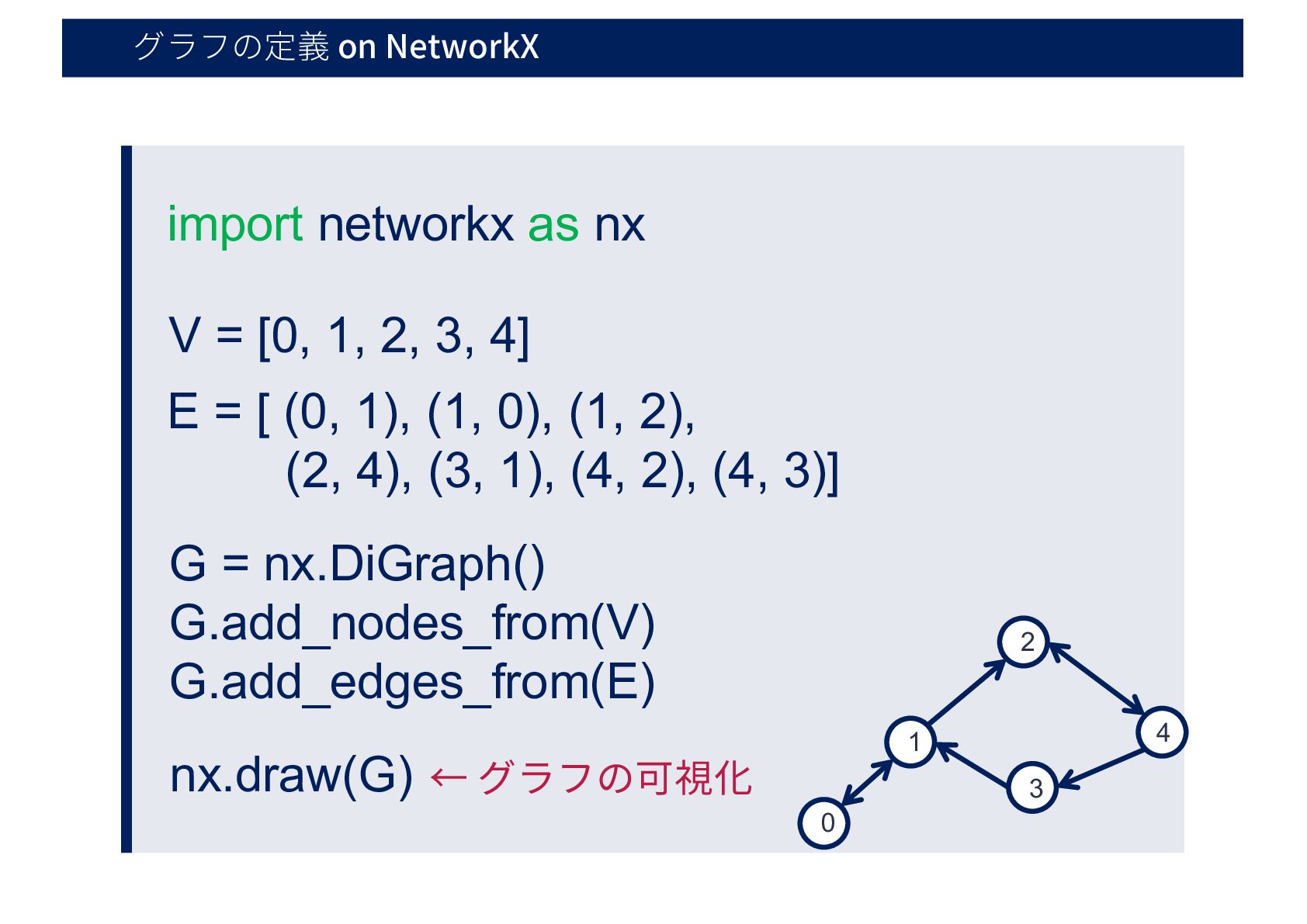
グラフの定義 on NetworkX import networkx as nx V = [0,
1, 2, 3, 4] E = [ (0, 1), (1, 0), (1, 2), (2, 4), (3, 1), (4, 2), (4, 3)] G = nx.DiGraph() G.add_nodes_from(V) G.add_edges_from(E) nx.draw(G) ← グラフの可視化 2 4 3 1 0
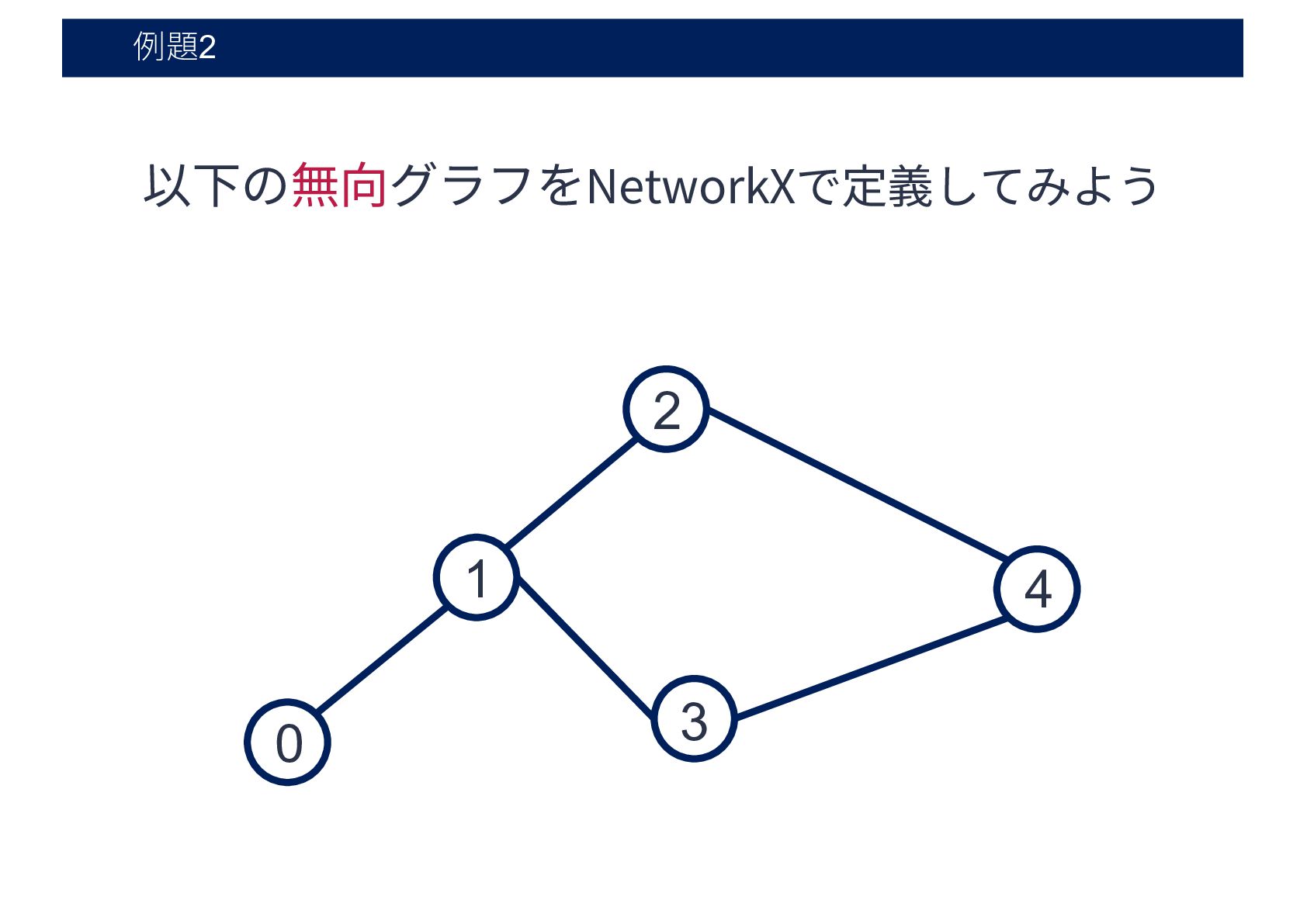
例題2 以下の無向グラフをNetworkXで定義してみよう 2 4 3 1 0
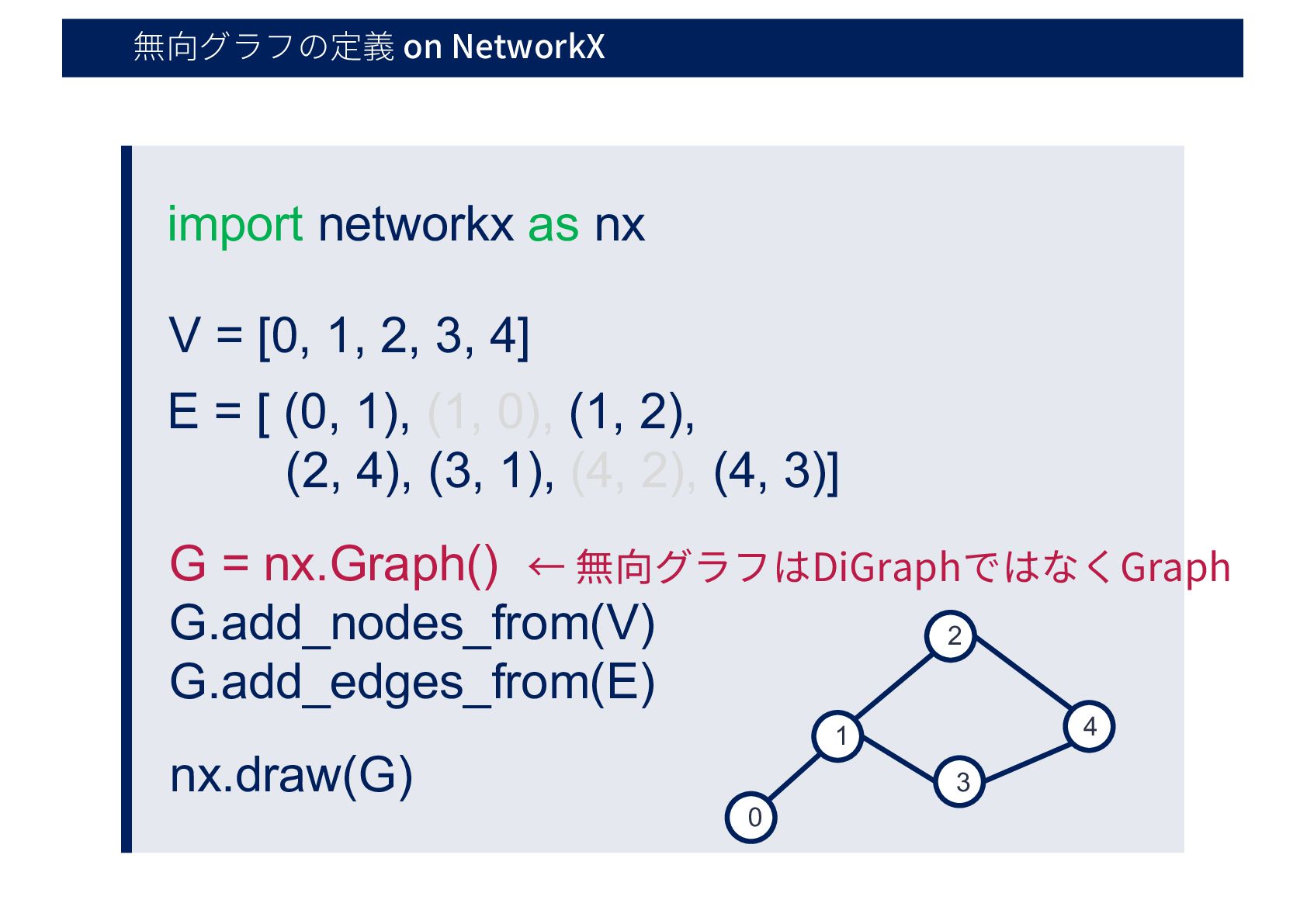
無向グラフの定義 on NetworkX import networkx as nx V = [0,
1, 2, 3, 4] E = [ (0, 1), (1, 0), (1, 2), (2, 4), (3, 1), (4, 2), (4, 3)] G = nx.Graph() G.add_nodes_from(V) G.add_edges_from(E) nx.draw(G) 2 4 3 1 0 ← 無向グラフはDiGraphではなくGraph
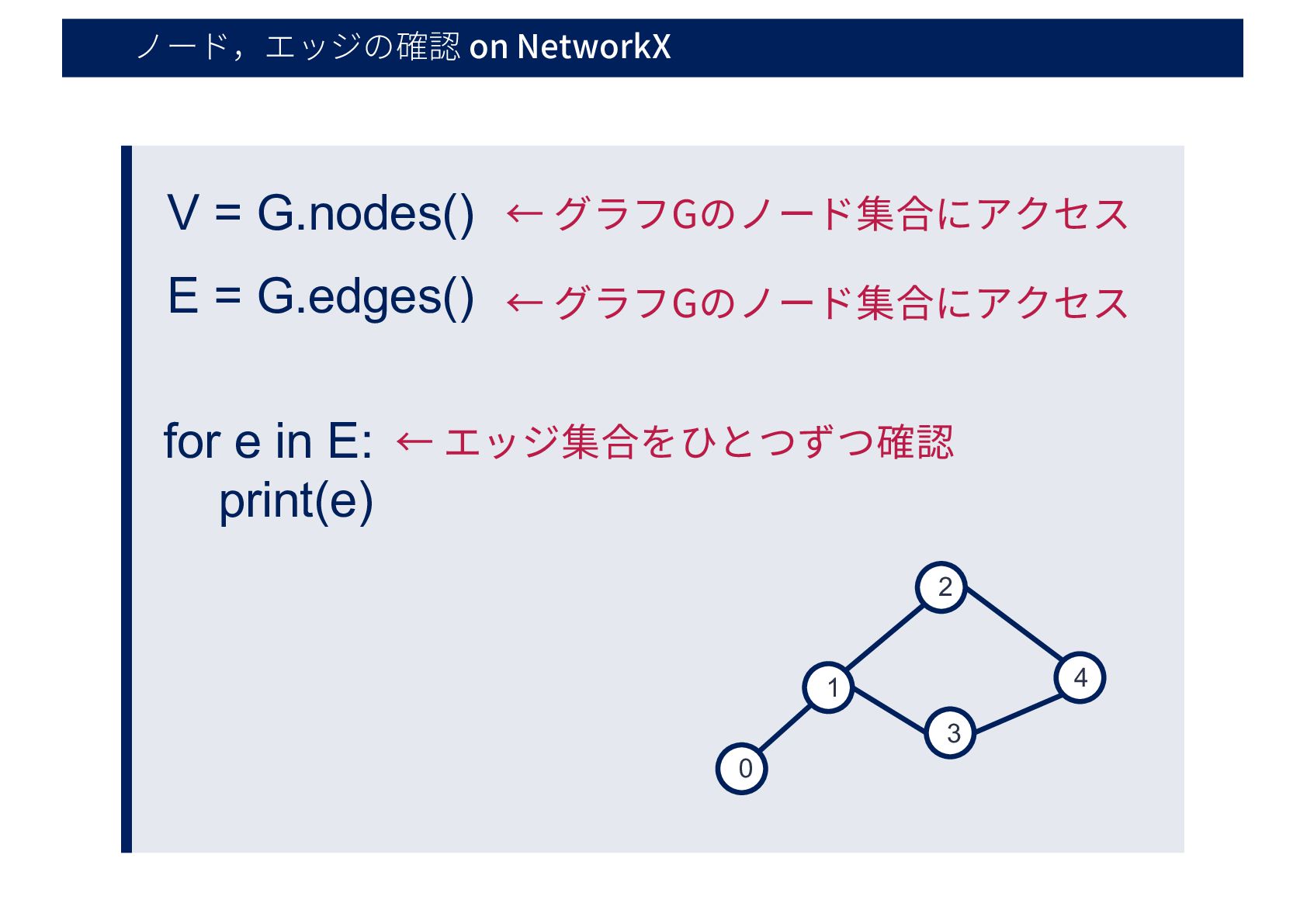
ノード,エッジの確認 on NetworkX V = G.nodes() 2 4 3 1
0 ← グラフGのノード集合にアクセス E = G.edges() ← グラフGのノード集合にアクセス for e in E: print(e) ← エッジ集合をひとつずつ確認
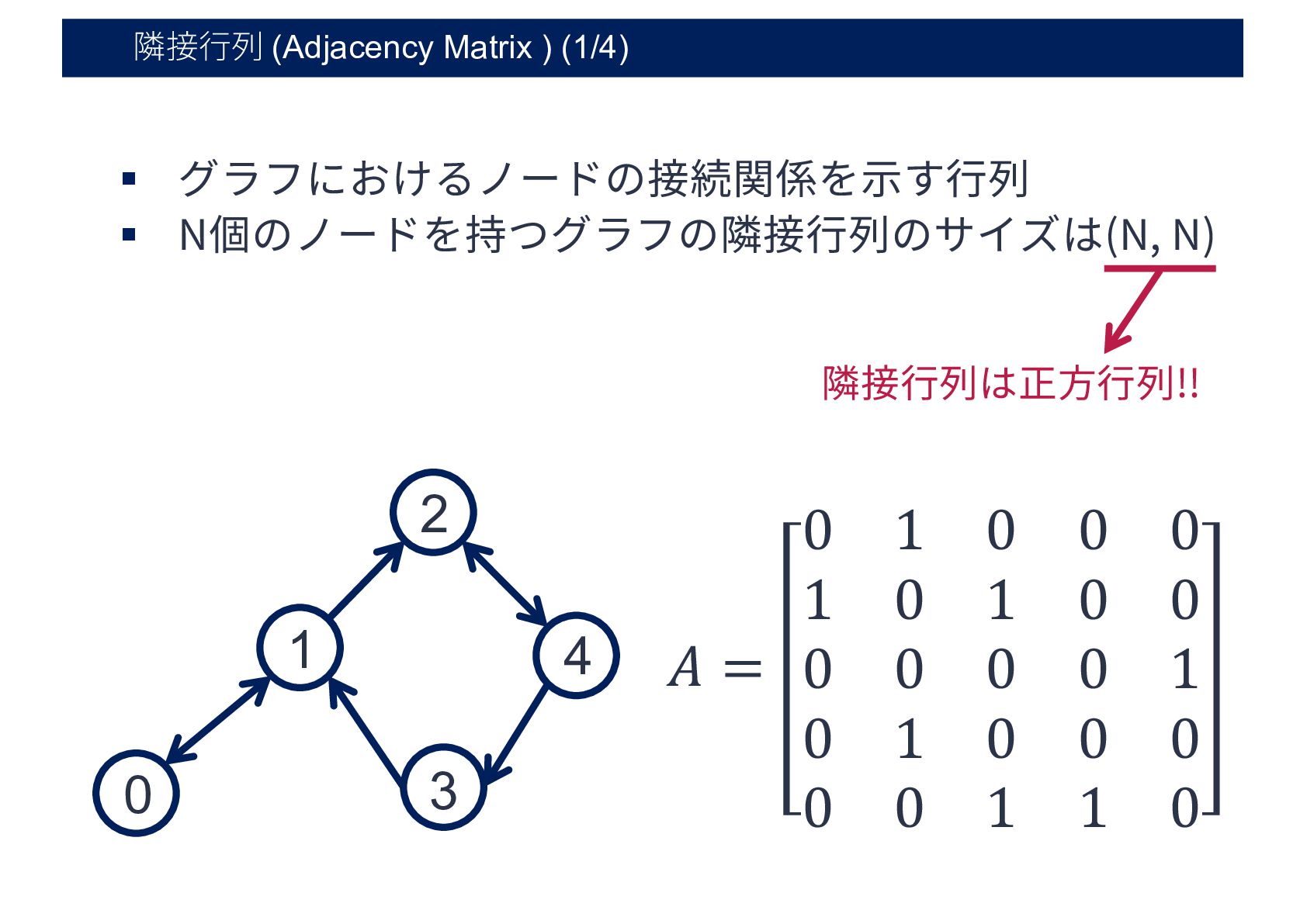
隣接⾏列 (Adjacency Matrix ) (1/4) § グラフにおけるノードの接続関係を⽰す⾏列 § N個のノードを持つグラフの隣接⾏列のサイズは(N, N)
隣接⾏列は正⽅⾏列!! 2 4 3 1 0 𝐴 = 0 1 0 0 0 1 0 1 0 0 0 0 0 0 1 0 1 0 0 0 0 0 1 1 0
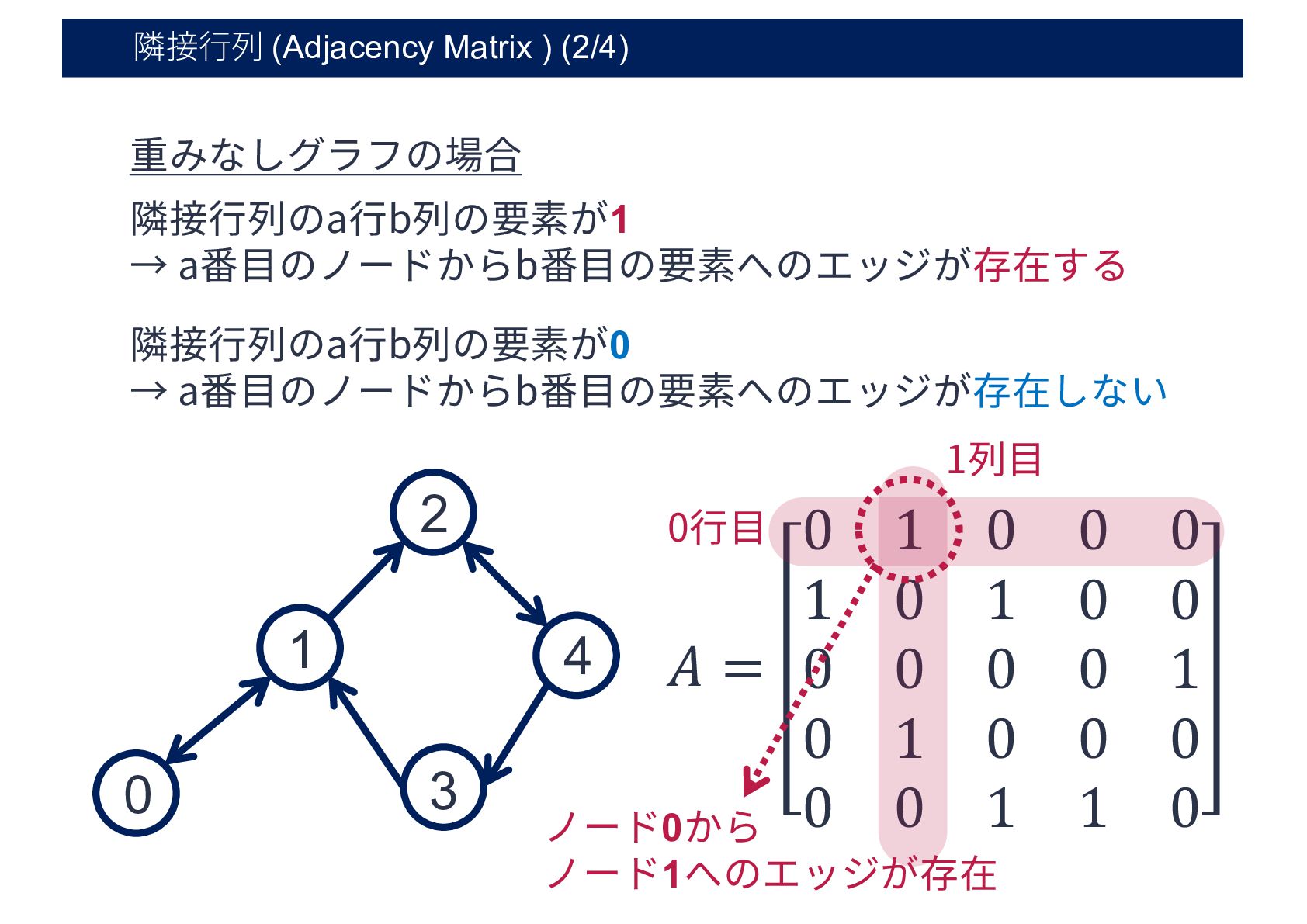
隣接⾏列 (Adjacency Matrix ) (2/4) 2 4 3 1 0
𝐴 = 0 1 0 0 0 1 0 1 0 0 0 0 0 0 1 0 1 0 0 0 0 0 1 1 0 重みなしグラフの場合 隣接⾏列のa⾏b列の要素が1 → a番⽬のノードからb番⽬の要素へのエッジが存在する 隣接⾏列のa⾏b列の要素が0 → a番⽬のノードからb番⽬の要素へのエッジが存在しない 0⾏⽬ 1列⽬ ノード0から ノード1へのエッジが存在
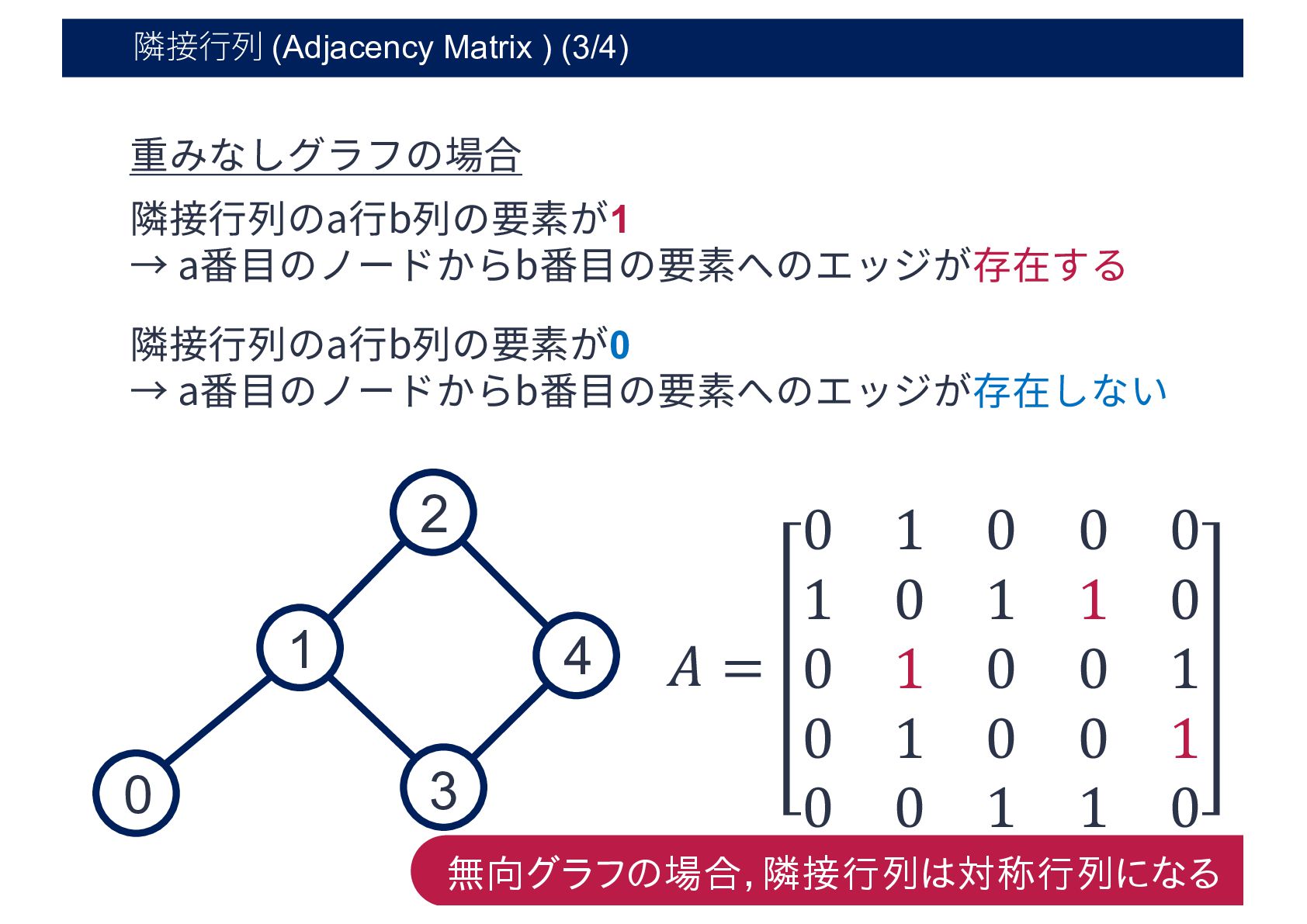
隣接⾏列 (Adjacency Matrix ) (3/4) 2 4 3 1 0
𝐴 = 0 1 0 0 0 1 0 1 1 0 0 1 0 0 1 0 1 0 0 1 0 0 1 1 0 重みなしグラフの場合 隣接⾏列のa⾏b列の要素が1 → a番⽬のノードからb番⽬の要素へのエッジが存在する 隣接⾏列のa⾏b列の要素が0 → a番⽬のノードからb番⽬の要素へのエッジが存在しない 無向グラフの場合,隣接行列は対称行列になる
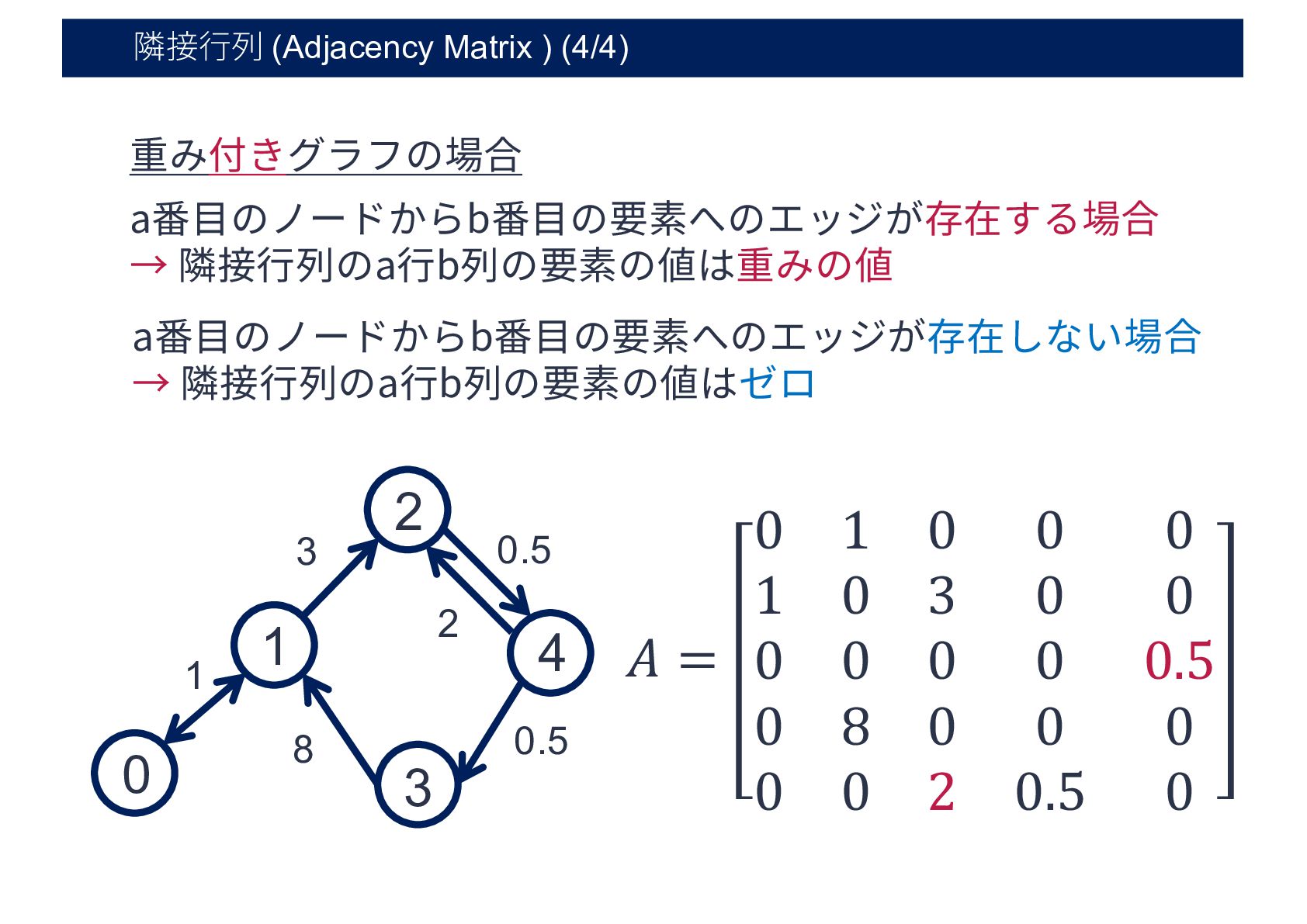
隣接⾏列 (Adjacency Matrix ) (4/4) 𝐴 = 0 1 0
0 0 1 0 3 0 0 0 0 0 0 0.5 0 8 0 0 0 0 0 2 0.5 0 重み付きグラフの場合 a番⽬のノードからb番⽬の要素へのエッジが存在する場合 → 隣接⾏列のa⾏b列の要素の値は重みの値 a番⽬のノードからb番⽬の要素へのエッジが存在しない場合 → 隣接⾏列のa⾏b列の要素の値はゼロ 2 4 3 1 0 1 3 0.5 0.5 2 8
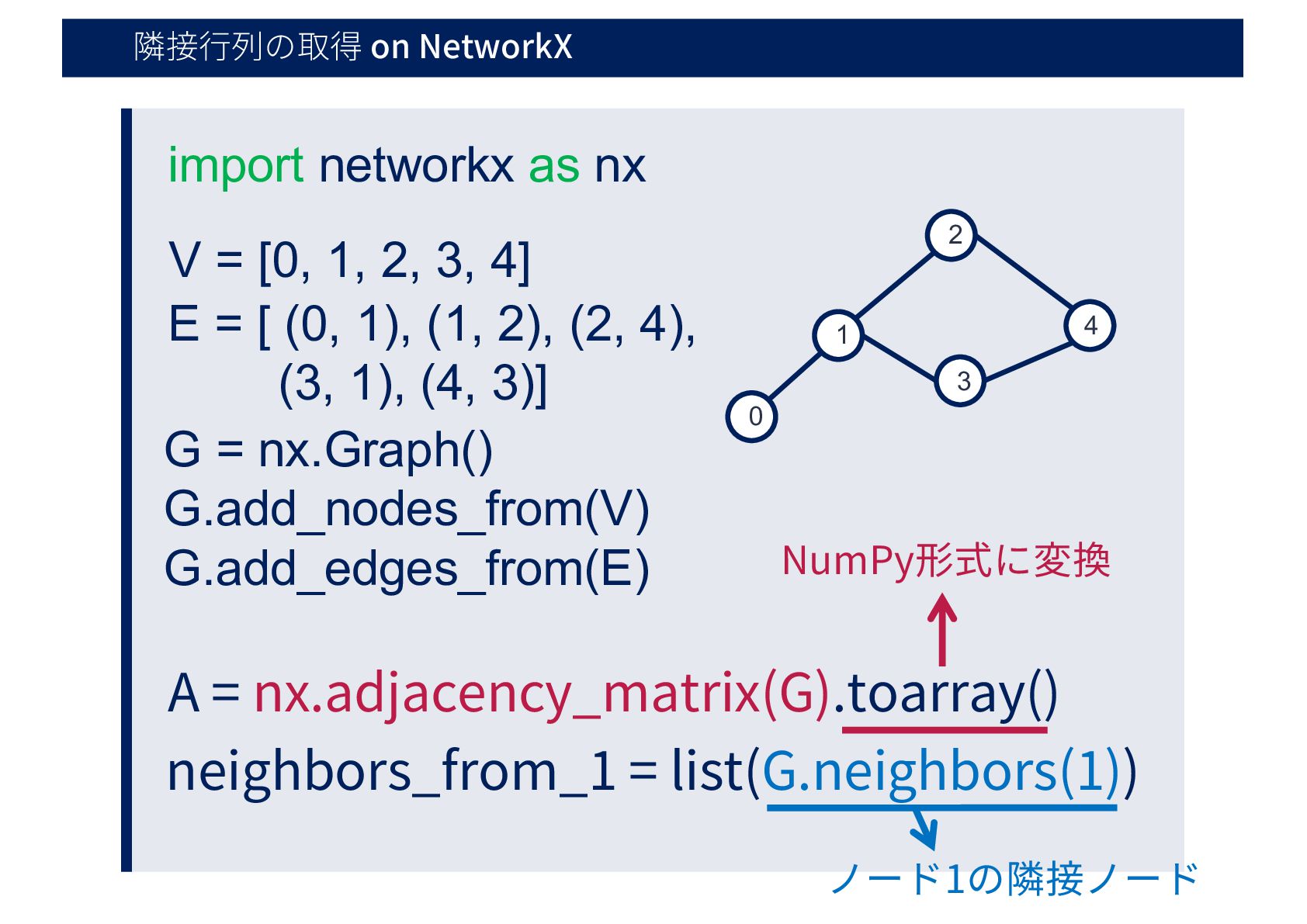
隣接⾏列の取得 on NetworkX 2 4 3 1 0 import networkx
as nx V = [0, 1, 2, 3, 4] E = [ (0, 1), (1, 2), (2, 4), (3, 1), (4, 3)] G = nx.Graph() G.add_nodes_from(V) G.add_edges_from(E) A = nx.adjacency_matrix(G).toarray() NumPy形式に変換 neighbors_from_1 = list(G.neighbors(1)) ノード1の隣接ノード
Hands-on タイム 以下のURLにアクセスして, 第9回のクイズQ1を解いてみよう https://graphnote.hontolab.org/ 37
経路 2 Path
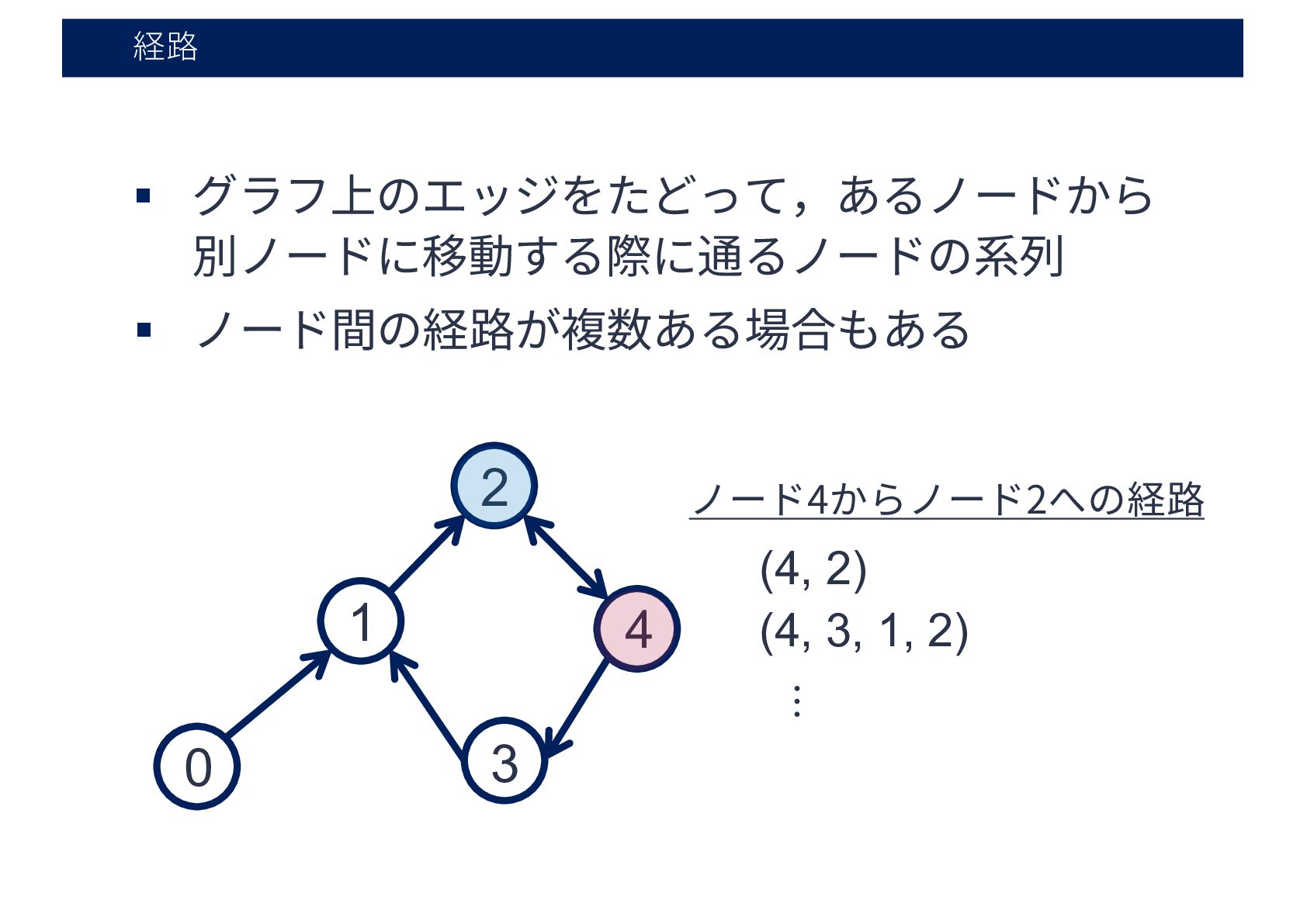
経路 2 4 3 1 0 § グラフ上のエッジをたどって,あるノードから 別ノードに移動する際に通るノードの系列 §
ノード間の経路が複数ある場合もある ノード4からノード2への経路 (4, 2) (4, 3, 1, 2) …
到達可能性 ノード nx からノード ny への経路が存在するとき nx から ny へ到達可能という
ノード0からノード3へは 到達可能 ノード3からノード0へは 到達不可能 2 4 3 1 0
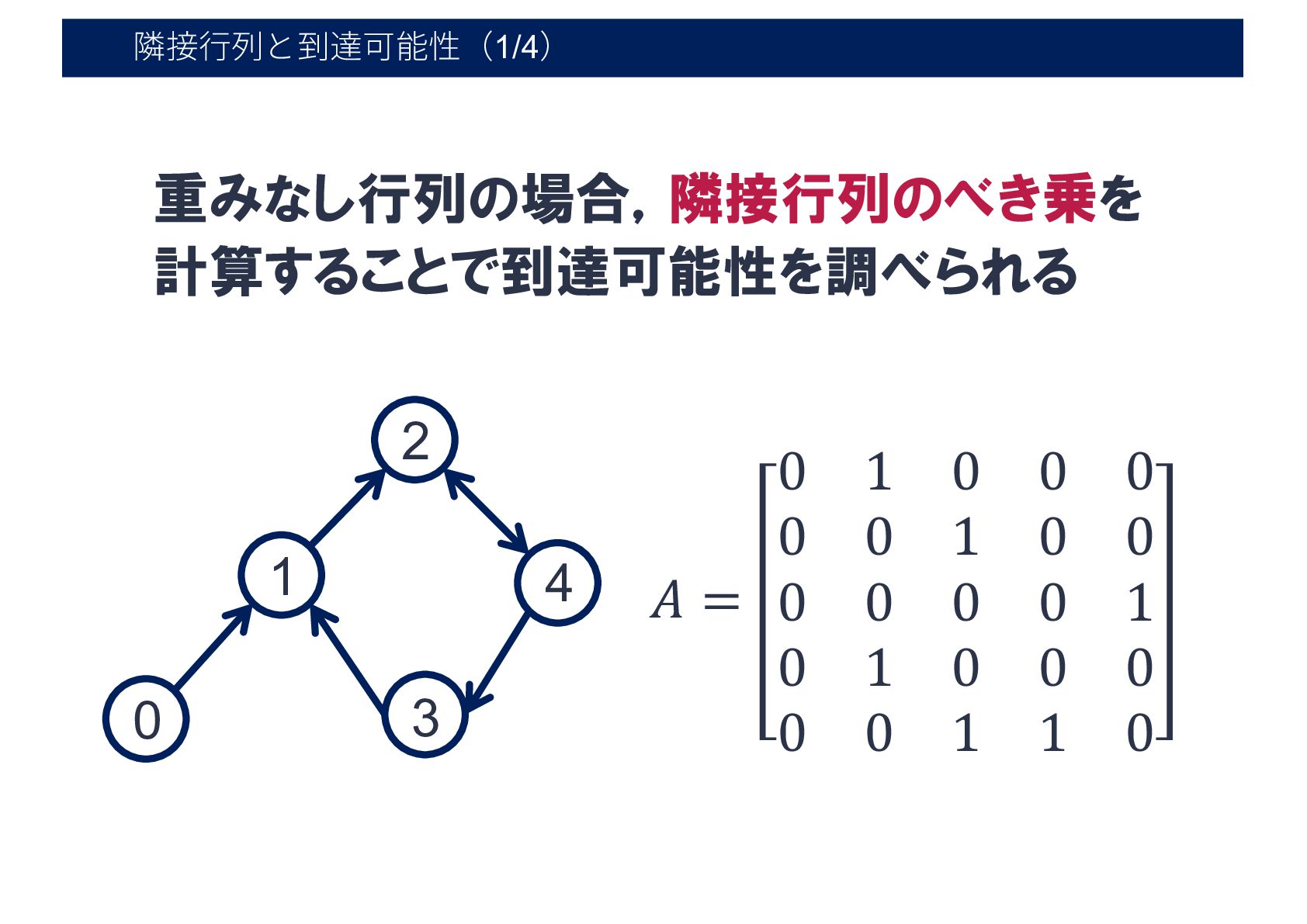
隣接⾏列と到達可能性(1/4) 2 4 3 1 0 𝐴 = 0 1
0 0 0 0 0 1 0 0 0 0 0 0 1 0 1 0 0 0 0 0 1 1 0 重みなし行列の場合,隣接行列のべき乗を 計算することで到達可能性を調べられる
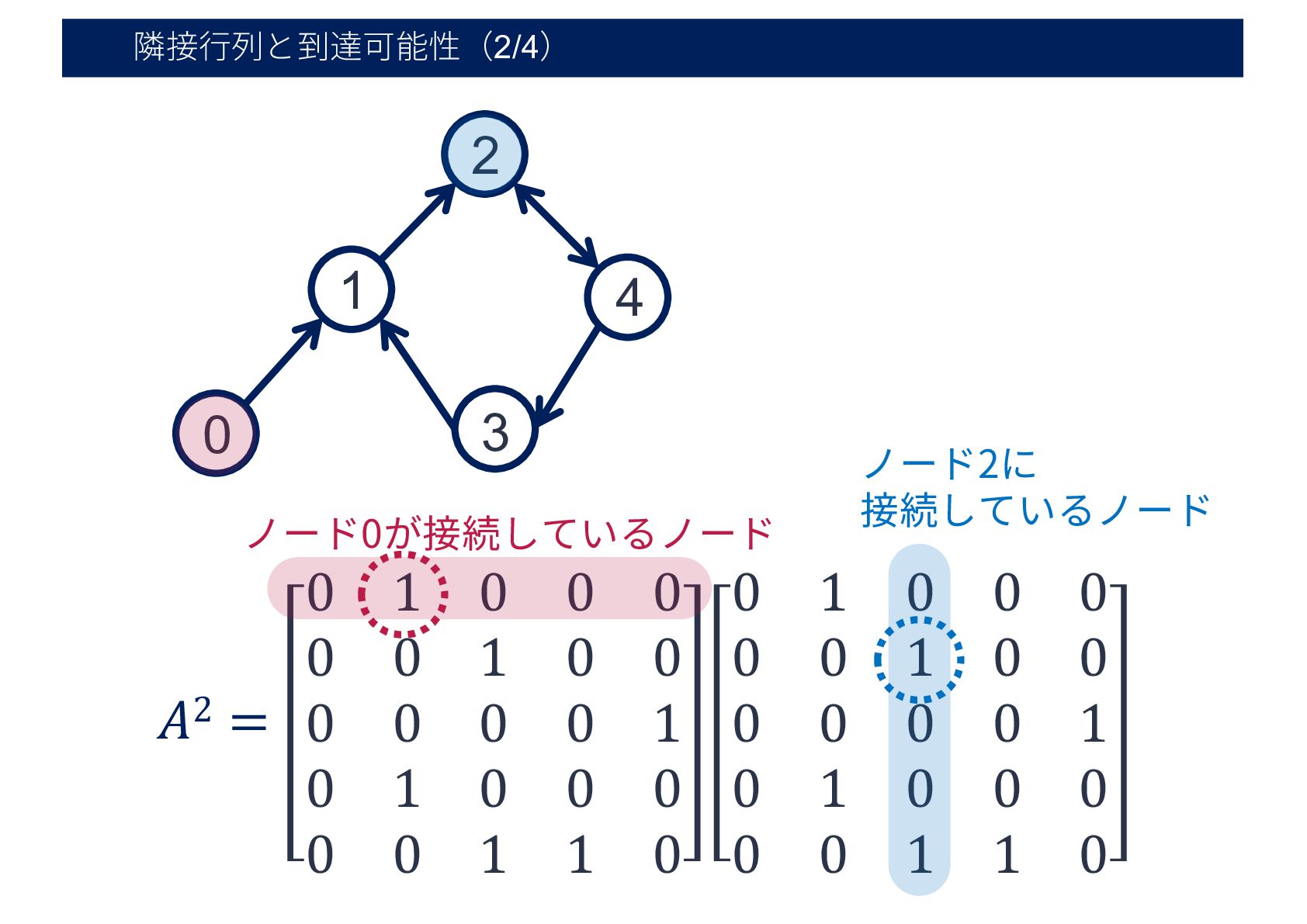
隣接⾏列と到達可能性(2/4) 2 4 3 1 0 𝐴2 = 0 1
0 0 0 0 0 1 0 0 0 0 0 0 1 0 1 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0 1 0 1 0 0 0 0 0 1 1 0 ノード0が接続しているノード ノード2に 接続しているノード
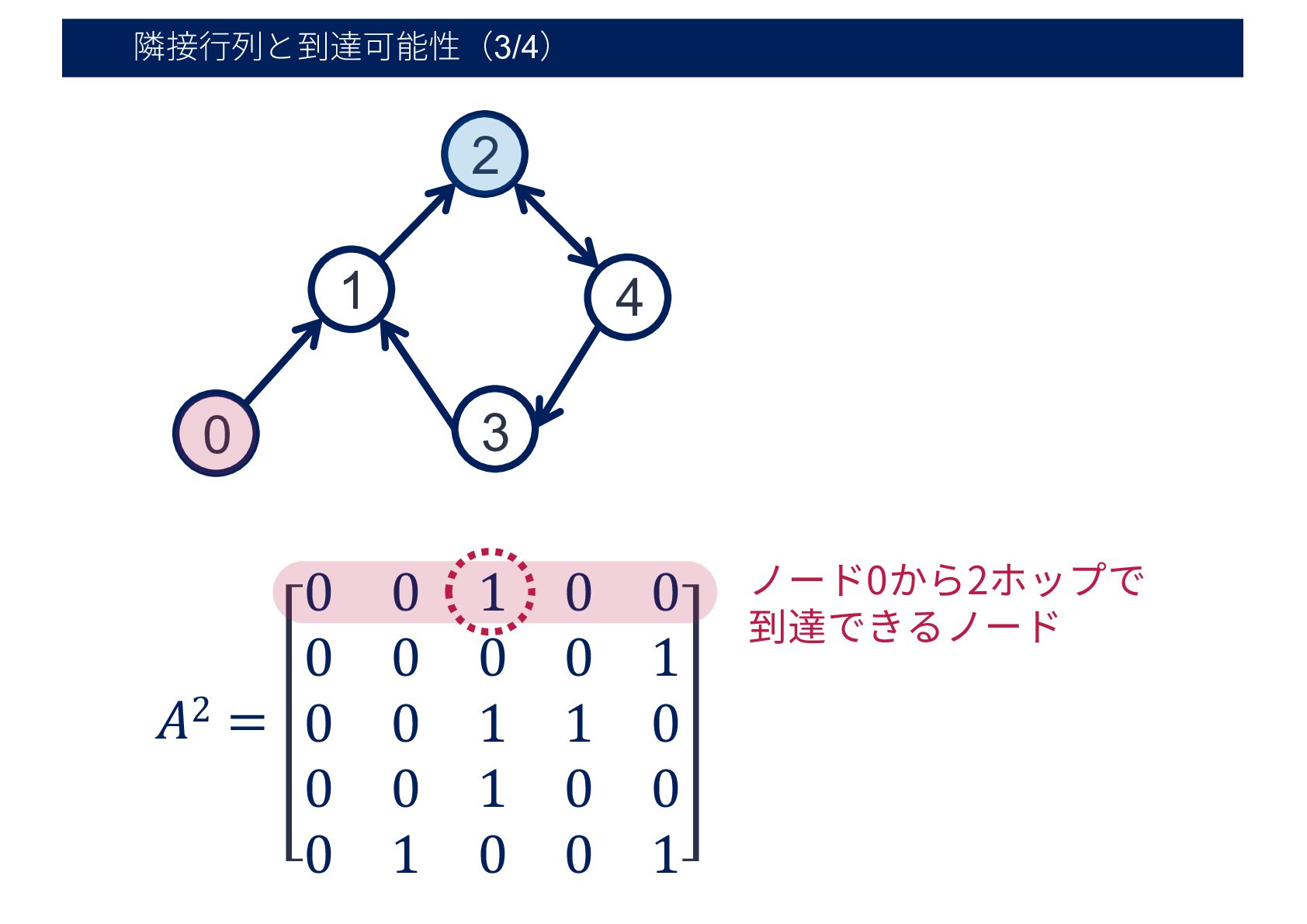
隣接⾏列と到達可能性(3/4) 2 4 3 1 0 𝐴2 = 0 0
1 0 0 0 0 0 0 1 0 0 1 1 0 0 0 1 0 0 0 1 0 0 1 ノード0から2ホップで 到達できるノードとその数
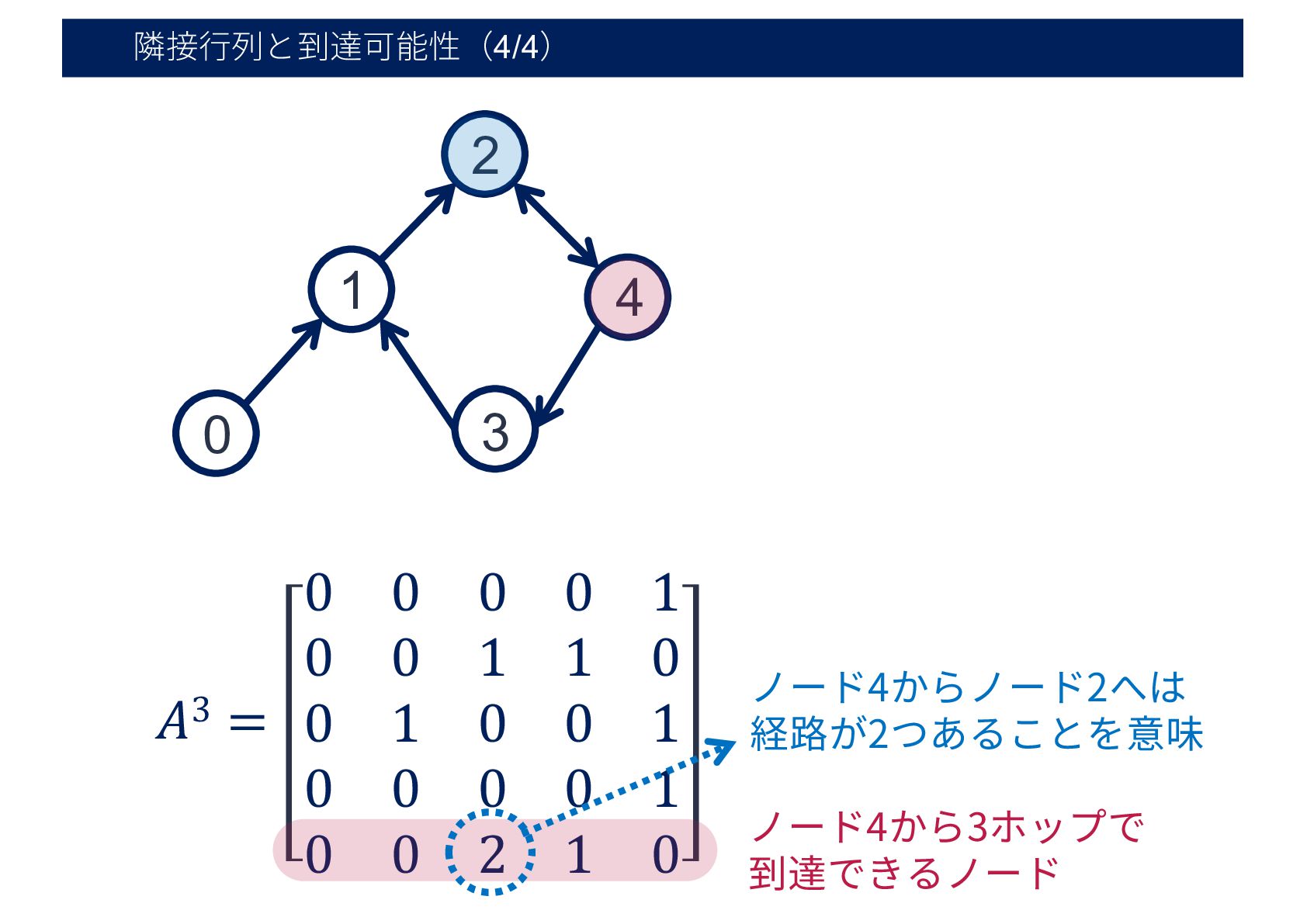
隣接⾏列と到達可能性(4/4) 2 4 3 1 0 𝐴3 = 0 0
0 0 1 0 0 1 1 0 0 1 0 0 1 0 0 0 0 1 0 0 2 1 0 ノード4から3ホップで 到達できるノードとその数 ノード4からノード2へは 経路が2つあることを意味
Hands-on タイム 以下のURLにアクセスして, 第9回のクイズQ2を解いてみよう https://graphnote.hontolab.org/ 45
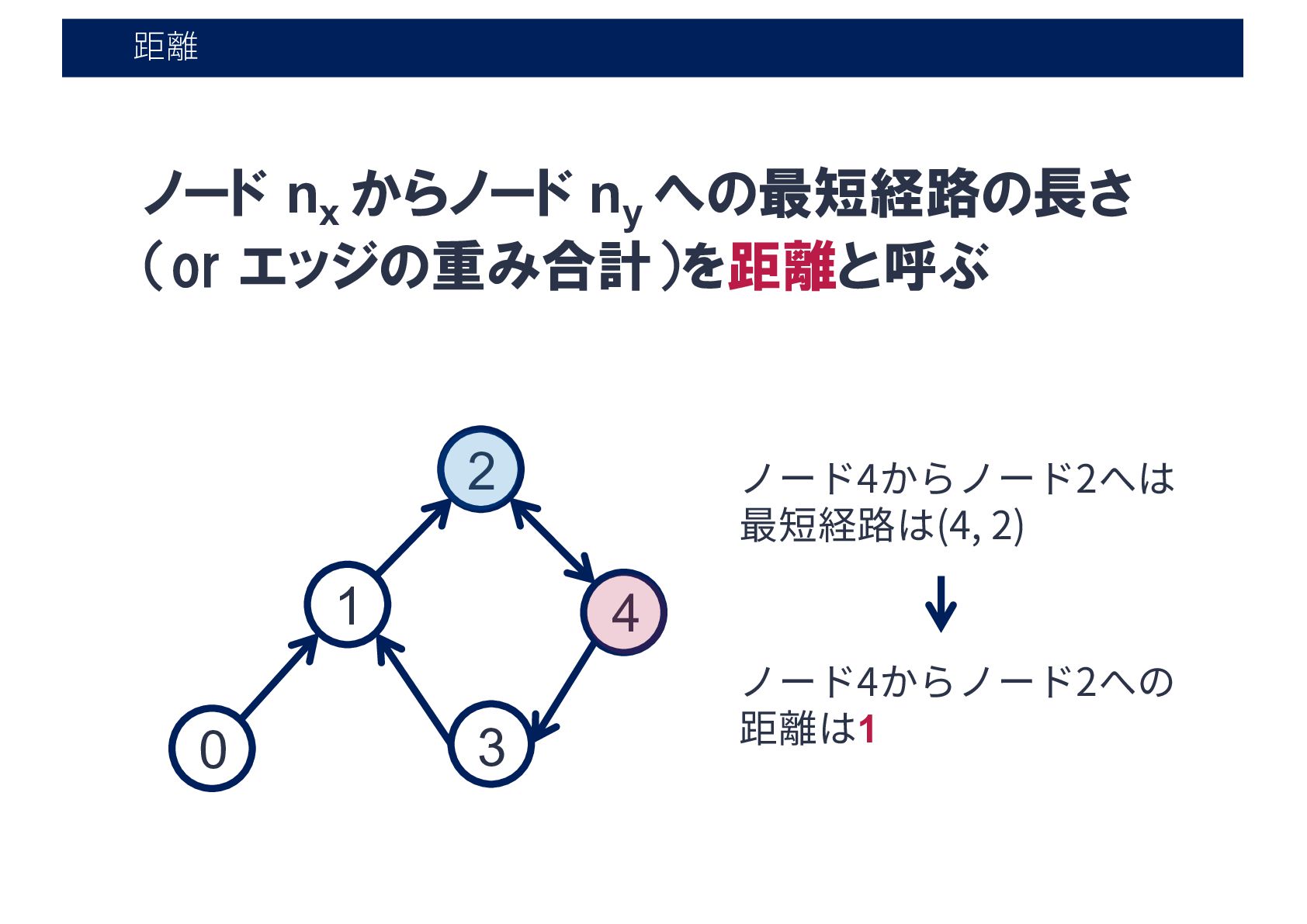
距離 ノード nx からノード ny への最短経路の長さ (or エッジの重み合計)を距離と呼ぶ 2 4
3 1 0 ノード4からノード2へは 最短経路は(4, 2) ノード4からノード2への 距離は1
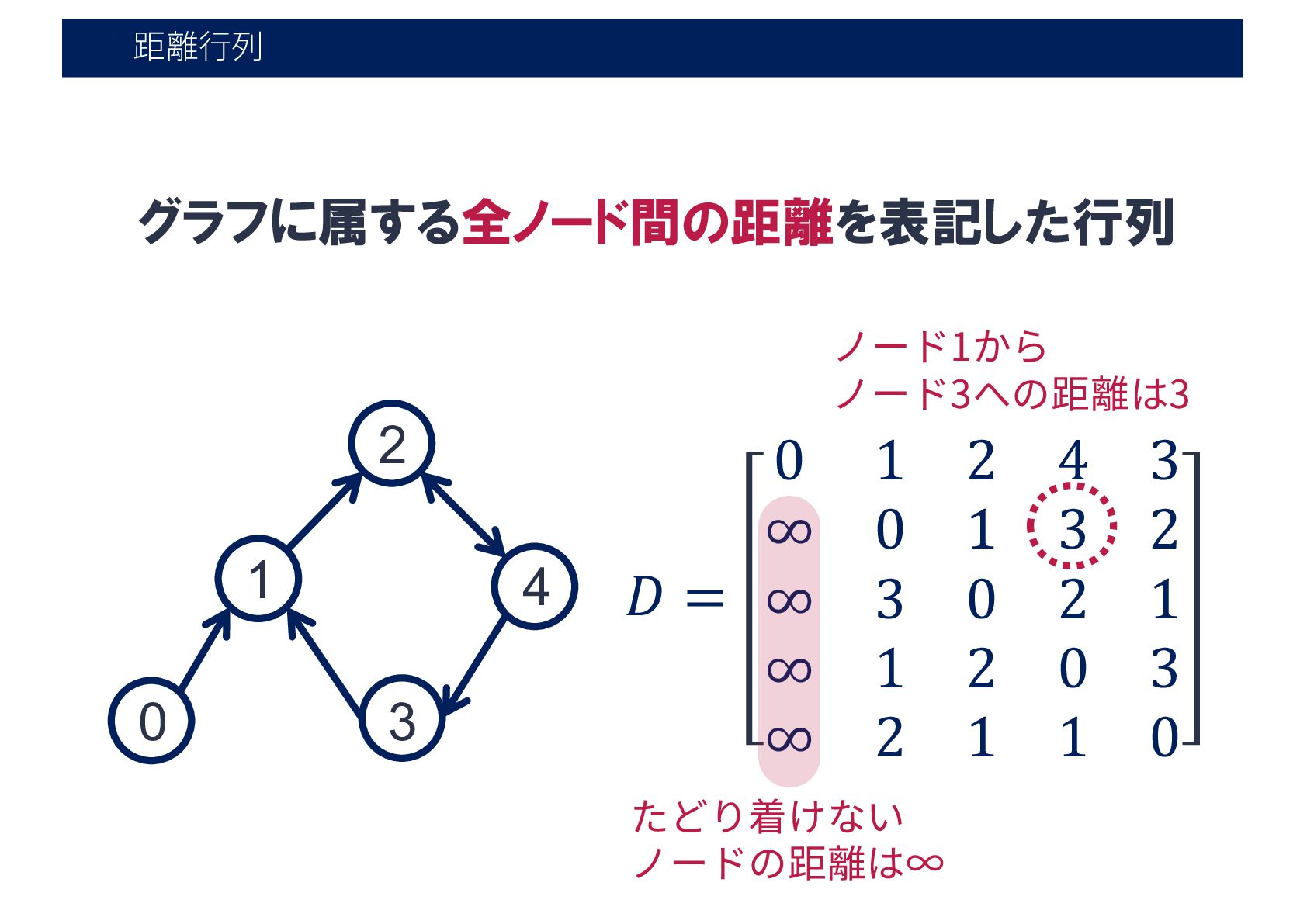
距離⾏列 グラフに属する全ノード間の距離を表記した行列 2 4 3 1 0 𝐷 = 0
1 2 4 3 ∞ 0 1 3 2 ∞ 3 0 2 1 ∞ 1 2 0 3 ∞ 2 1 1 0 たどり着けない ノードの距離は∞ ノード1から ノード3への距離は3
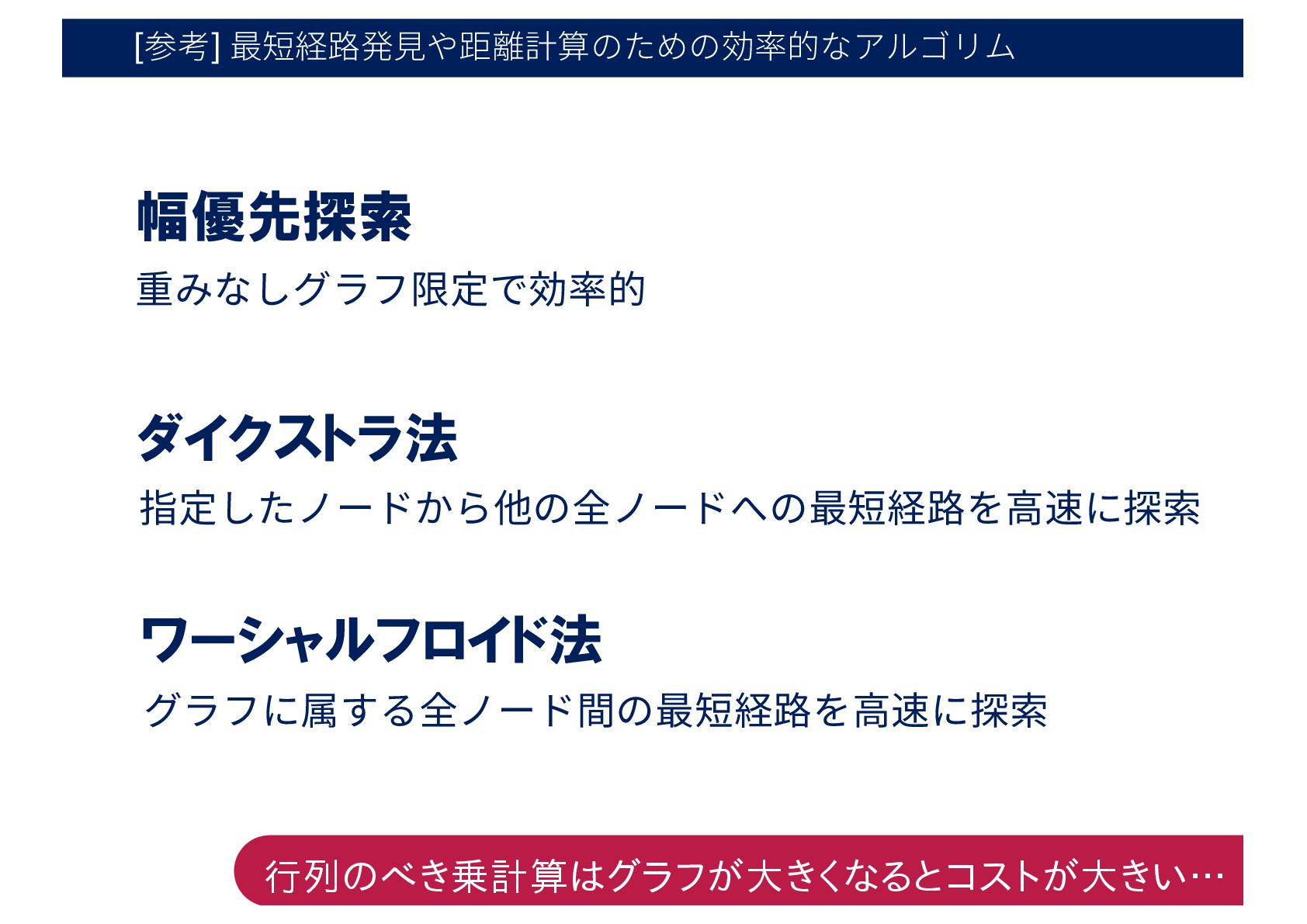
[参考] 最短経路発⾒や距離計算のための効率的なアルゴリム 幅優先探索 重みなしグラフ限定で効率的 ダイクストラ法 指定したノードから他の全ノードへの最短経路を⾼速に探索 ワーシャルフロイド法 グラフに属する全ノード間の最短経路を⾼速に探索 グラフが大きくなると行列のべき乗計算はコストが大きい…
最短経路アルゴリズム on NetworkX shortest_paths = dict( nx.single_source_all_shortest_paths(G, 3) ) all_shortest_paths
= dict( nx.all_pairs_shortest_paths(G) ) D = nx.floyd_warshall_numpy(G) # ワーシャルフロイド法で距離⾏列を計算 # ダイクストラ法で全ノード間の最短経路を取得 # ダイクストラ法でノード3から他ノードへの最短経路を取得
Hands-on タイム 以下のURLにアクセスして, 第9回のクイズQ3を解いてみよう https://graphnote.hontolab.org/ 50
回 トピック 9 グラフデータ 10 グラフ構造の諸指標 11 ノードの中心性 12 コミュニティ発見
13 ウェブとグラフ 14 グラフ埋め込み 15 総合演習 – 社会ネットワーク分析 授業計画 51
![グラフデータ ⼭本 祐輔 名古屋市⽴⼤学 データサイエンス研究科 [email protected] 第9回 データマイニング (グラフ分析入門) ⼭本祐輔](https://files.speakerdeck.com/presentations/5312450309ff43369d7502123781c5c1/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[参考] 最短経路発⾒や距離計算のための効率的なアルゴリム 幅優先探索 重みなしグラフ限定で効率的 ダイクストラ法 指定したノードから他の全ノードへの最短経路を⾼速に探索 ワーシャルフロイド法 グラフに属する全ノード間の最短経路を⾼速に探索 グラフが大きくなると行列のべき乗計算はコストが大きい…](https://files.speakerdeck.com/presentations/5312450309ff43369d7502123781c5c1/slide_47.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}