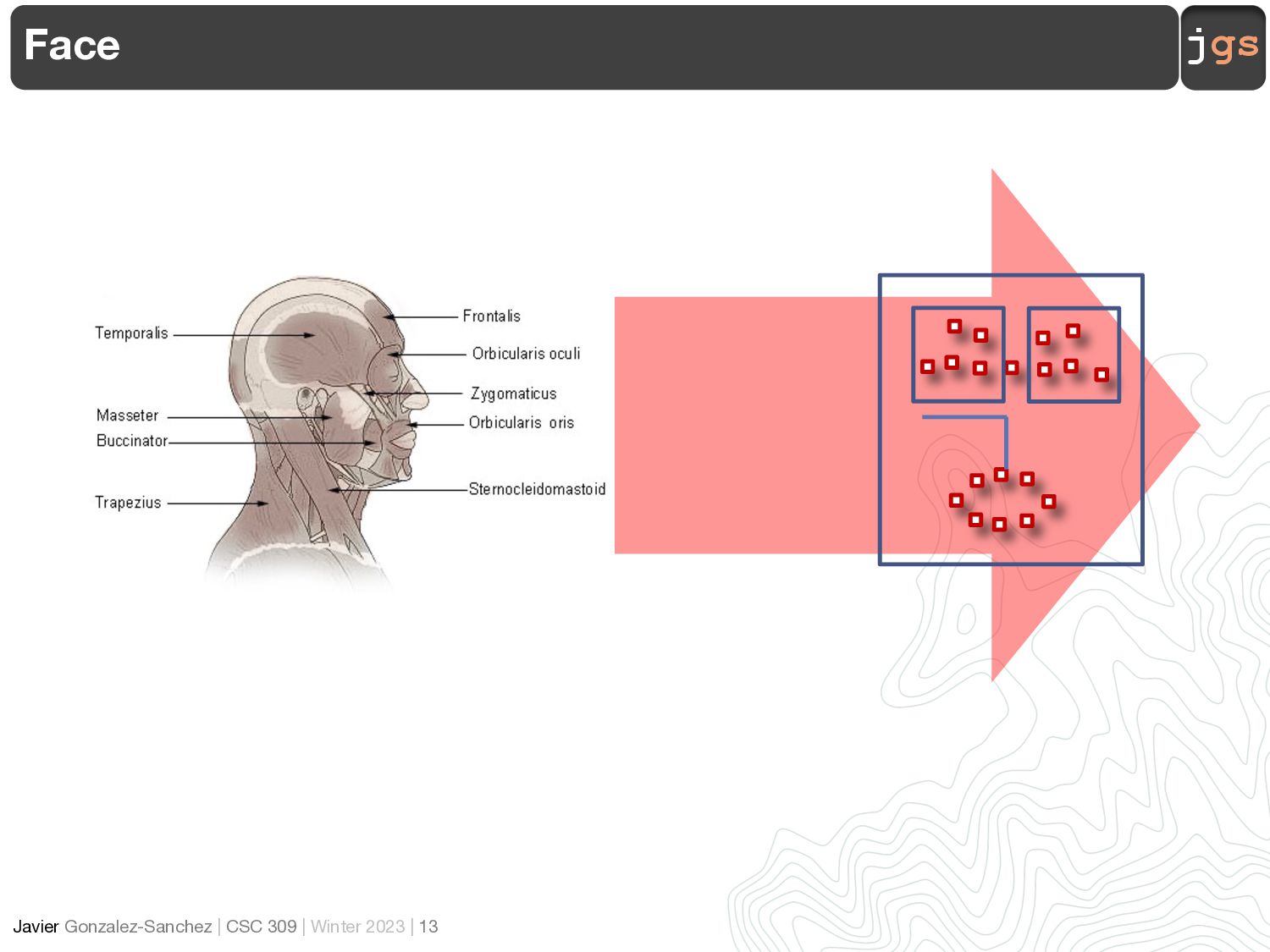
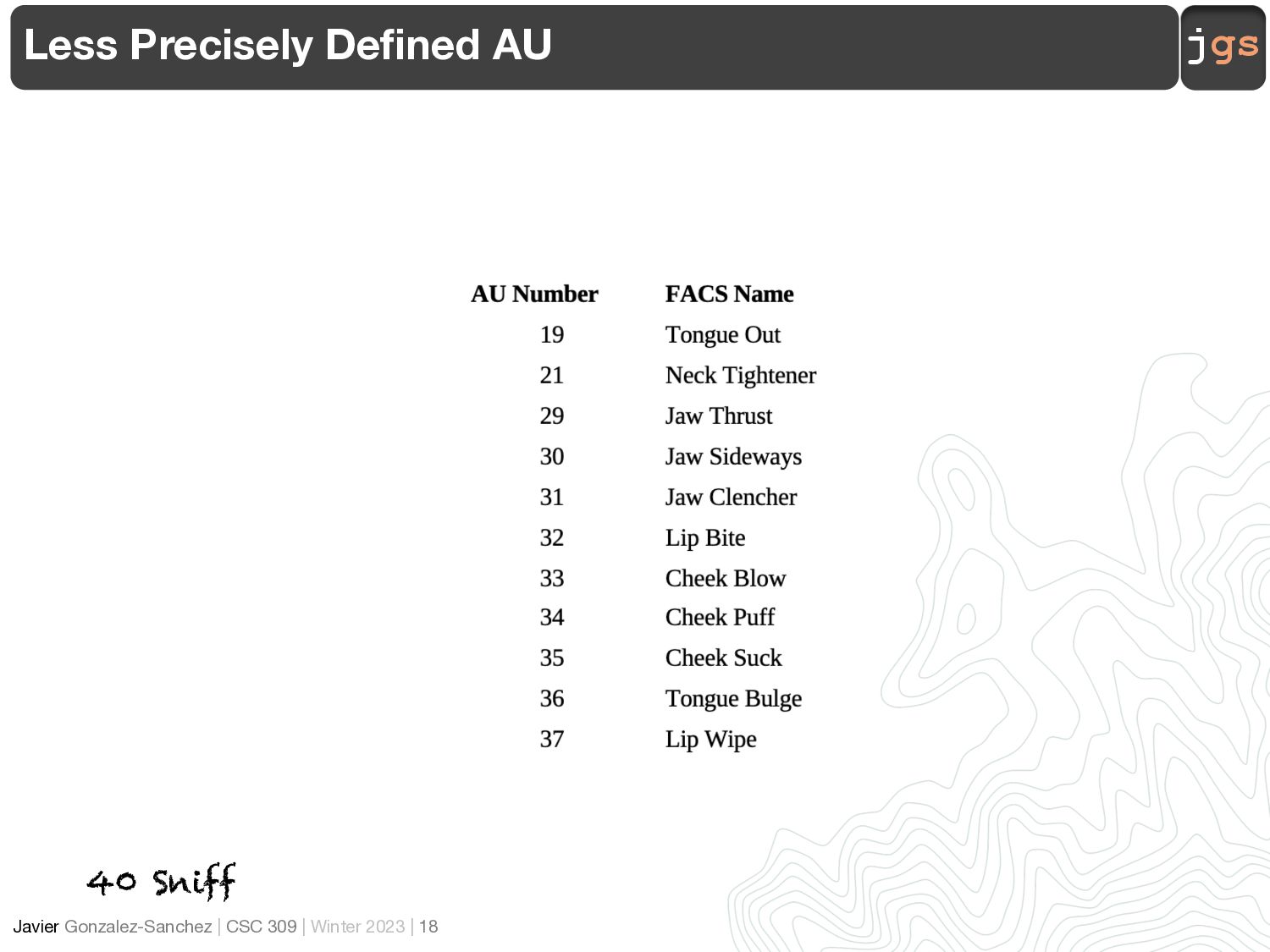
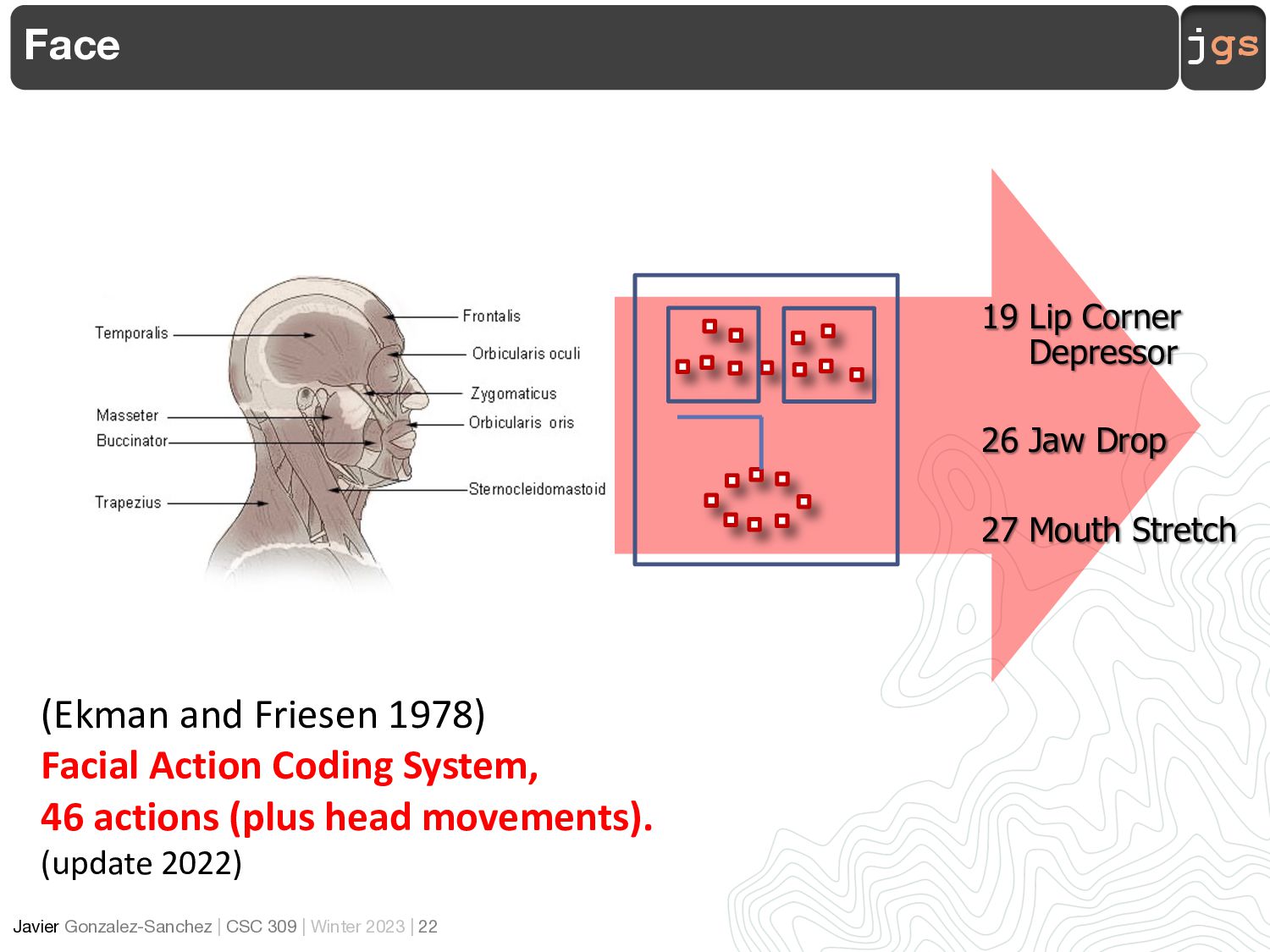
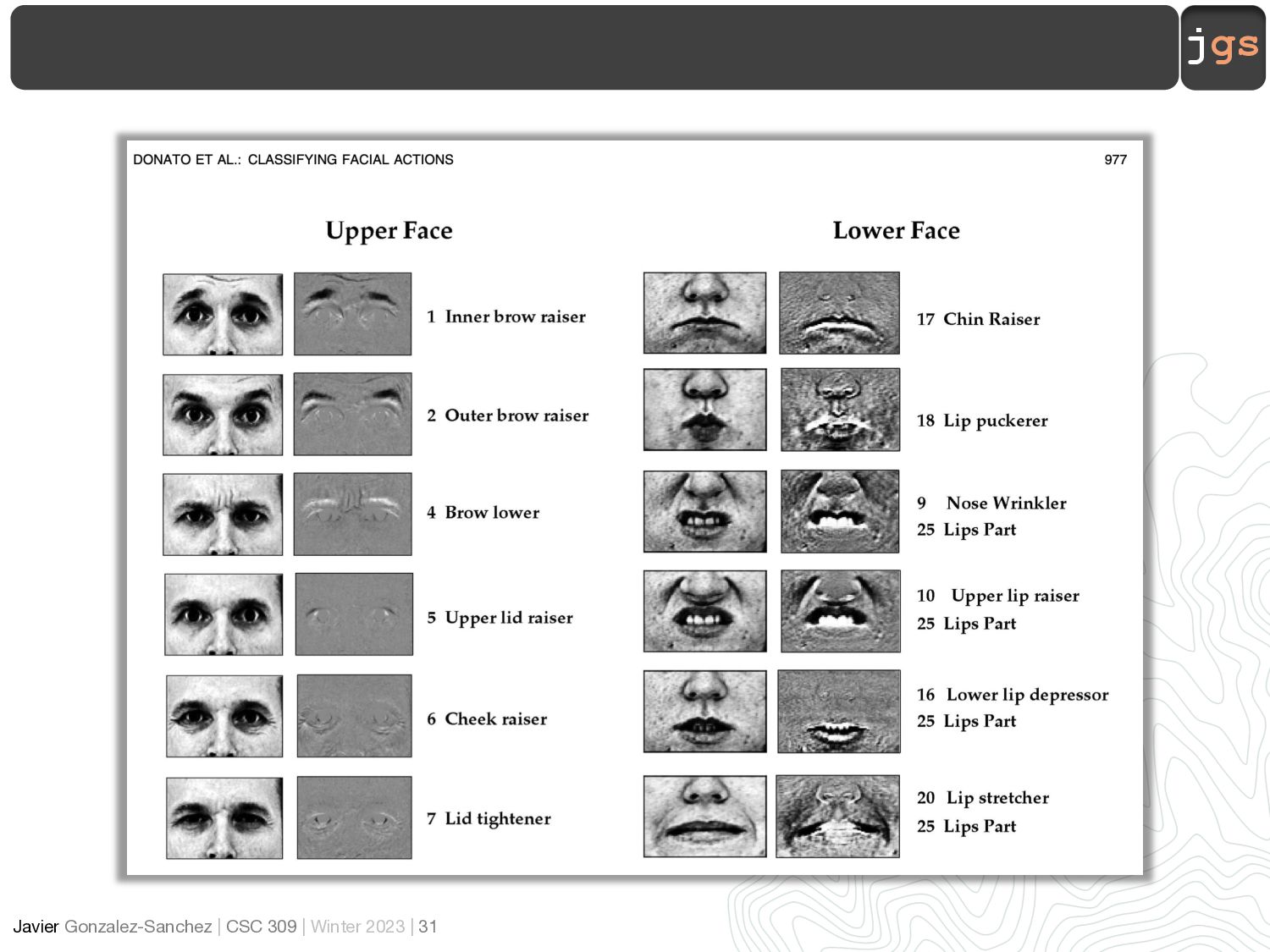
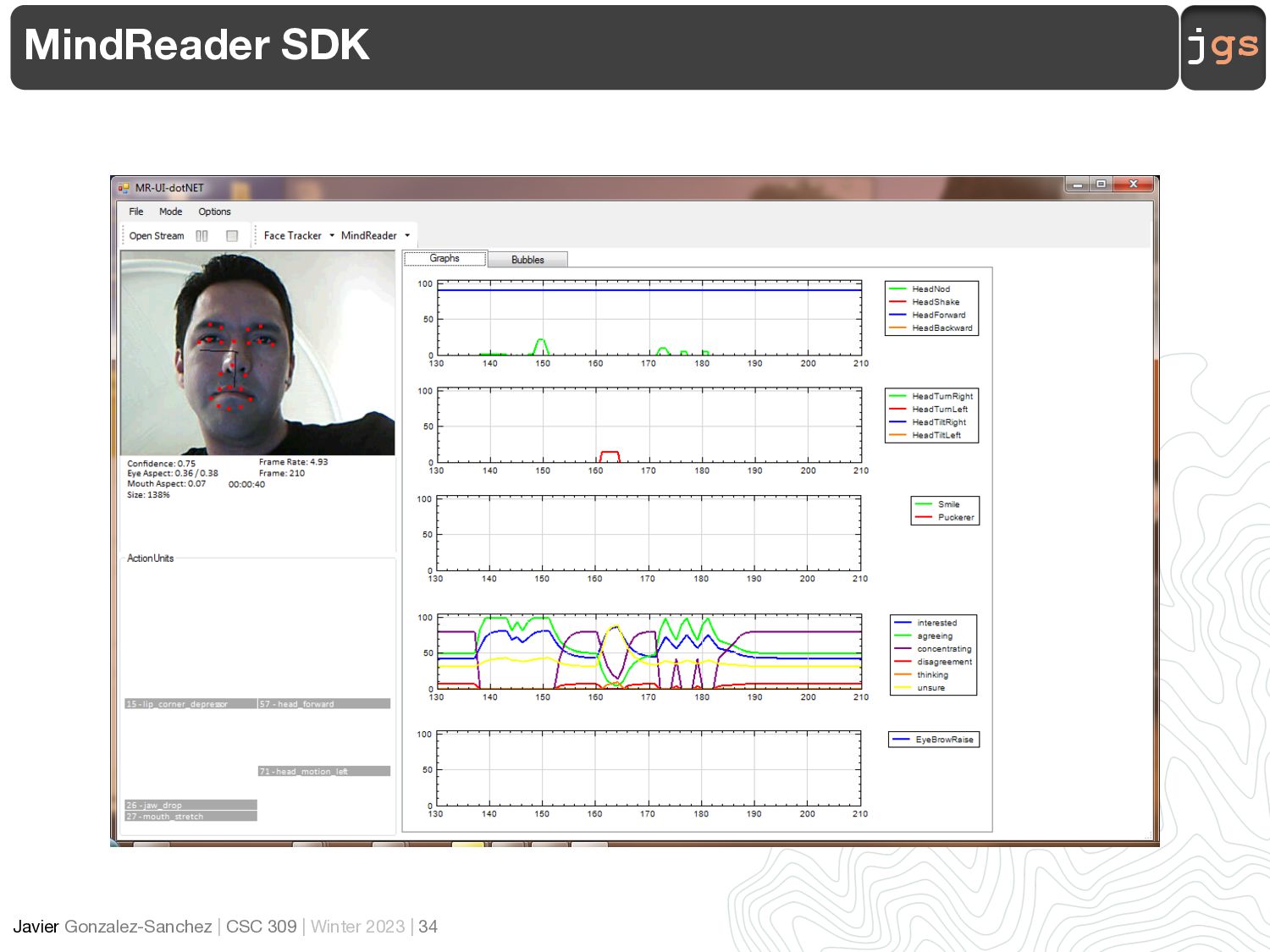
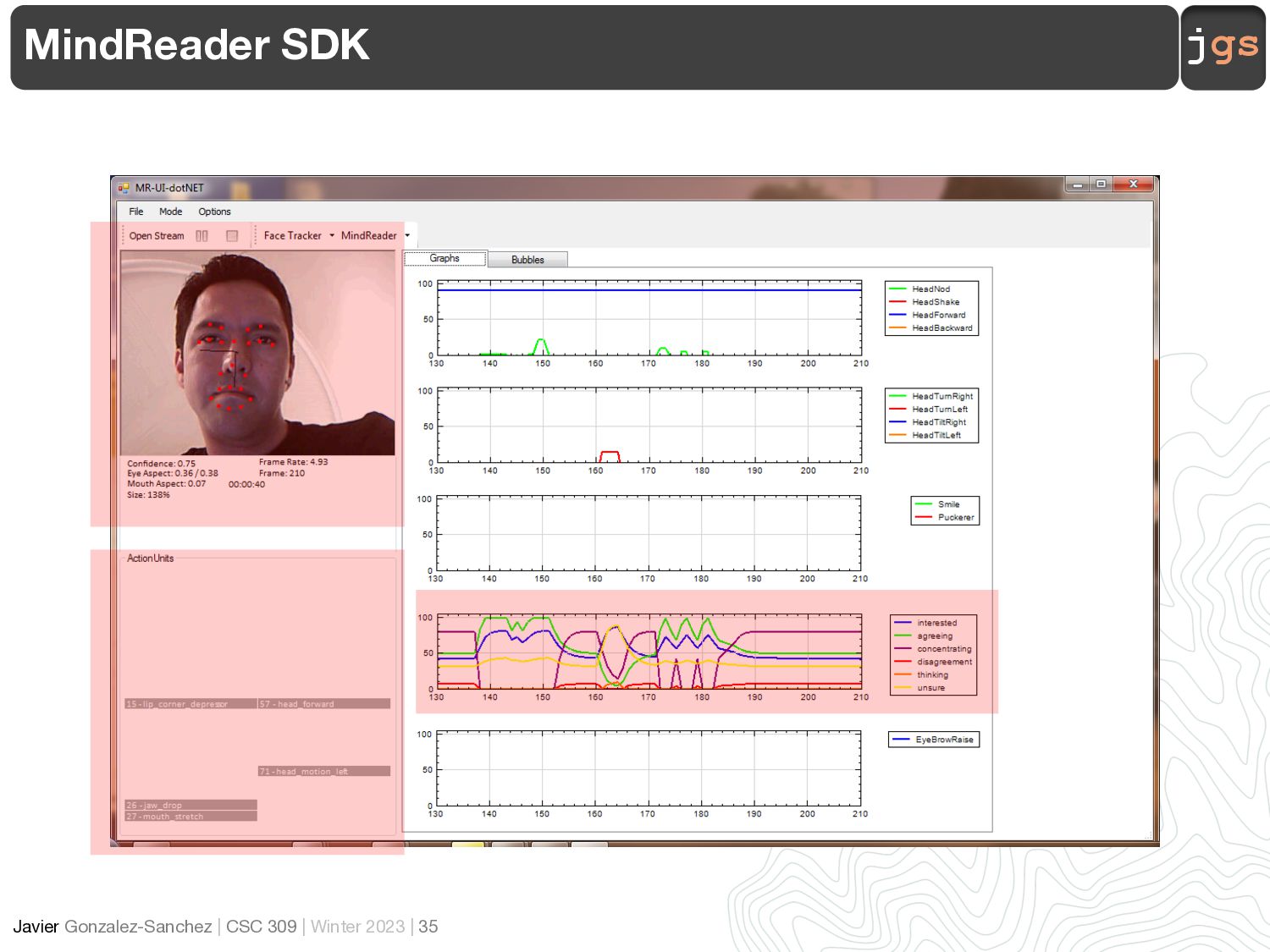
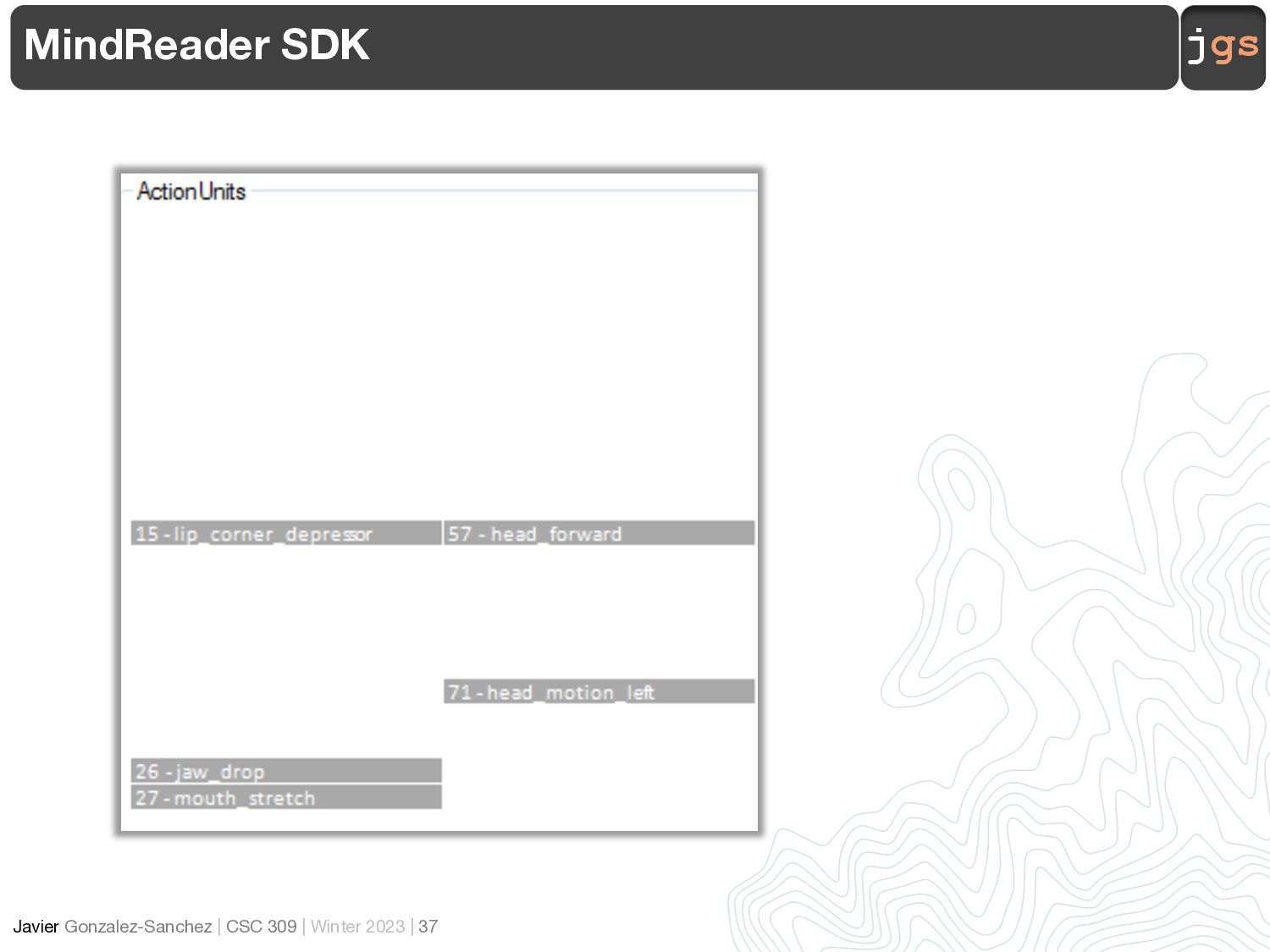
a ci a l expressions into individu a l muscle movements, c a lled " a ction units" th a t c a n be combined to cre a te a wide r a nge of f a ci a l expressions. Facial Ac ti on Coding System, 46 ac ti ons (plus head movements). 6
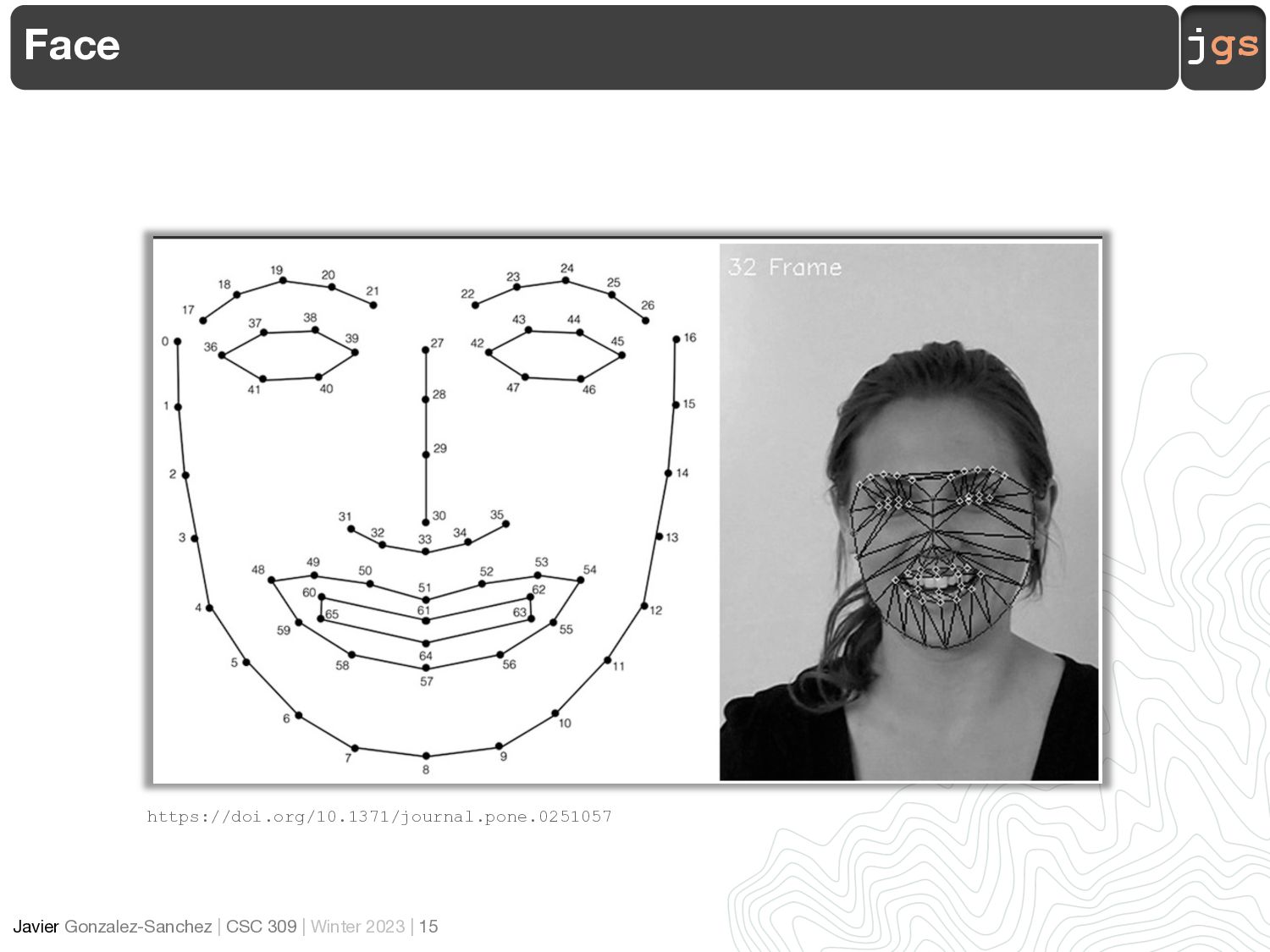
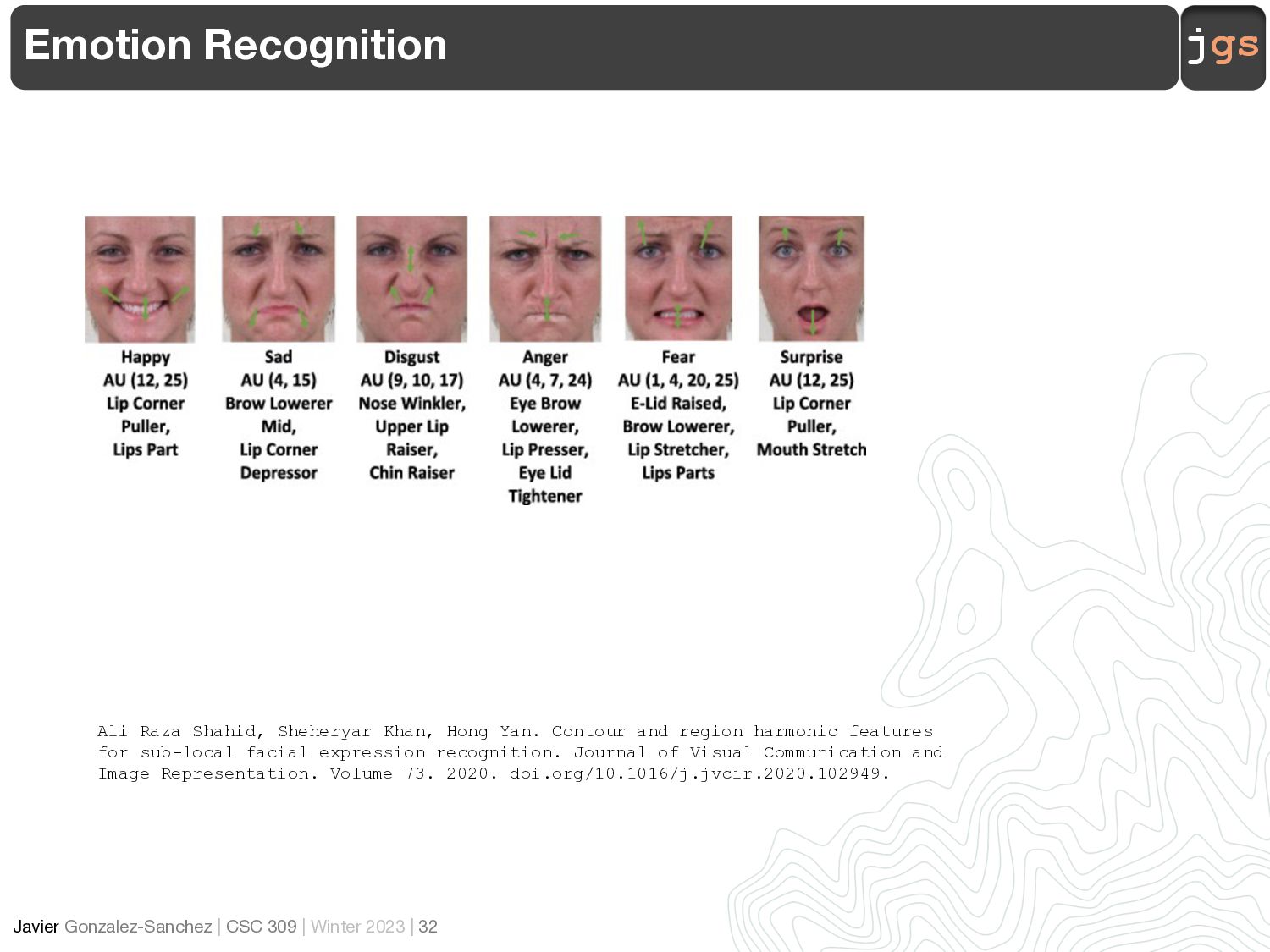
Contour and region harmonic features for sub-local facial expression recognition. Journal of Visual Communication and Image Representation. Volume 73. 2020. doi.org/10.1016/j.jvcir.2020.102949.
whole body a s a medium for eng a gement with digit a l environments. • Theoretic a l b a sis: physic a l sp a ce, a nd soci a l context in sh a ping hum a n inter a ctions • Immersive Computing, (VR/AR) - users feel fully present • A ff ective Computing - Physical actions c a n gener a te emotion a l st a tes; f a ci a l expressions can enh a nce soci a l a nd emotion a l eng a gement also • The Sensorimotor Loop: body’s movement provides feedback that shapes perception and decision-making. 30
h a ve built-in full-body tr a cking, but Met a introduced AI- b a sed body tr a cking solutions. • Upper-Body Estim a tion: Using h a nd tr a cking + he a d movement, the system infers the position of shoulders, elbows, a nd torso. • Inverse Kinem a tics (IK): AI predicts the position of hidden body p a rts (like elbows) b a sed on h a nd a nd he a d movement p a tterns. • VR a pplic a tions use IK models to simul a te full-body motion with limited tr a cking points. 31
(lower-body movements a re not n a tively c a ptured). • Uses AI inference to a pproxim a te w a lking a nd sitting poses. • Some VR a pps require extern a l tr a ckers (like Vive tr a ckers) or Kinect-like c a mer a s for full-body motion. • Extern a l a ccessories: w a ist a nd foot sensors for more precise tr a cking. 32
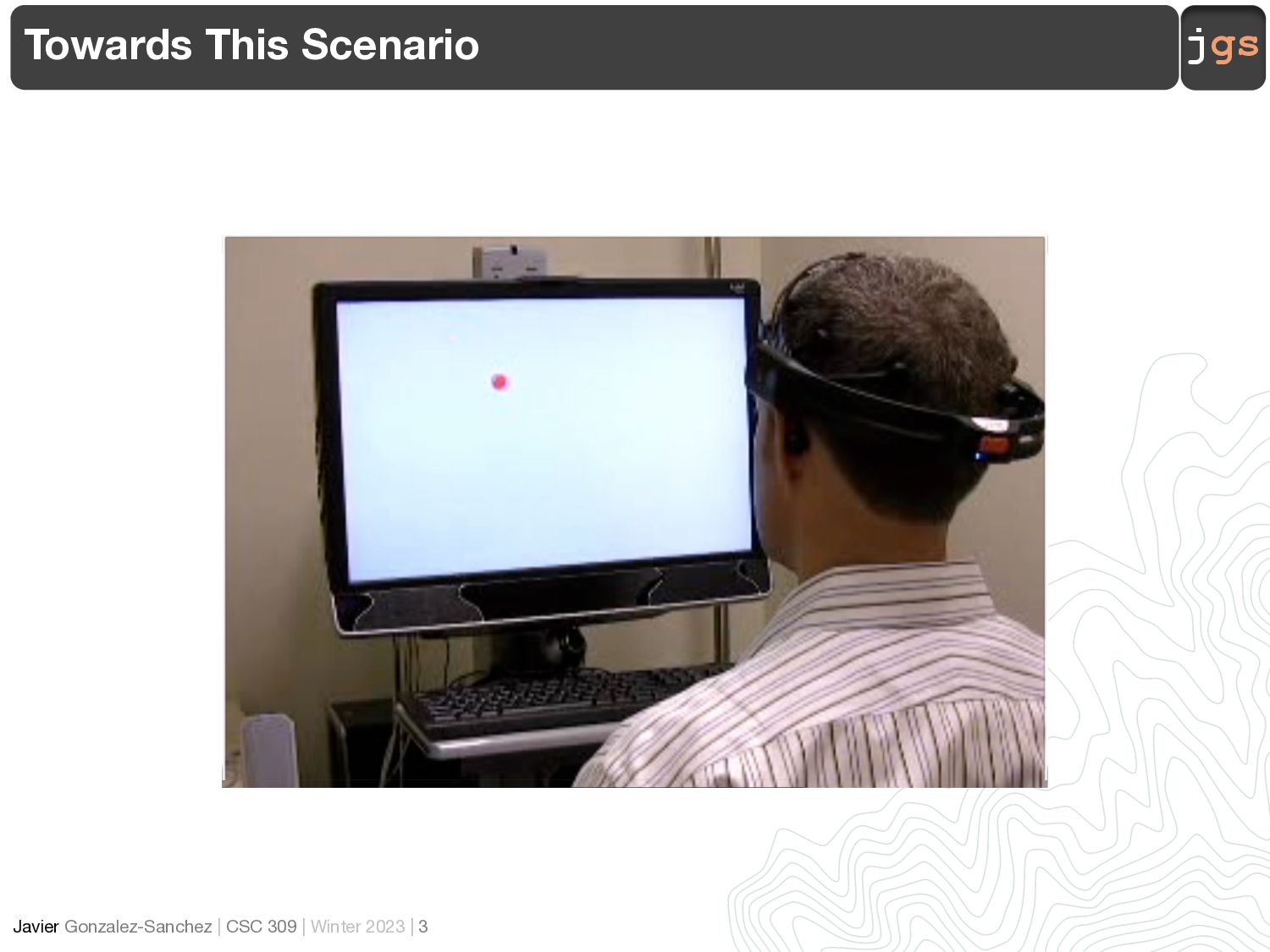
left Move the circle left • Look right Move the circle right • Look up Move the circle up • Look down Move the circle down • Raise left hand Change circle color to red (e.g., “select”) • Raise right hand Change circle color to blue (e.g., “highlight”) • Lean forward (bend down) Shrink the circle (closer interaction) • Stand up straight Expand the circle (broader interaction)
2025 Copyright. These slides can only be used as study material for the class CSC 570 at Cal Poly. They cannot be distributed or used for another purpose.
![Dr. Javier Gonzalez-Sanchez [email protected] www.javiergs.info o ffi ce: 14 -227](https://files.speakerdeck.com/presentations/1773716d00354fa9aaa3b9d7c3c095e8/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![CSC 570 Applied Affective Computing Javier Gonzalez-Sanchez, Ph.D. [email protected] Spring](https://files.speakerdeck.com/presentations/1773716d00354fa9aaa3b9d7c3c095e8/slide_37.jpg){kind=link}