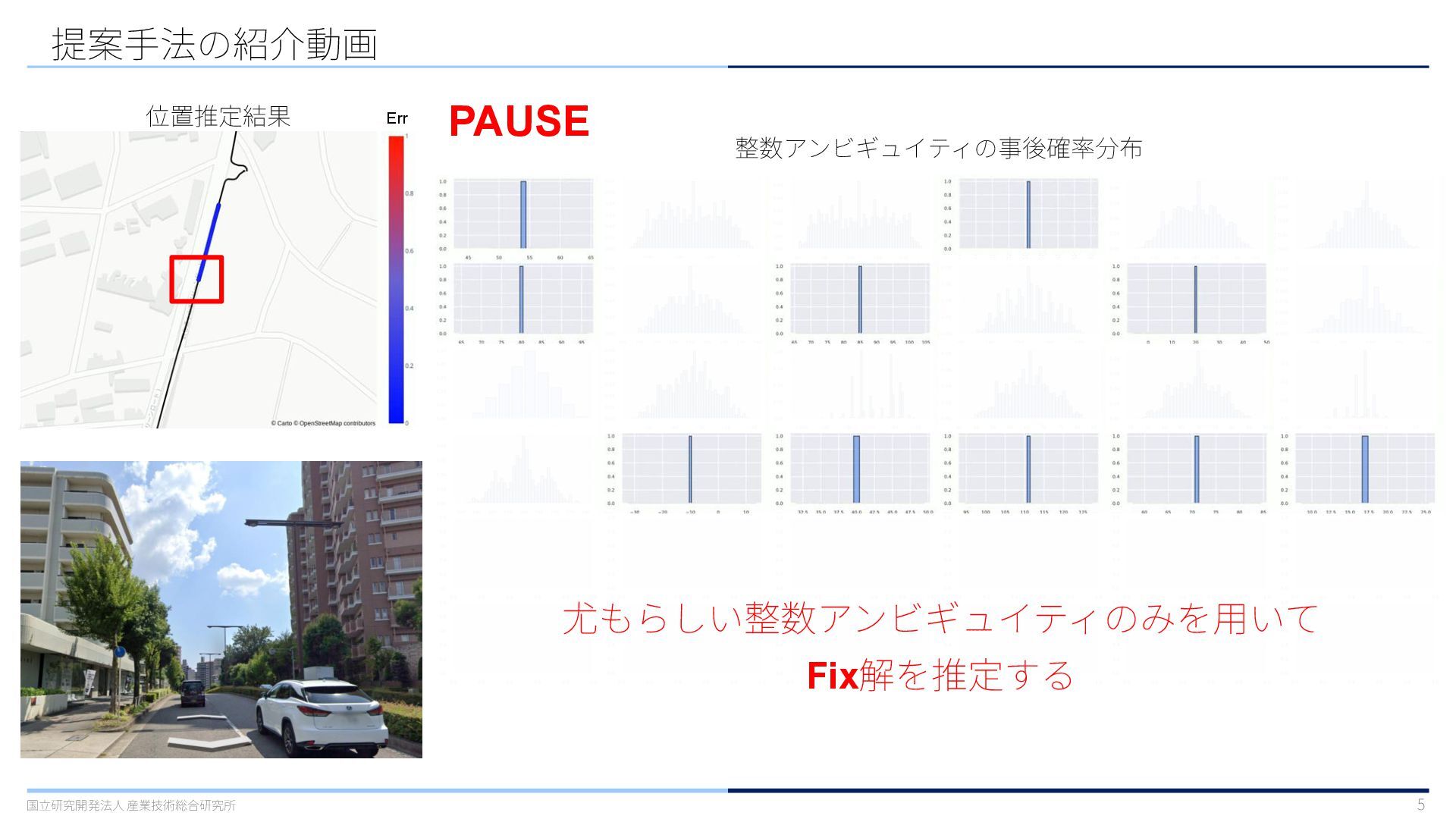
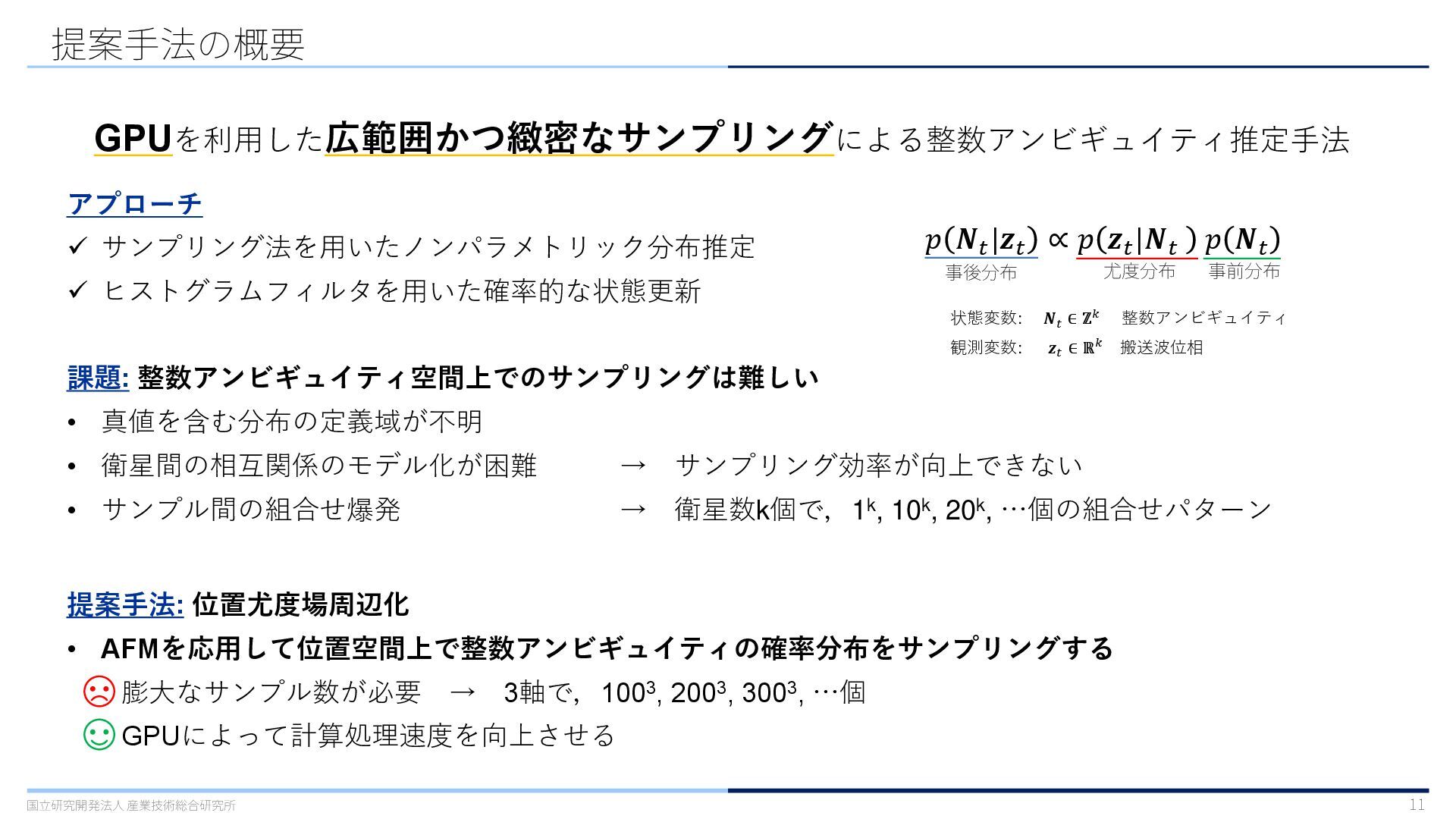
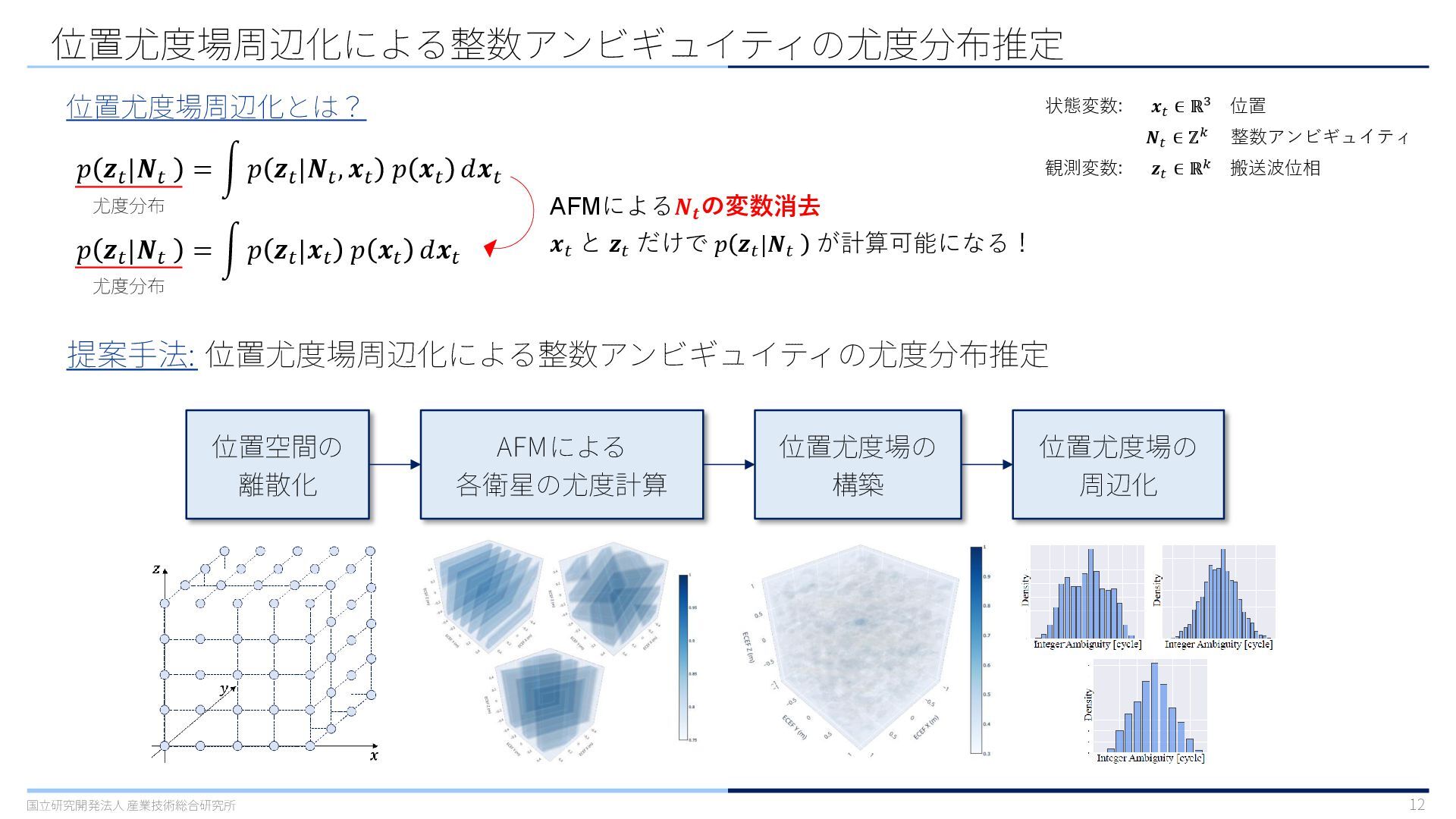
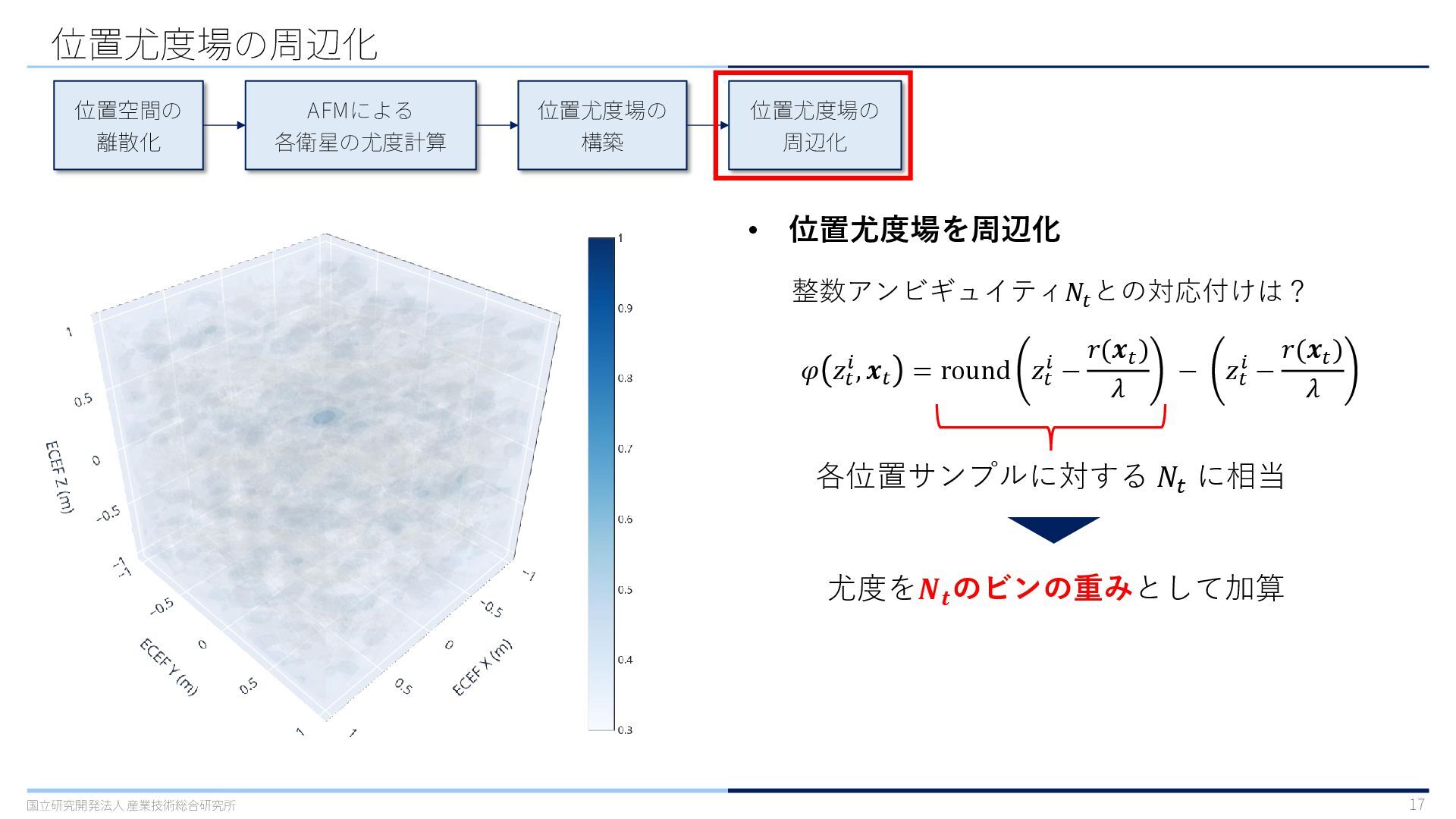
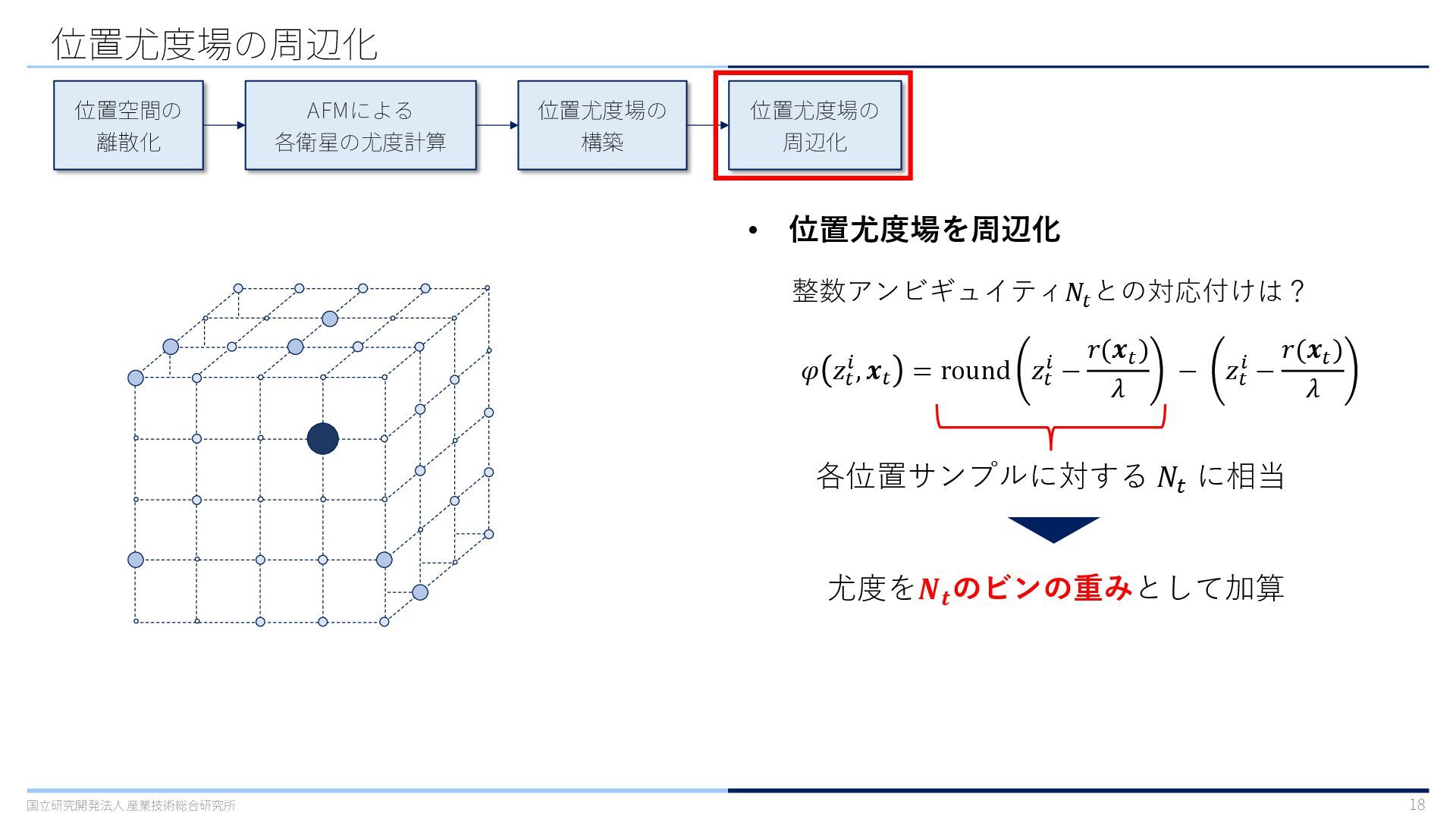
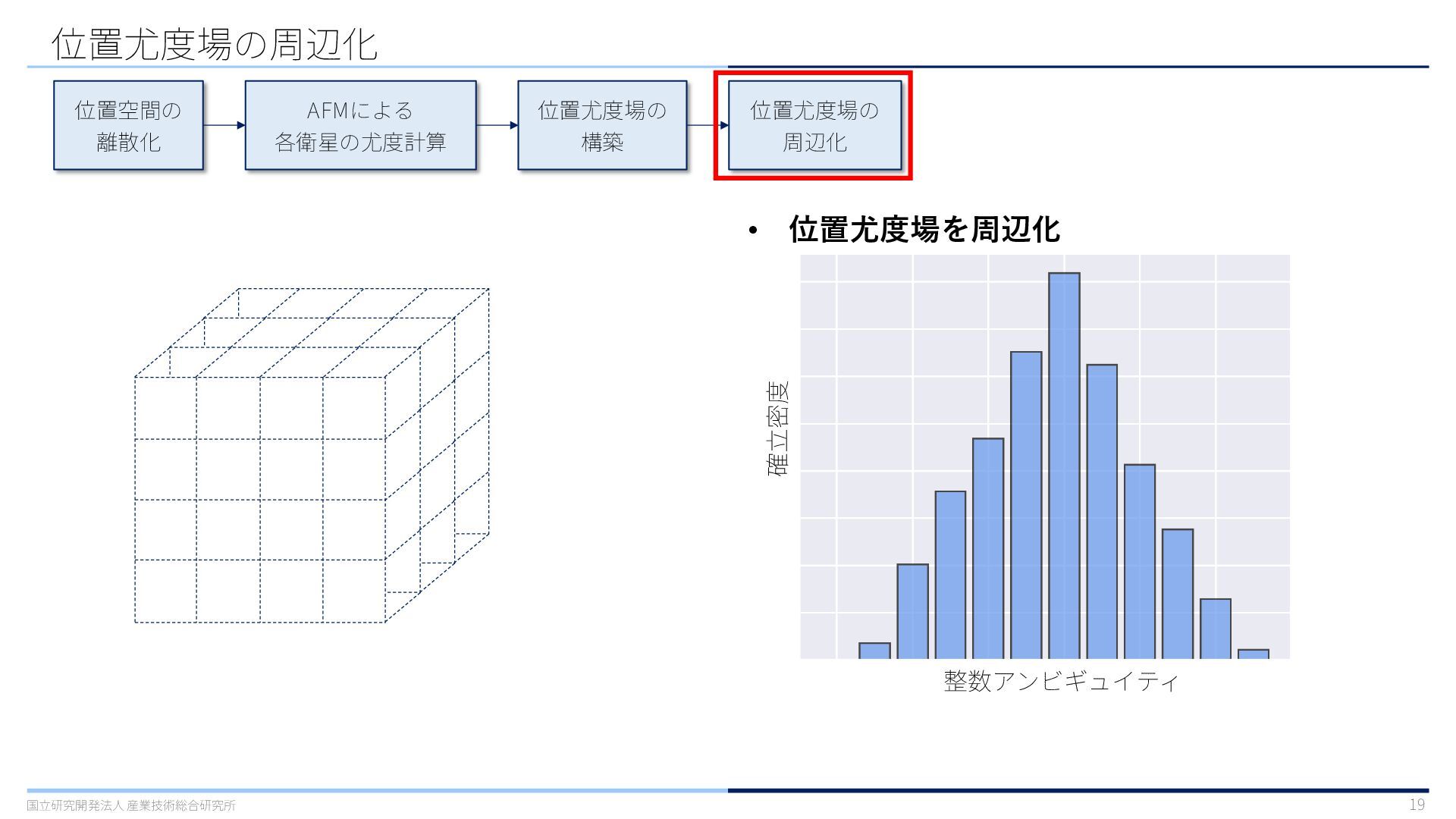
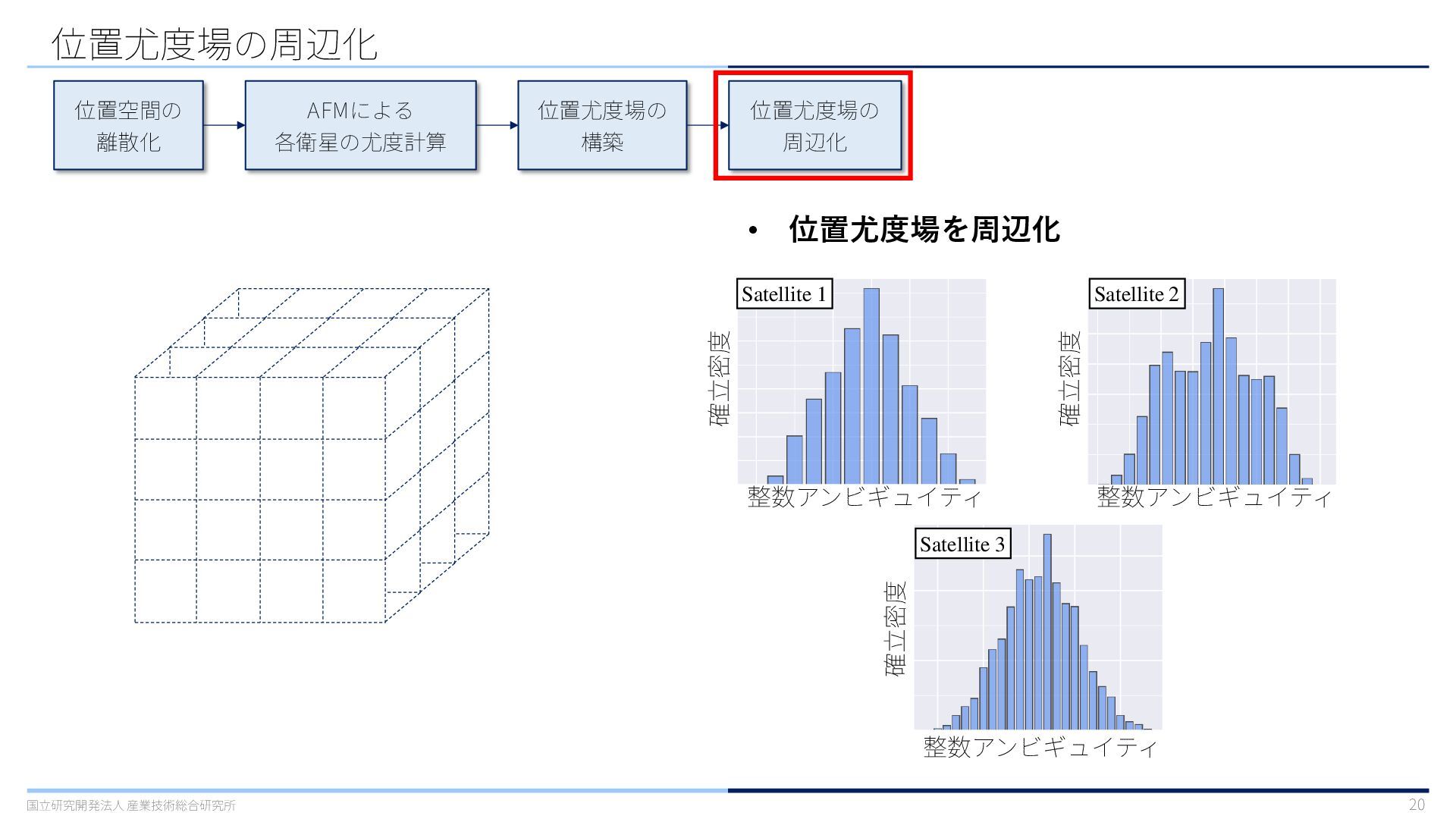
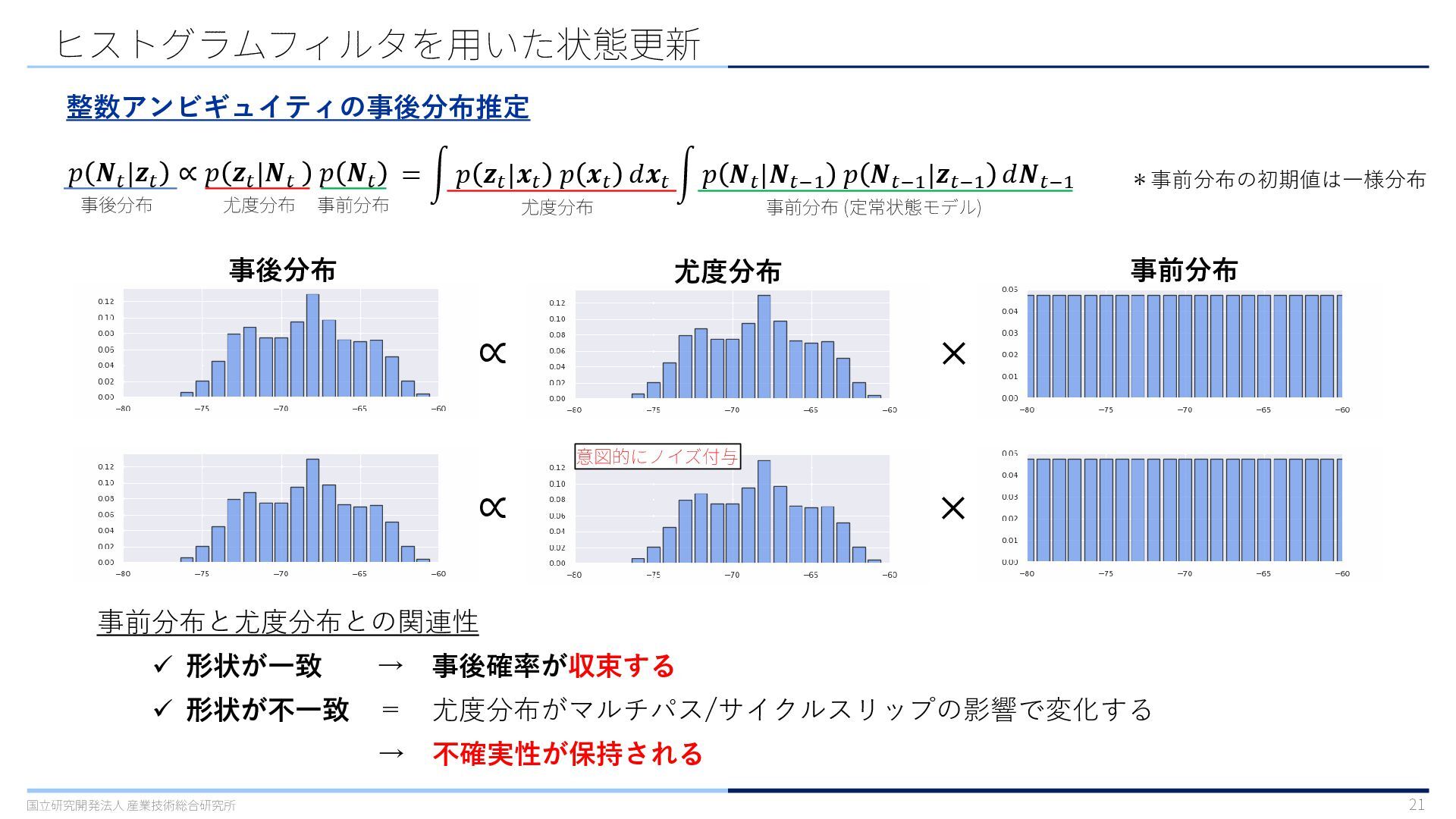
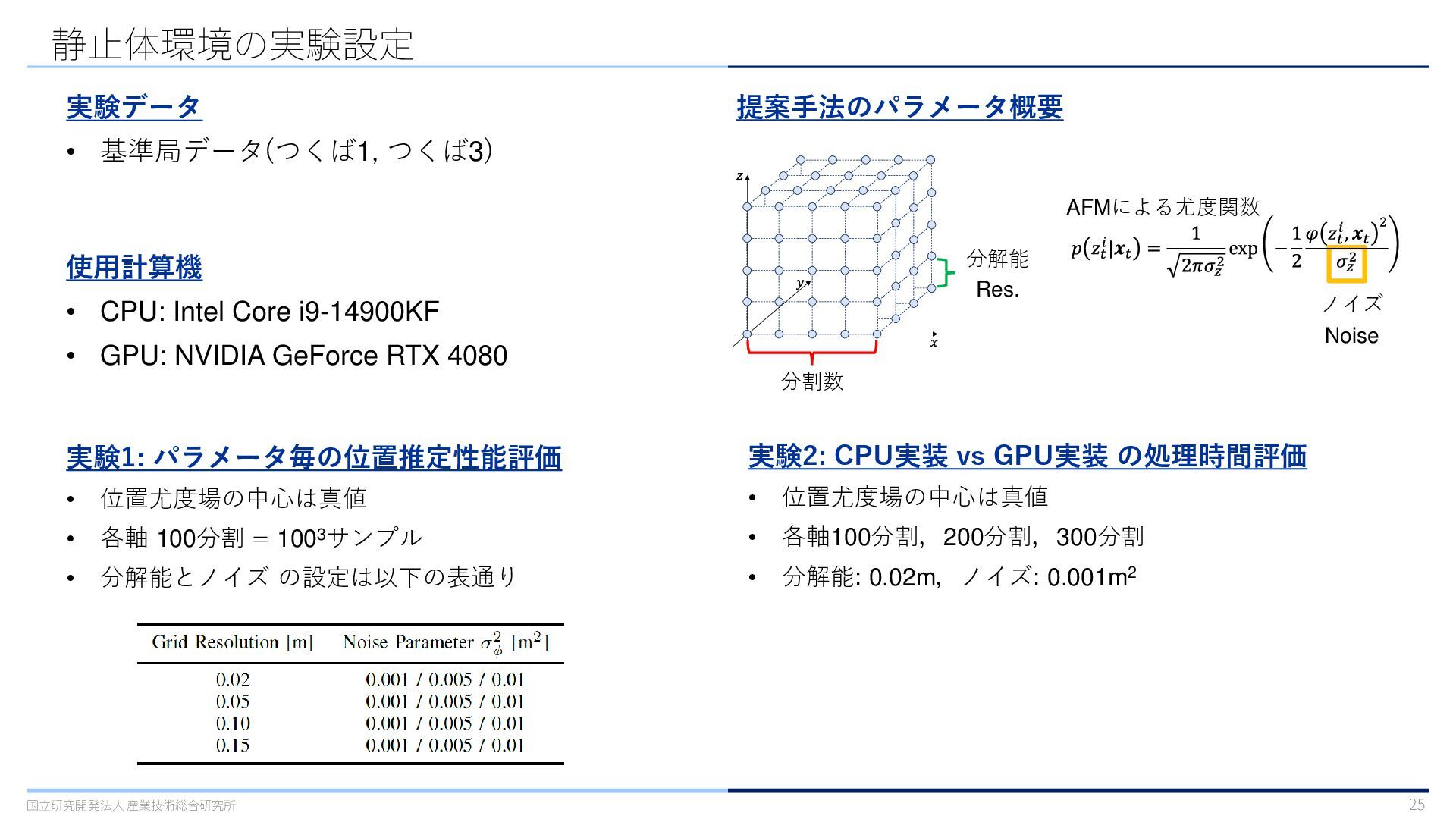
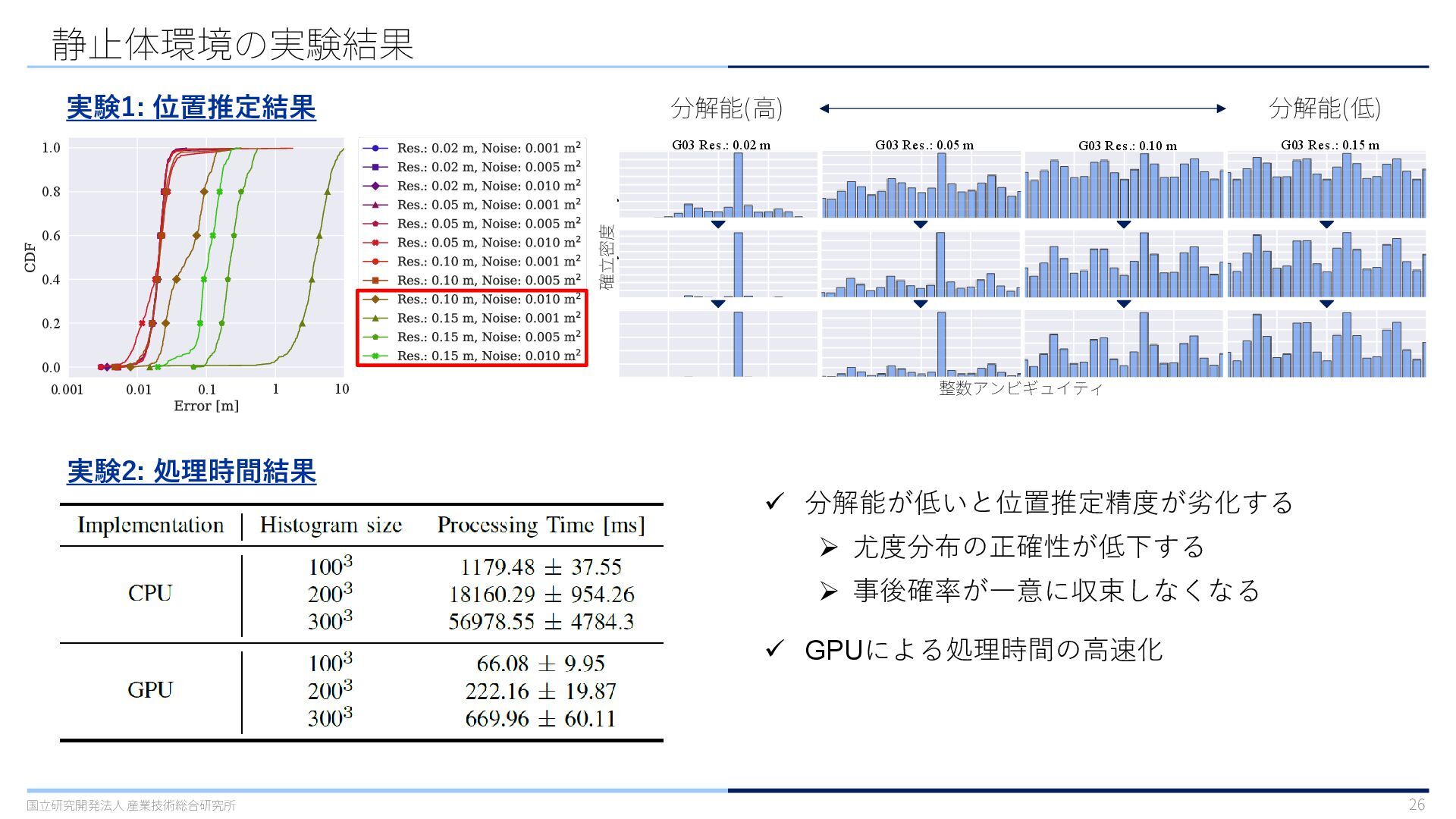
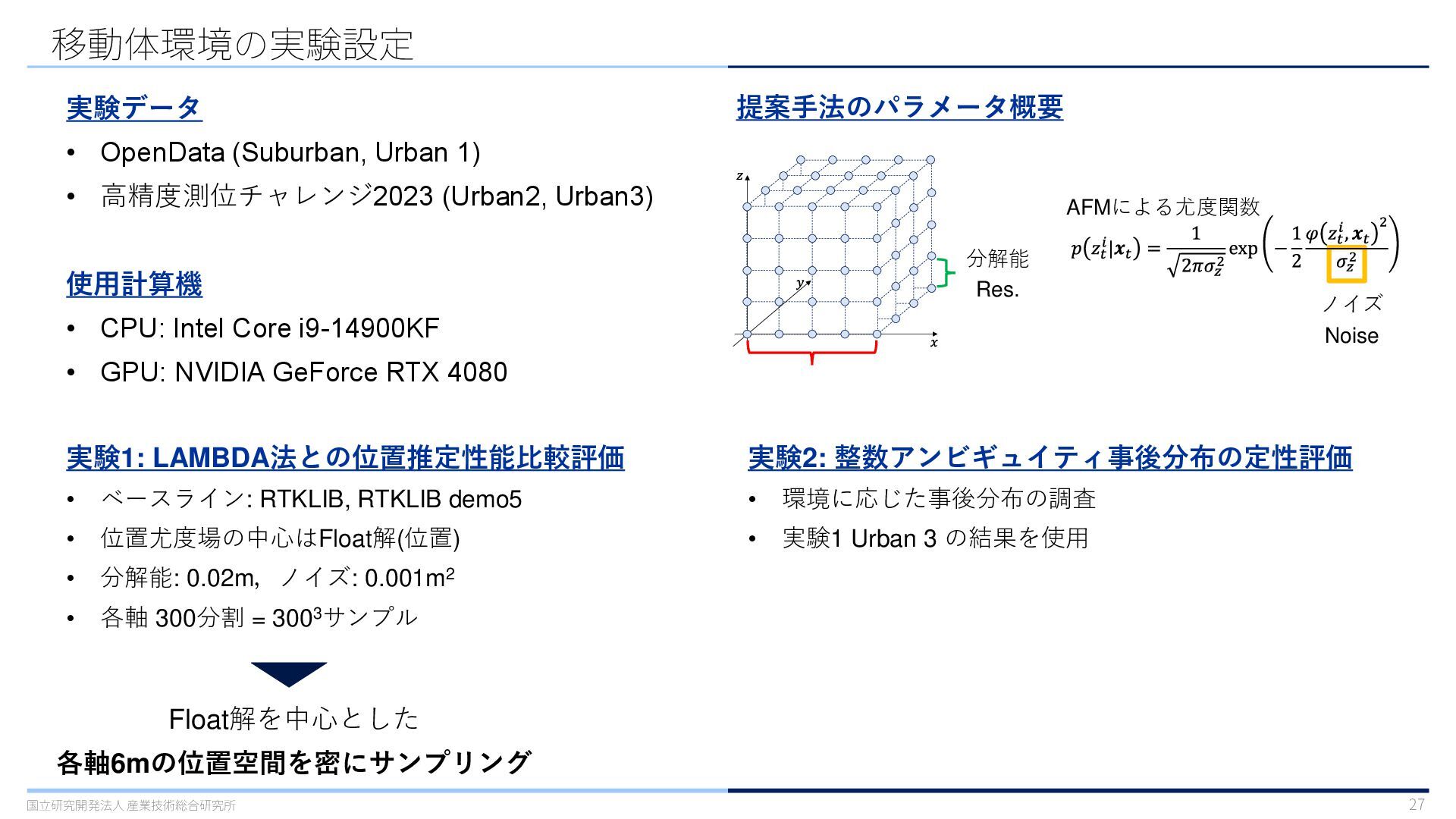
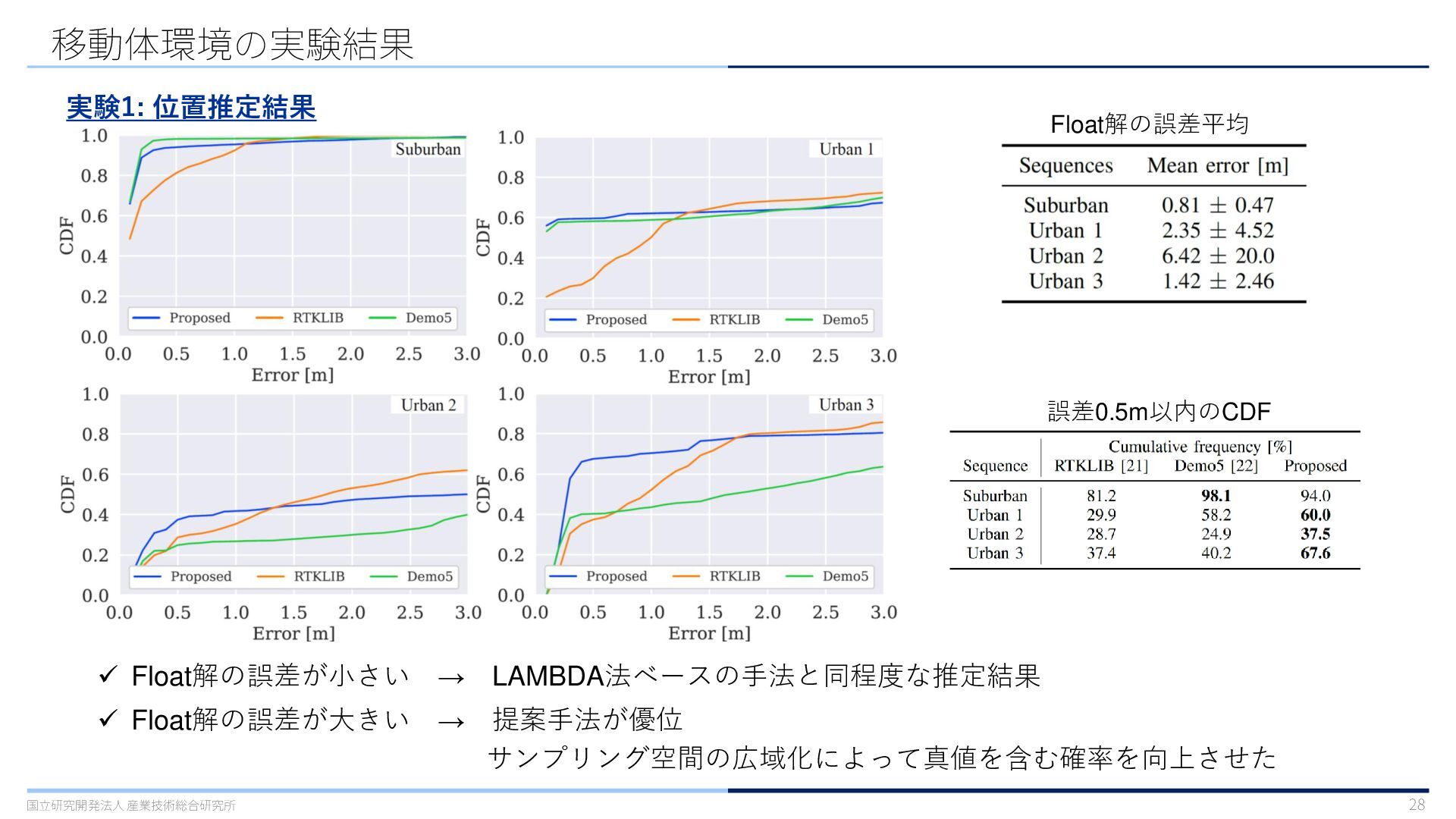
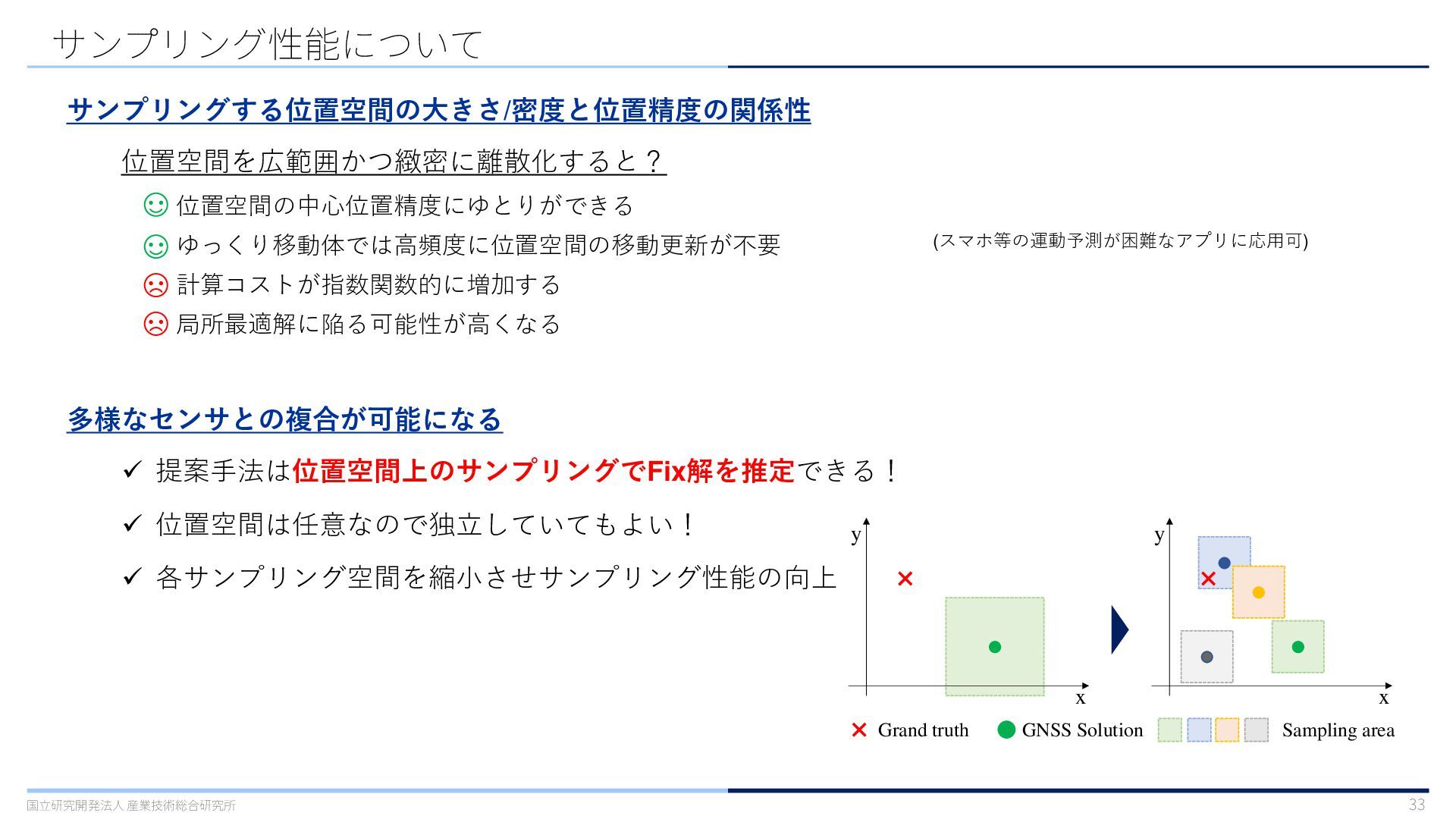
課題: 整数アンビギュイティ空間上でのサンプリングは難しい • 真値を含む分布の定義域が不明 • 衛星間の相互関係のモデル化が困難 → サンプリング効率が向上できない • サンプル間の組合せ爆発 → 衛星数k個で,1k, 10k, 20k, …個の組合せパターン 提案手法: 位置尤度場周辺化 • AFMを応用して位置空間上で整数アンビギュイティの確率分布をサンプリングする 膨大なサンプル数が必要 → 3軸で,1003, 2003, 3003, …個 GPUによって計算処理速度を向上させる 𝑝 𝑵𝑡 |𝒛𝑡 ∝ 𝑝 𝒛𝑡 |𝑵𝑡 𝑝 𝑵𝑡 事後分布 尤度分布 事前分布 状態変数: 𝑵𝑡 ∈ ℤ𝑘 整数アンビギュイティ 観測変数: 𝒛𝑡 ∈ ℝ𝑘 搬送波位相
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}