Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適AIロボット開発
Search
Masaya Kataoka
December 27, 2024
Technology
3.1k
2
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適AIロボット開発
Masaya Kataoka
December 27, 2024
More Decks by Masaya Kataoka
See All by Masaya Kataoka
CLIPでrosbagの データを検索してみる話
hakuturu583
0
230
AMBER、rosbag と pytorchで はじめるお手軽マルチ モーダルロボット開発
hakuturu583
0
340
Other Decks in Technology
See All in Technology
AI研修(Day1)【MIXI 26新卒技術研修】
mixi_engineers
PRO
1
1.3k
設計レビューとAIハーネスで向き合う AIが生み出した新しいボトルネックの対処法 / Design Reviews and AI Harnesses Against New Bottlenecks Created by AI
nstock
6
510
CloudWatchから始めるAWS監視
butadora
0
190
AI時代こそ、スケールしないことをしよう -「作る人」から「なぜ作るか」を考える人へ / Do Things That Don't Scale in the AI Era — From How to Why
kaminashi
1
160
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
クラウドを使う側から、作る側へ / 大吉祥寺.pm 2026前夜祭
fujiwara3
7
1.5k
AI_Dev_Day_製造業領域でのAI活用から見た活用の罠と成功に導く実践知.pdf
kintotechdev
0
230
「待ち時間」の消滅と「自我消耗」の加速:生成AI時代のエンジニアを救うメンタル・リソース管理
poropinai1966
0
200
エンタープライズデータへ安全につなぐ Production-ready なエージェント設計 ― AI × MCP リファレンスアーキテクチャ ― #AIDevDay
cdataj
1
110
AI時代におけるテストの基礎の再定義 / Rethinking the Fundamentals of Testing in the AI Era
mineo_matsuya
15
5.7k
データエンジニアリングとドメイン駆動設計
masuda220
PRO
15
2.7k
セキュリティ研修【MIXI 26新卒技術研修】
mixi_engineers
PRO
10
9.8k
Featured
See All Featured
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
220
Build your cross-platform service in a week with App Engine
jlugia
234
18k
[Rails World 2023 - Day 1 Closing Keynote] - The Magic of Rails
eileencodes
38
2.9k
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
390
Ruling the World: When Life Gets Gamed
codingconduct
0
290
YesSQL, Process and Tooling at Scale
rocio
174
15k
A Guide to Academic Writing Using Generative AI - A Workshop
ks91
PRO
1
360
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
Raft: Consensus for Rubyists
vanstee
141
7.6k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.6k
Designing for Performance
lara
611
70k
Transcript
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適 AIロボット開発 Team re-boot Masaya Kataoka
人生是即RoboCup • 学生時代は阪大のJoitech-SPLというチームのリーダーをしていました • ラズパイ以下のCPUでヒューマノイドでサッカーをやるとかいう魔境 • フルスクラッチで自作、予選敗退したけど圧倒的満足 • いい加減ハード作らせろ...これでは2050年までに人間に勝てないぞ!! ▶というわけで会社に世界大会優勝者がいたのでRobocupチームを立ち上げました
最近機械学習大変隆盛 • MPC x 油圧で頑張っていたBoston Dynamicsも強化学習 x 電動に • 爆速ロボットCassieは以前からlearning
base
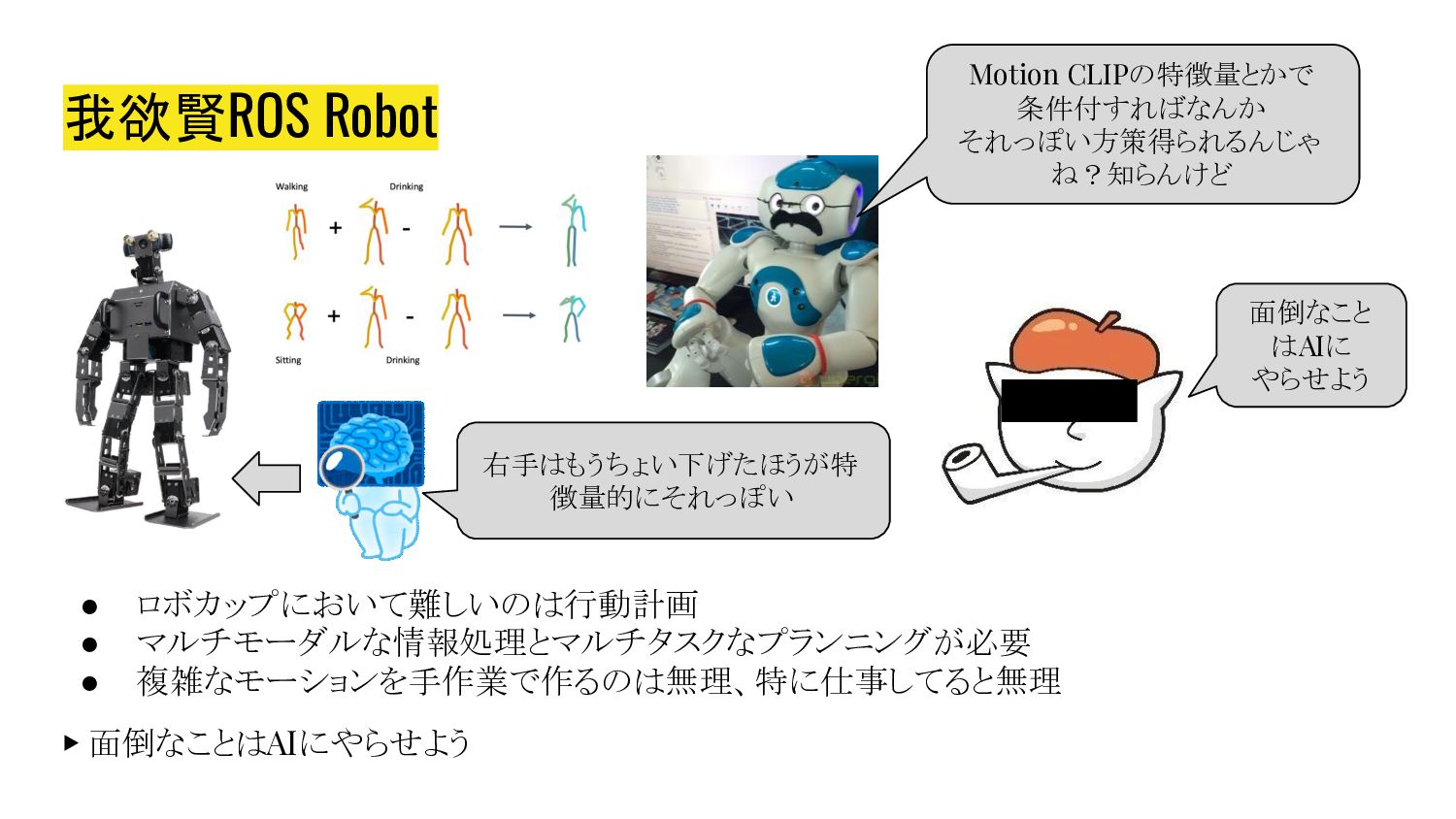
我欲賢ROS Robot • ロボカップにおいて難しいのは行動計画 • マルチモーダルな情報処理とマルチタスクなプランニングが必要 • 複雑なモーションを手作業で作るのは無理、特に仕事してると無理 ▶ 面倒なことはAIにやらせよう
面倒なこと はAIに やらせよう Motion CLIPの特徴量とかで 条件付すればなんか それっぽい方策得られるんじゃ ね?知らんけど 右手はもうちょい下げたほうが特 徴量的にそれっぽい
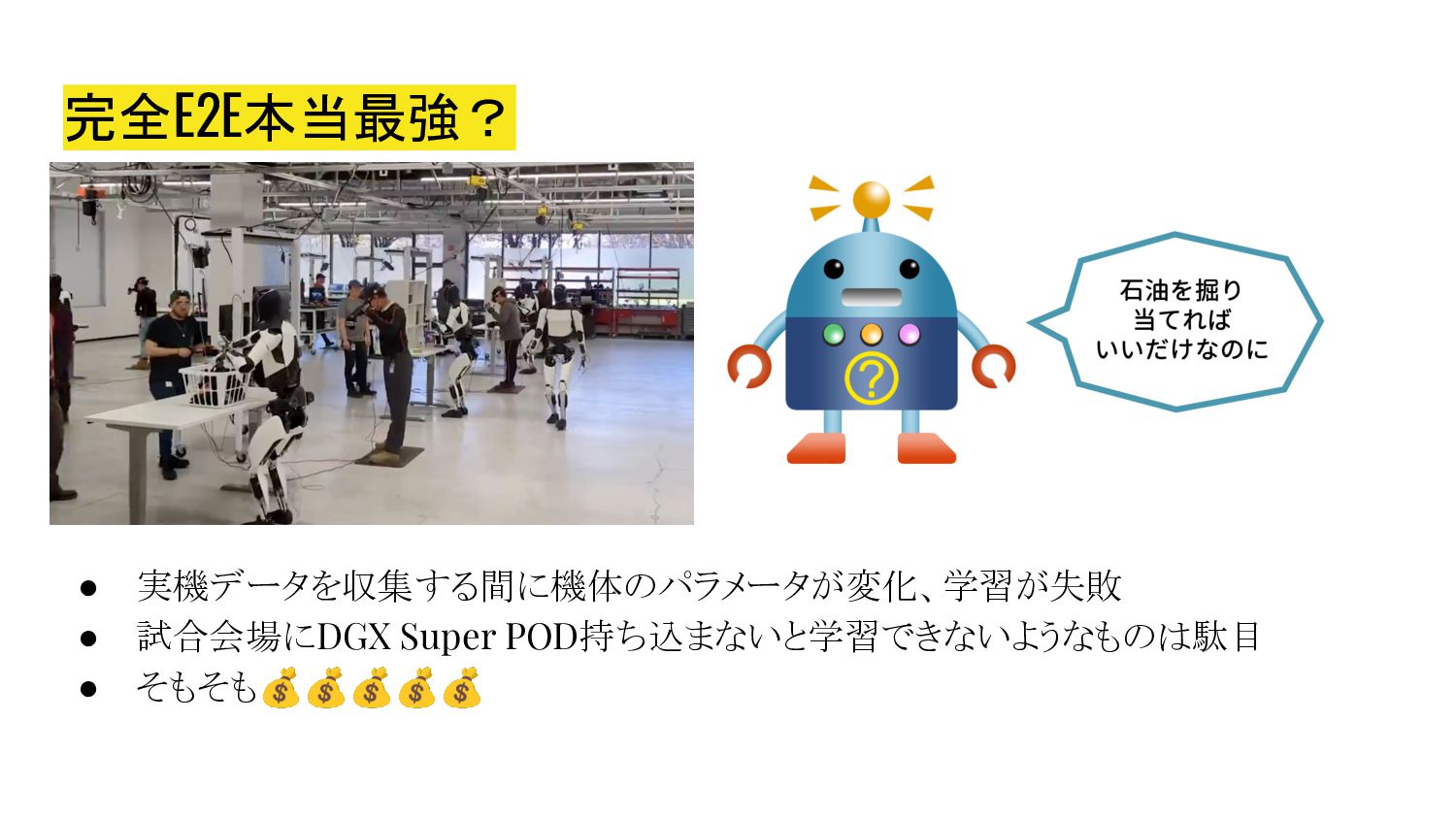
完全E2E本当最強? • 実機データを収集する間に機体のパラメータが変化、学習が失敗 • 試合会場にDGX Super POD持ち込まないと学習できないようなものは駄目 • そもそも💰💰💰💰💰
我欲混合構成 • learning baseな要素とそうでなくていい要素がある • ハードウェア駆動や前処理、同期、座標変換などを学習でやる意味がない • こういった決定的な要素に対してROSはとても強い • でも、学習時にはROSは通信遅延やネットワークの設定などで邪魔
▶ 適切に役割分担を行い最適なロボットシステムを実現 VLMで画像処理するにしても、 歪み補正までディープでやる意 味ないよ
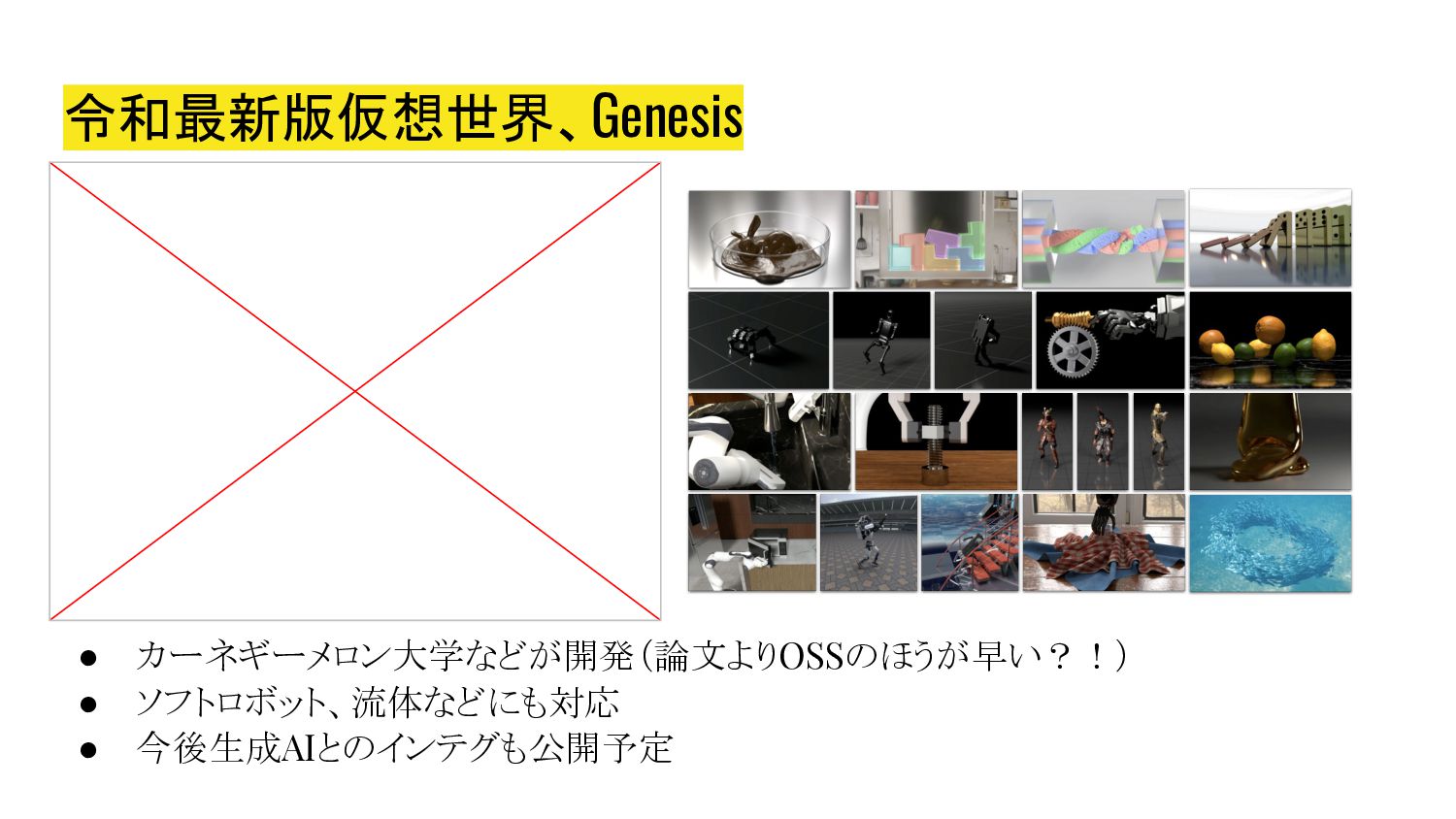
令和最新版仮想世界、Genesis • カーネギーメロン大学などが開発(論文よりOSSのほうが早い?!) • ソフトロボット、流体などにも対応 • 今後生成AIとのインテグも公開予定
genesis_ros • URDF変換、読み込み • リンクの位置情報を/tfトピックとしてmcapで出力 • amber連携によるpytorchへのmcapデータ入力 • セットアップはgit cloneしてpoetry
installするだけ!
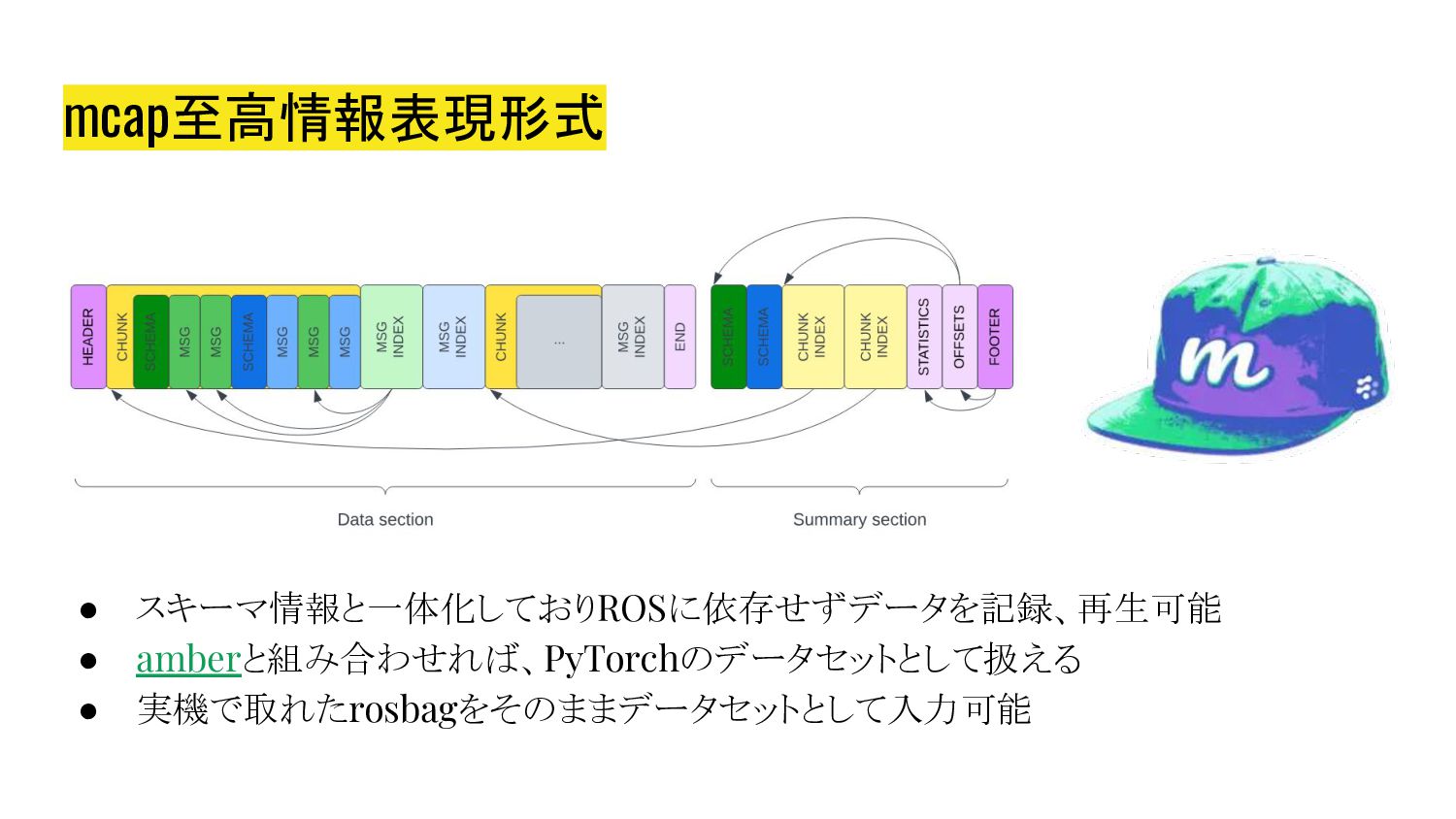
mcap至高情報表現形式 • スキーマ情報と一体化しておりROSに依存せずデータを記録、再生可能 • amberと組み合わせれば、PyTorchのデータセットとして扱える • 実機で取れたrosbagをそのままデータセットとして入力可能
論よりRUN
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}