April 2019 - March 2020 AI研究開発エンジニア@DeNA April 2010 - March 2019 主任研究員@三菱電機 March 2010 博士@東北大学 Data-Centric AIに関するコミュニティ 運営や書籍執筆活動してます https://gihyo.jp/book/2025/978-4-297-14663-4 https://dcai-jp.connpass.com/
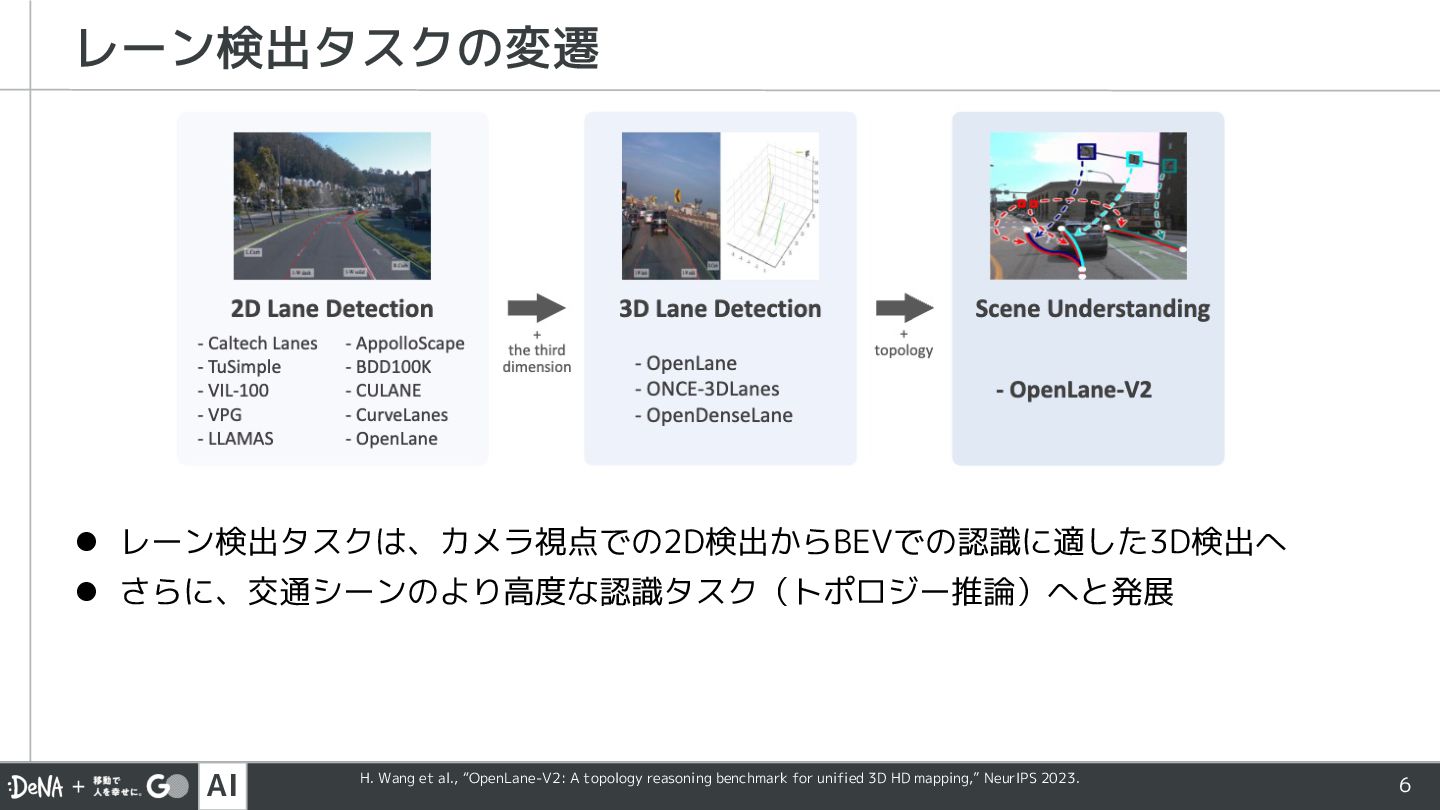
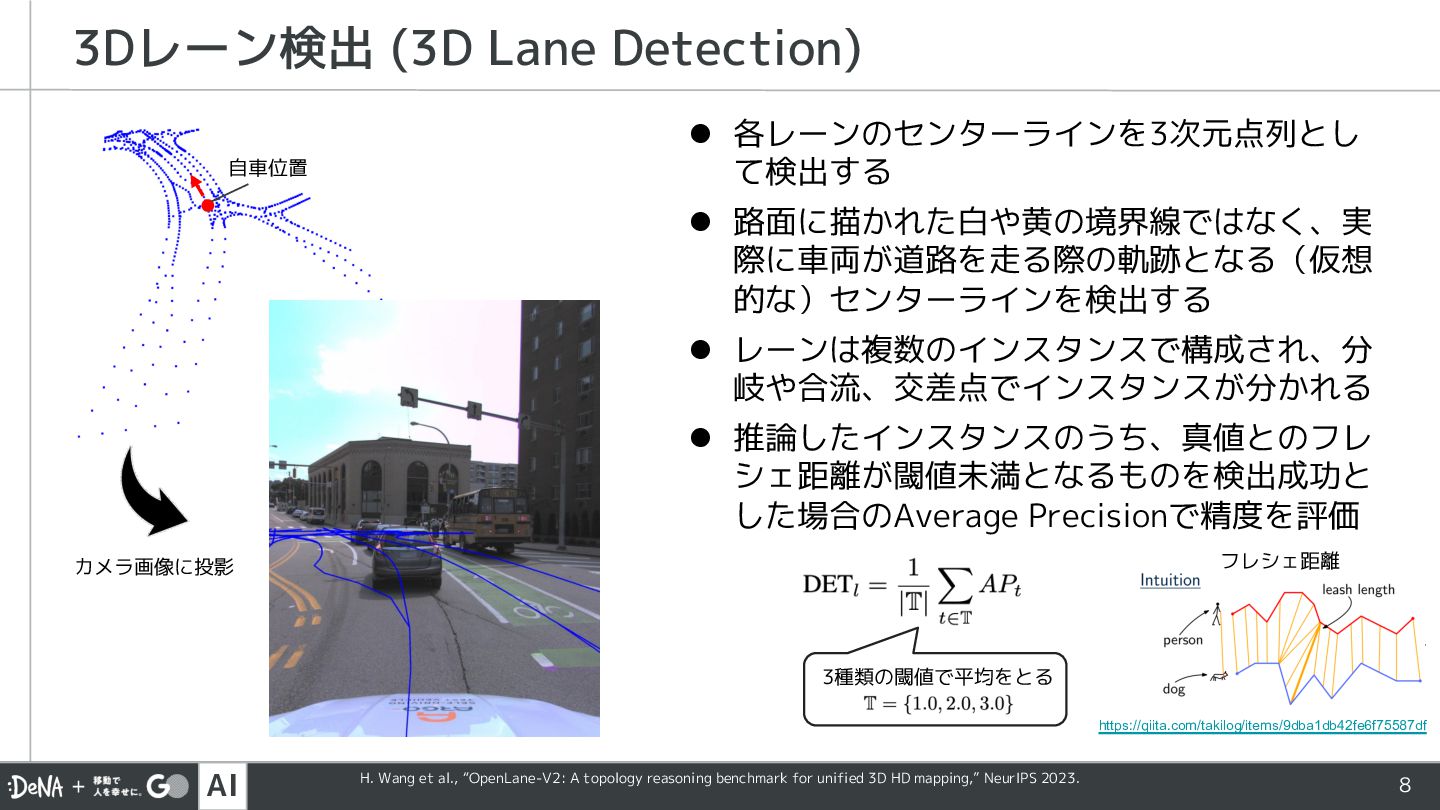
て検出する l 路面に描かれた白や黄の境界線ではなく、実 際に車両が道路を走る際の軌跡となる(仮想 的な)センターラインを検出する l レーンは複数のインスタンスで構成され、分 岐や合流、交差点でインスタンスが分かれる l 推論したインスタンスのうち、真値とのフレ シェ距離が閾値未満となるものを検出成功と した場合のAverage Precisionで精度を評価 フレシェ距離 https://qiita.com/takilog/items/9dba1db42fe6f75587df 3種類の閾値で平均をとる H. Wang et al., “OpenLane-V2: A topology reasoning benchmark for unified 3D HD mapping,” NeurIPS 2023.
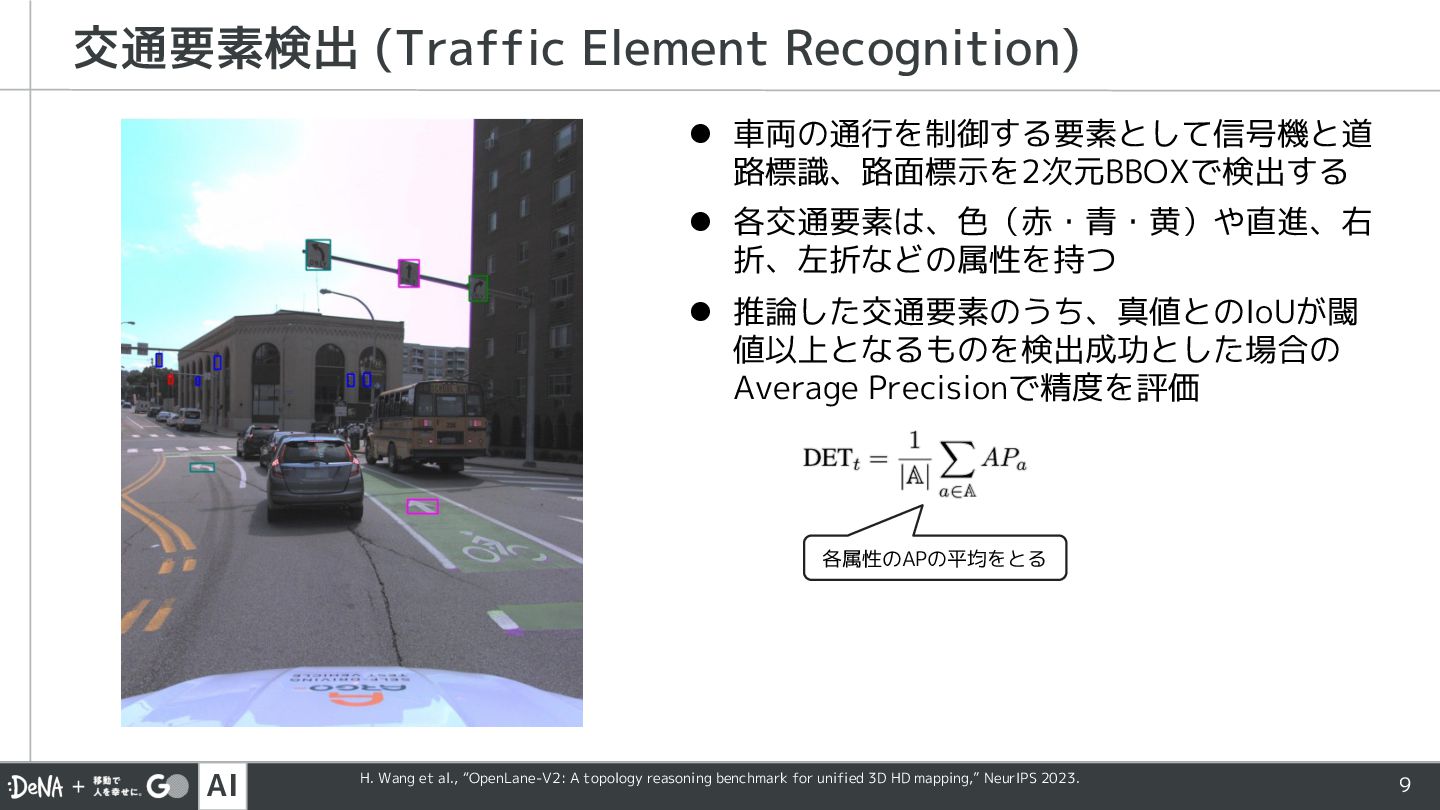
各交通要素は、色(赤・青・黄)や直進、右 折、左折などの属性を持つ l 推論した交通要素のうち、真値とのIoUが閾 値以上となるものを検出成功とした場合の Average Precisionで精度を評価 各属性のAPの平均をとる H. Wang et al., “OpenLane-V2: A topology reasoning benchmark for unified 3D HD mapping,” NeurIPS 2023.
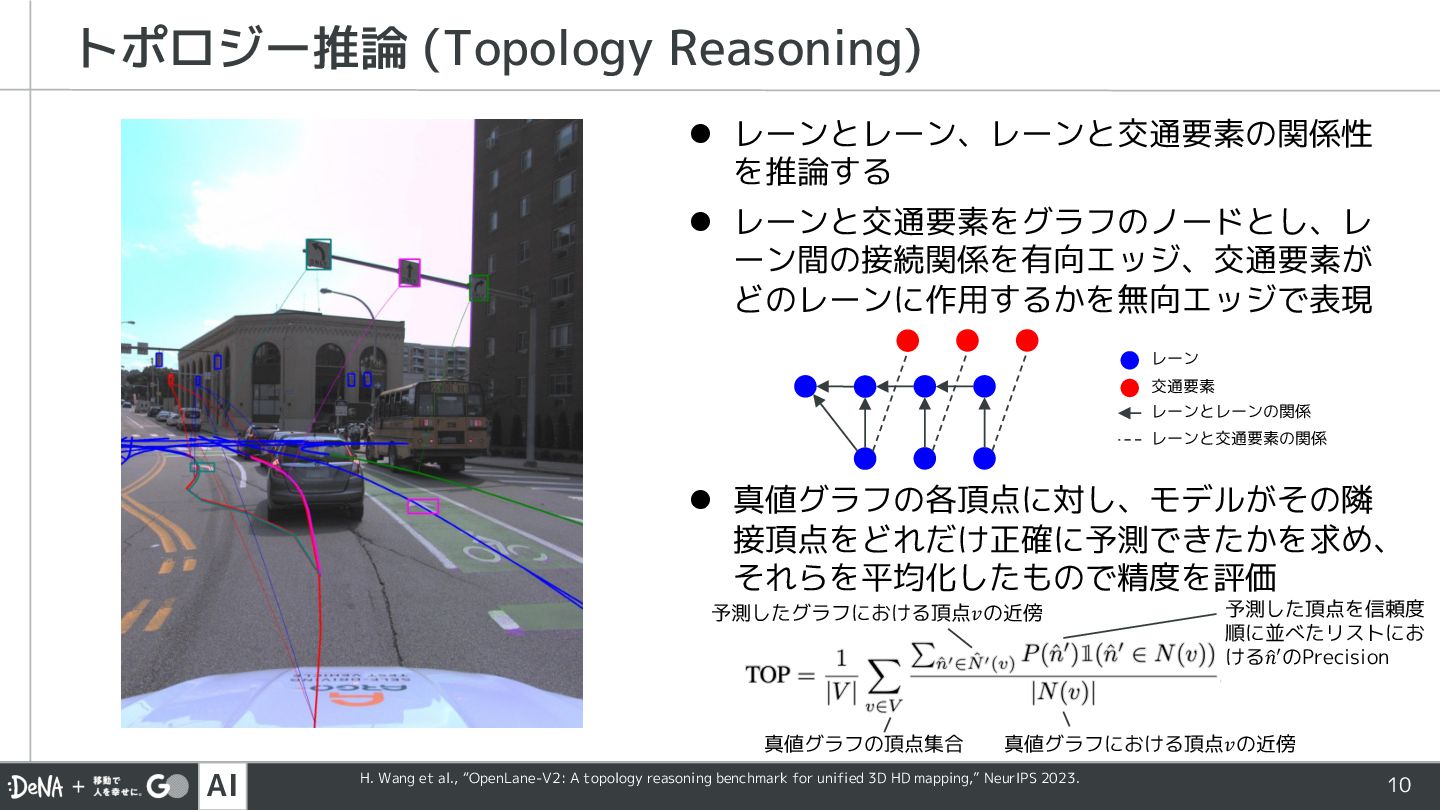
ーン間の接続関係を有向エッジ、交通要素が どのレーンに作用するかを無向エッジで表現 l 真値グラフの各頂点に対し、モデルがその隣 接頂点をどれだけ正確に予測できたかを求め、 それらを平均化したもので精度を評価 レーン 交通要素 レーンとレーンの関係 レーンと交通要素の関係 真値グラフの頂点集合 真値グラフにおける頂点𝑣の近傍 予測したグラフにおける頂点𝑣の近傍 予測した頂点を信頼度 順に並べたリストにお ける" 𝑛′のPrecision H. Wang et al., “OpenLane-V2: A topology reasoning benchmark for unified 3D HD mapping,” NeurIPS 2023.
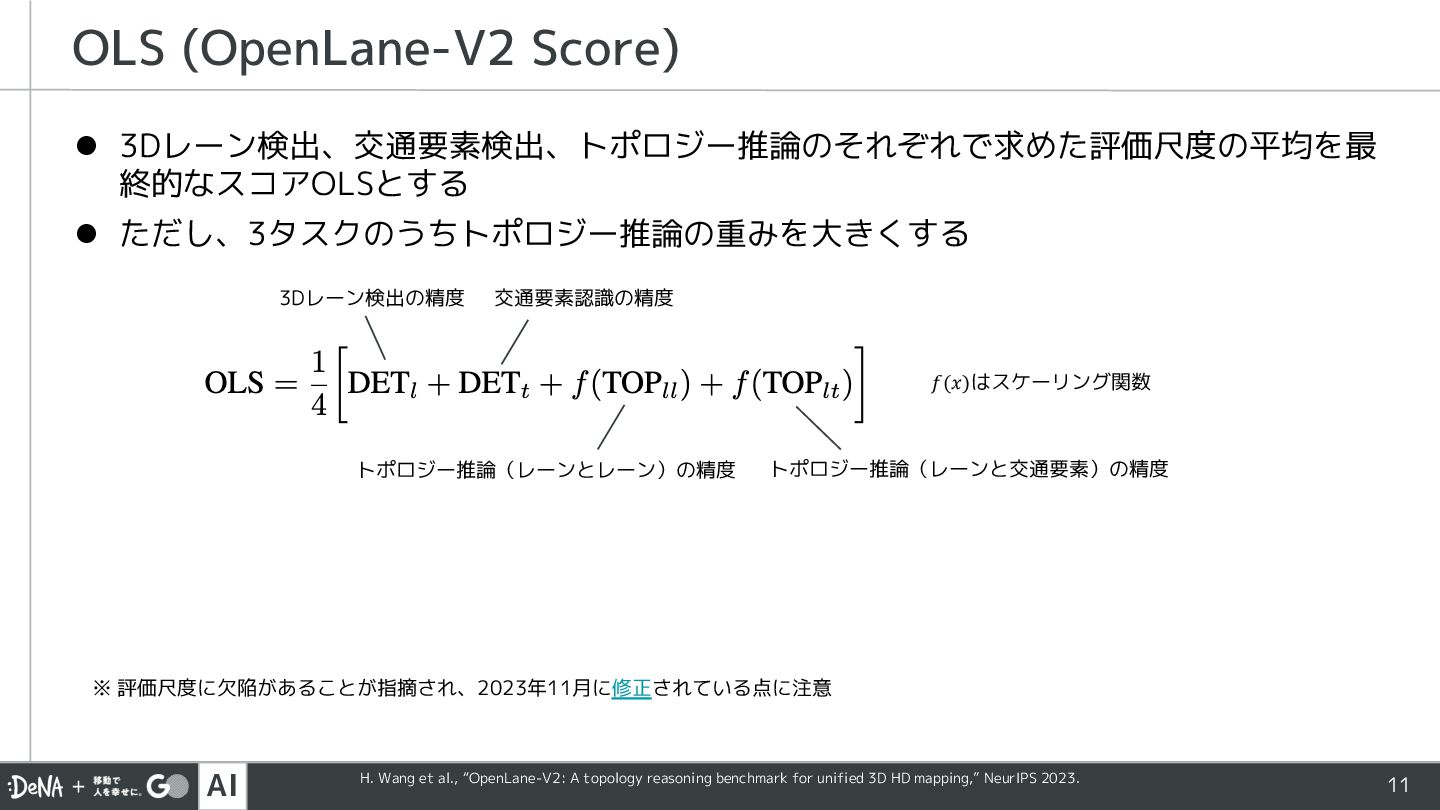
3Dレーン検出の精度 交通要素認識の精度 トポロジー推論(レーンとレーン)の精度 トポロジー推論(レーンと交通要素)の精度 𝑓(𝑥)はスケーリング関数 H. Wang et al., “OpenLane-V2: A topology reasoning benchmark for unified 3D HD mapping,” NeurIPS 2023. ※ 評価尺度に欠陥があることが指摘され、2023年11月に修正されている点に注意
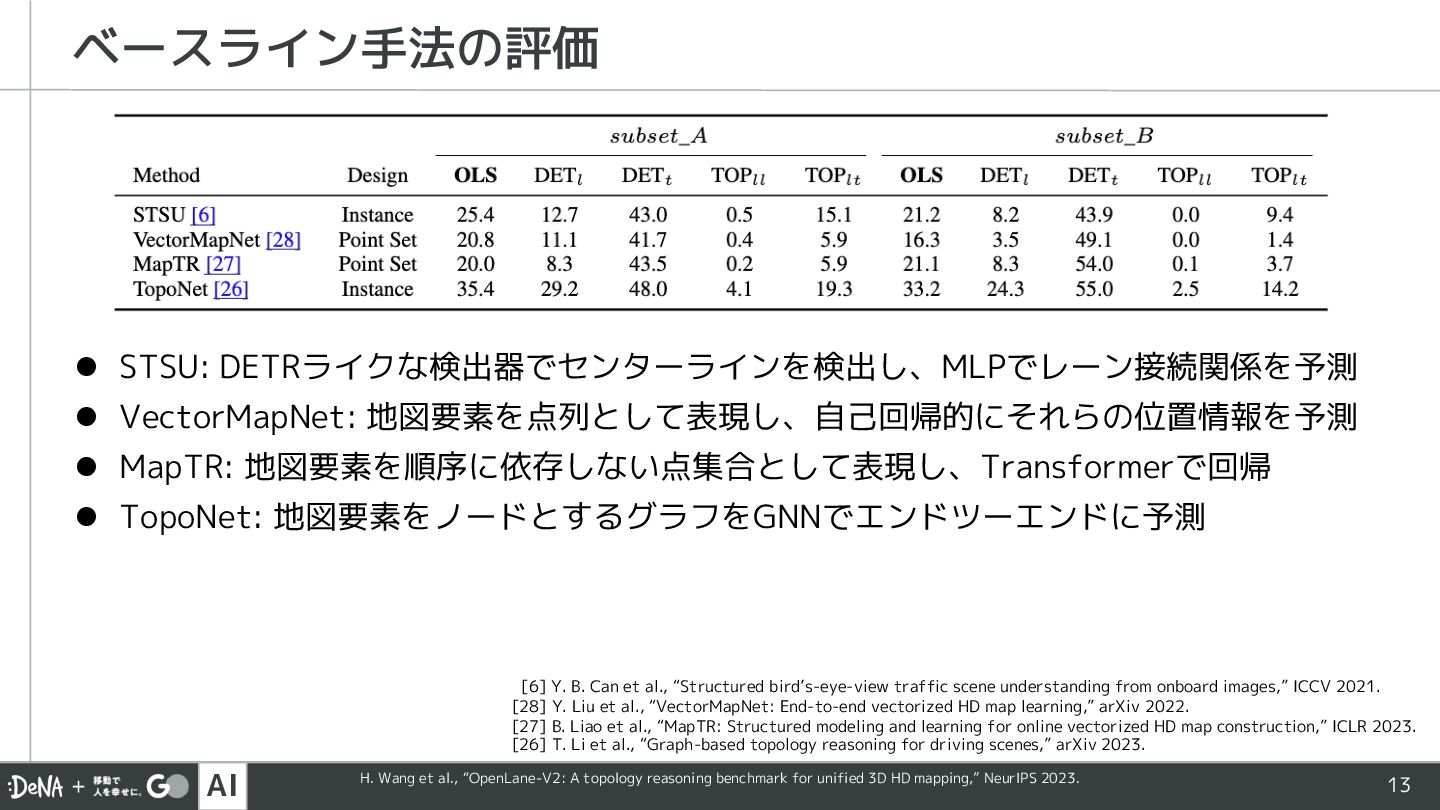
MapTR: 地図要素を順序に依存しない点集合として表現し、Transformerで回帰 l TopoNet: 地図要素をノードとするグラフをGNNでエンドツーエンドに予測 [6] Y. B. Can et al., “Structured bird’s-eye-view traffic scene understanding from onboard images,” ICCV 2021. [28] Y. Liu et al., “VectorMapNet: End-to-end vectorized HD map learning,” arXiv 2022. [27] B. Liao et al., “MapTR: Structured modeling and learning for online vectorized HD map construction,” ICLR 2023. [26] T. Li et al., “Graph-based topology reasoning for driving scenes,” arXiv 2023. H. Wang et al., “OpenLane-V2: A topology reasoning benchmark for unified 3D HD mapping,” NeurIPS 2023.
レーン/交通要素の検出精度がトポロジー推論の精度に大きく影響することを指摘 l レーンと交通要素のそれぞれに対してDETRベースの高精度な検出器を提案し、それら の結果を使ったトポロジー推論にはシンプルなMLPを適用 l CVPR 2023 Autonomous Driving ChallengeのOpenLane Topology Trackで1位を獲得 D. Wu et al., “TopoMLP: A simple yet strong pipeline for driving topology reasoning,” ICLR 2024.
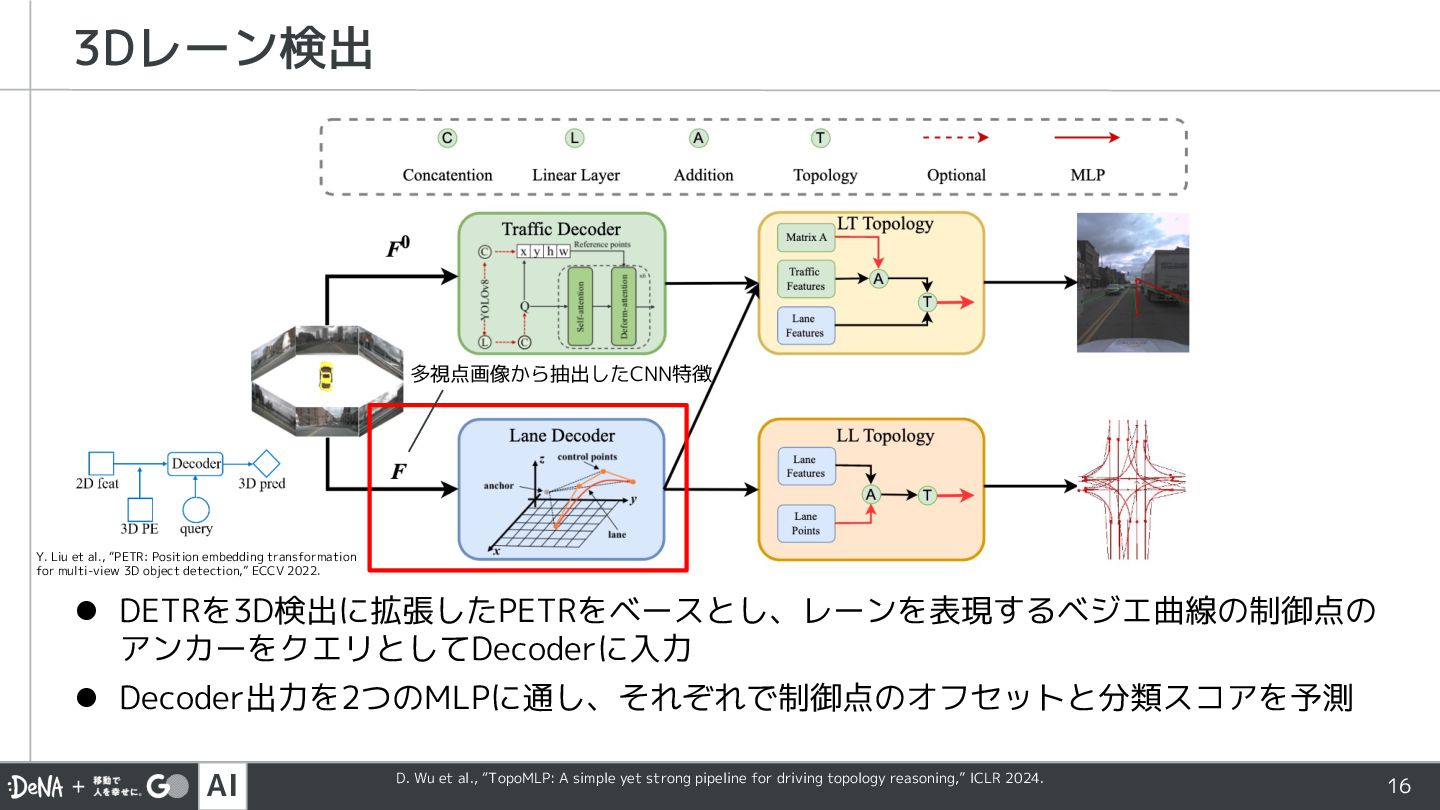
transformation for multi-view 3D object detection,” ECCV 2022. l DETRを3D検出に拡張したPETRをベースとし、レーンを表現するベジエ曲線の制御点の アンカーをクエリとしてDecoderに入力 l Decoder出力を2つのMLPに通し、それぞれで制御点のオフセットと分類スコアを予測 多視点画像から抽出したCNN特徴 D. Wu et al., “TopoMLP: A simple yet strong pipeline for driving topology reasoning,” ICLR 2024.
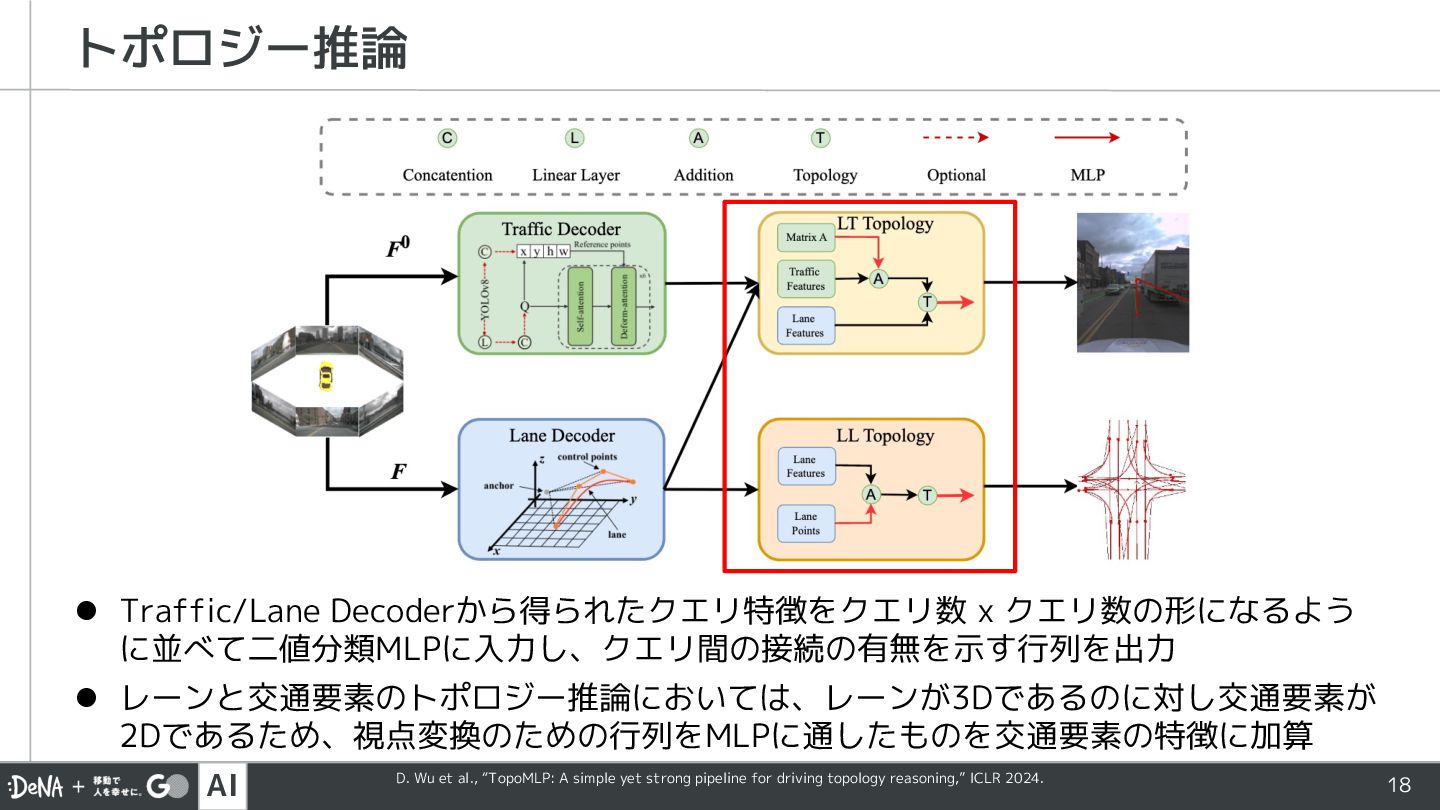
レーンと交通要素のトポロジー推論においては、レーンが3Dであるのに対し交通要素が 2Dであるため、視点変換のための行列をMLPに通したものを交通要素の特徴に加算 D. Wu et al., “TopoMLP: A simple yet strong pipeline for driving topology reasoning,” ICLR 2024.
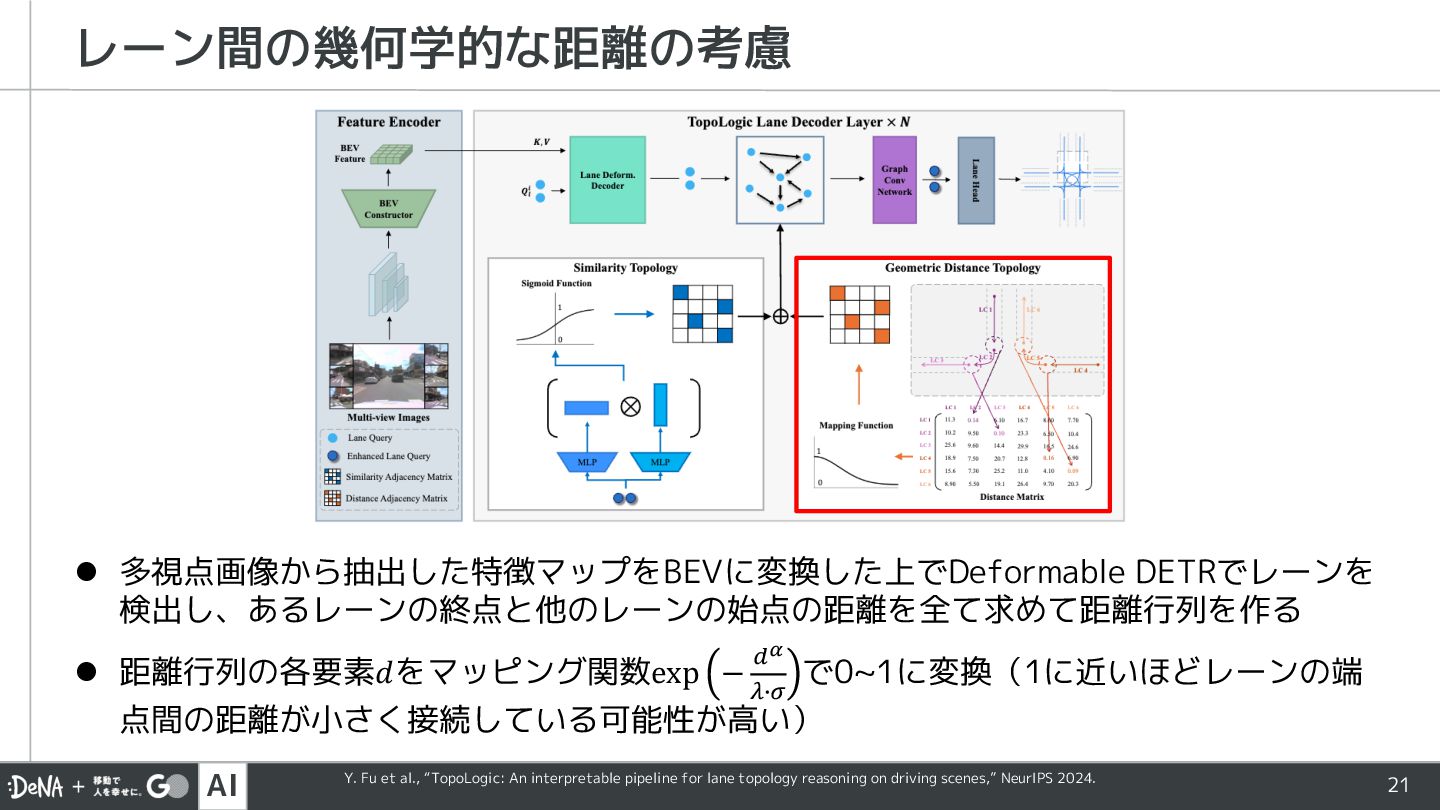
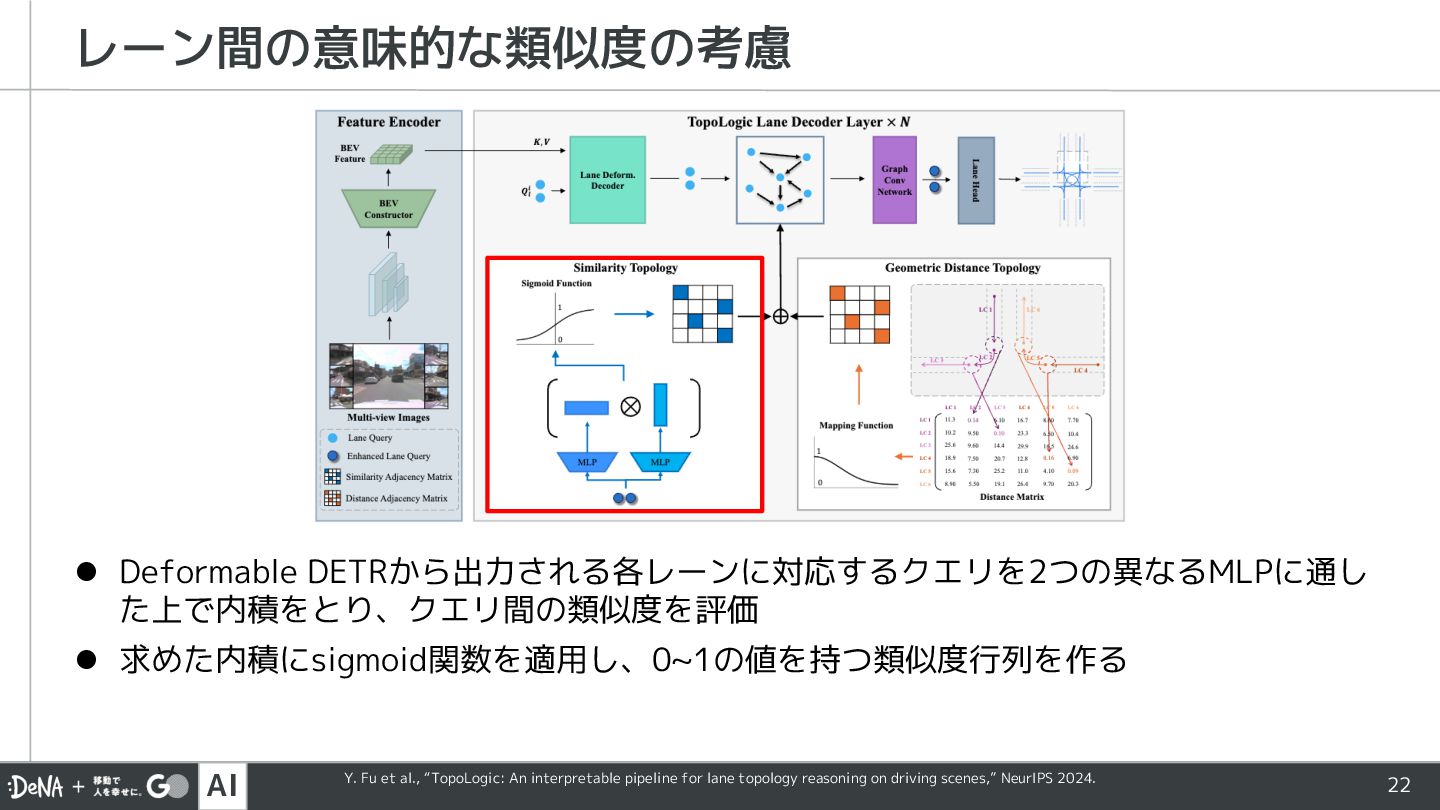
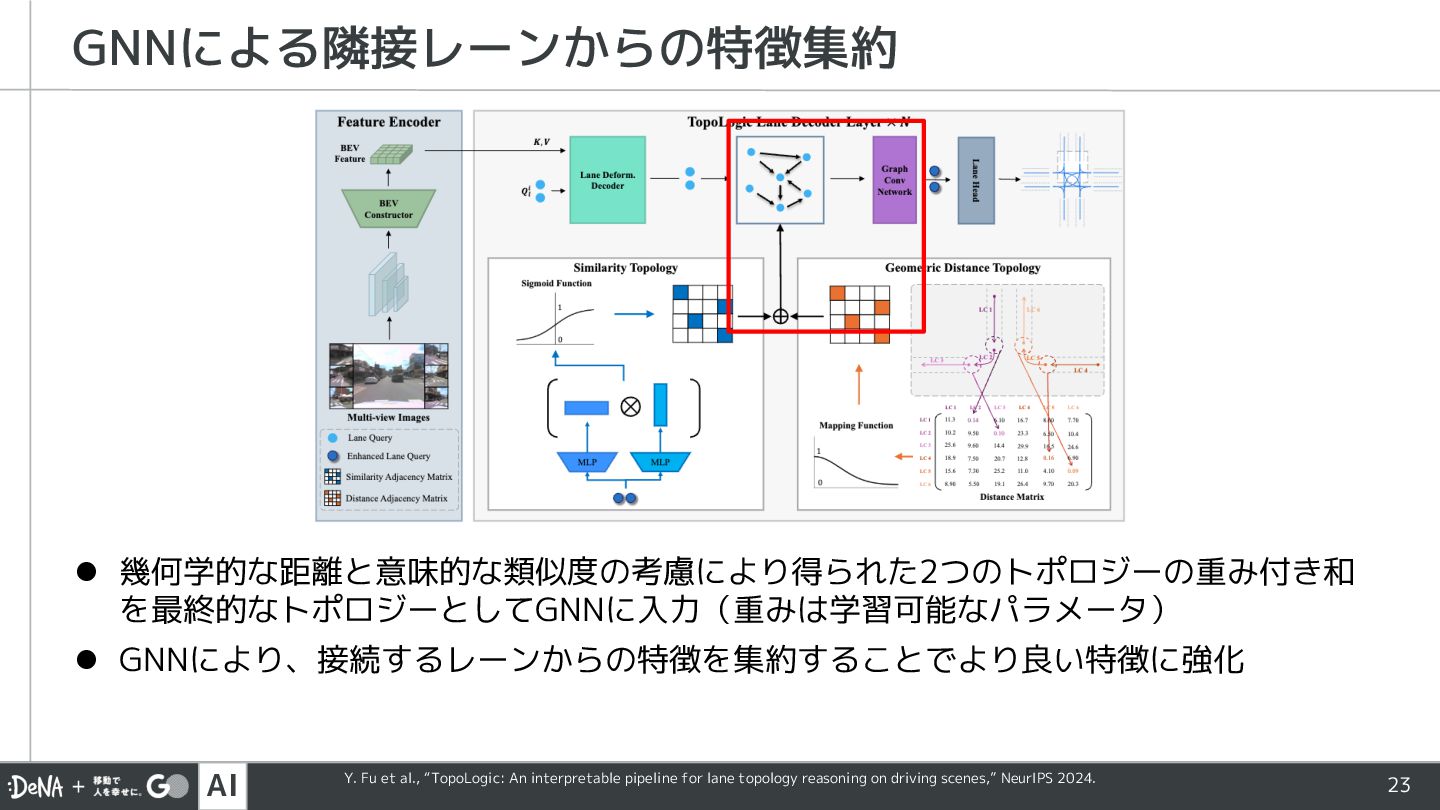
従来手法では、レーン検出の性能改善を重視しトポロジー推論が単純な傾向があるため、 検出したレーンの端点がずれただけでレーン間の接続認識に失敗することを指摘 l トポロジー推論において、レーン間の幾何学的な距離と意味的な類似度を明示的に考慮 することでレーン検出の誤差に対するロバスト性を向上 Y. Fu et al., “TopoLogic: An interpretable pipeline for lane topology reasoning on driving scenes,” NeurIPS 2024.
!+ &'( で0~1に変換(1に近いほどレーンの端 点間の距離が小さく接続している可能性が高い) Y. Fu et al., “TopoLogic: An interpretable pipeline for lane topology reasoning on driving scenes,” NeurIPS 2024.
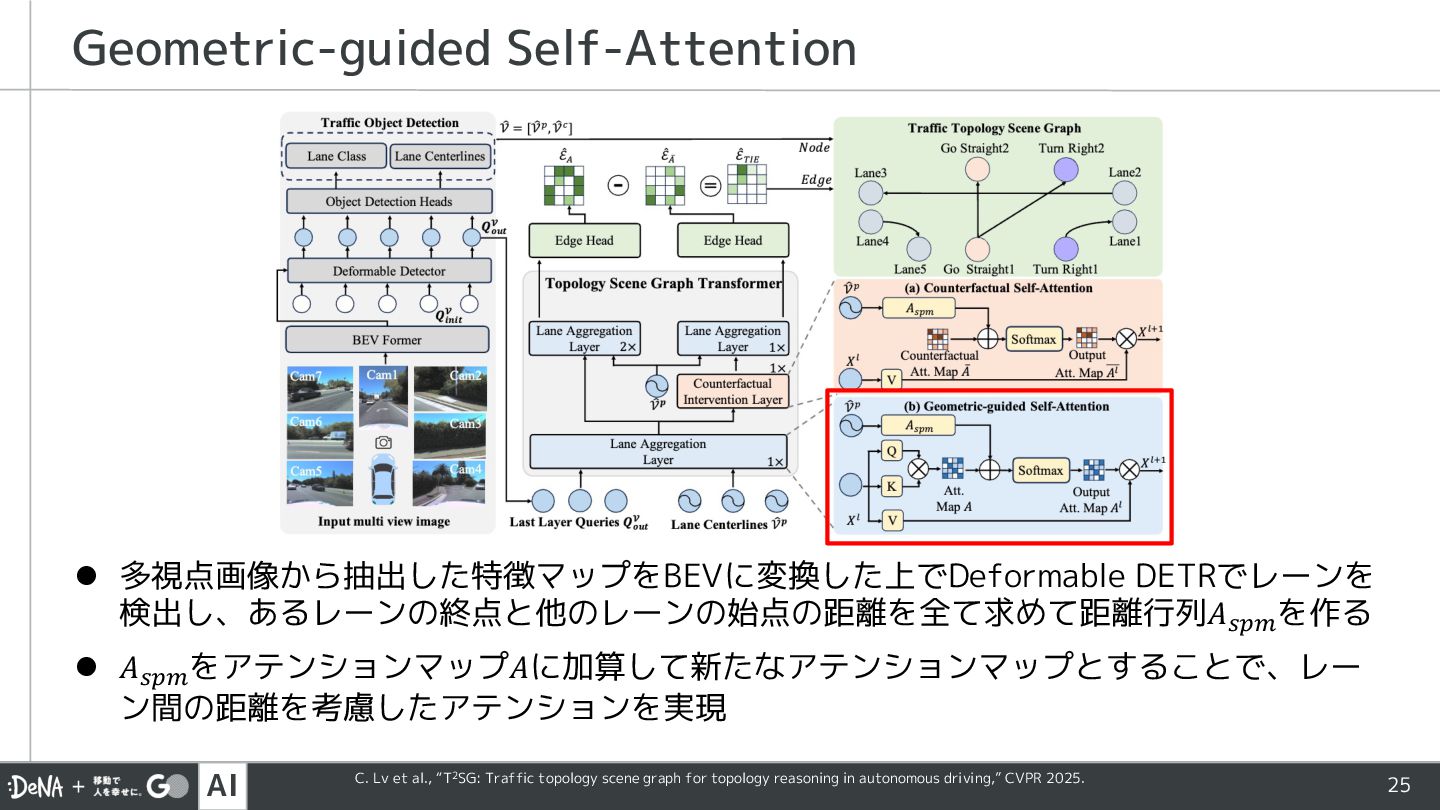
l レーン検出とトポロジー推論の双方において交通要素が持つ制御情報を活用するため、 新たな表現方法としてレーンと制御情報を統一的に扱うT2SG (Traffic Topology Scene Graph) と、 T2SGを生成するTopoFormerを提案 l T2SGは、レーンをノードとする有向グラフであり、各ノードはそのレーンが従う制御情 報をカテゴリラベルとして持つ 従来の表現方法 提案する表現方法 (T2SG) C. Lv et al., “T2SG: Traffic topology scene graph for topology reasoning in autonomous driving,” CVPR 2025.
𝐴)%* をアテンションマップ𝐴に加算して新たなアテンションマップとすることで、レー ン間の距離を考慮したアテンションを実現 C. Lv et al., “T2SG: Traffic topology scene graph for topology reasoning in autonomous driving,” CVPR 2025.
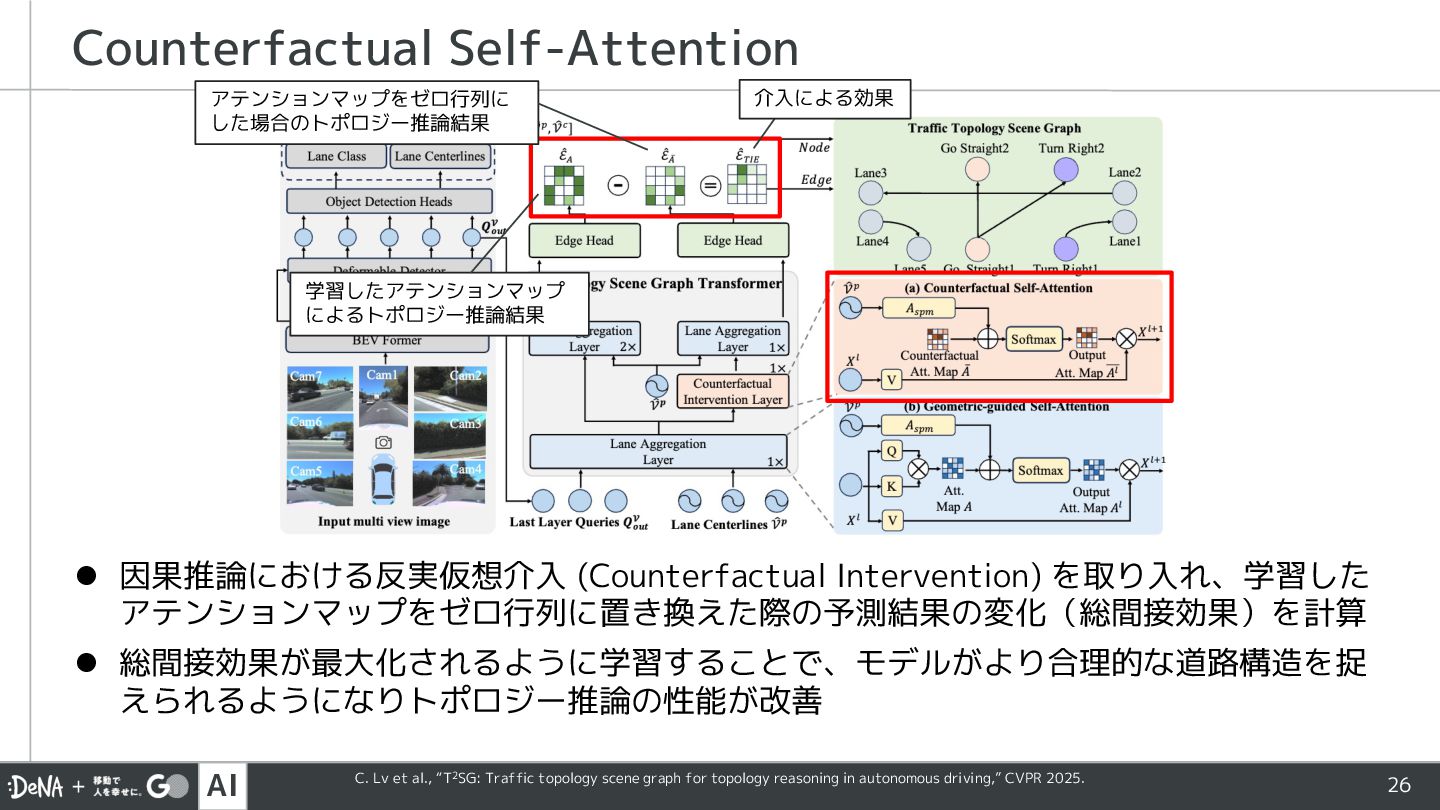
l 総間接効果が最大化されるように学習することで、モデルがより合理的な道路構造を捉 えられるようになりトポロジー推論の性能が改善 学習したアテンションマップ によるトポロジー推論結果 アテンションマップをゼロ行列に した場合のトポロジー推論結果 介入による効果 C. Lv et al., “T2SG: Traffic topology scene graph for topology reasoning in autonomous driving,” CVPR 2025.
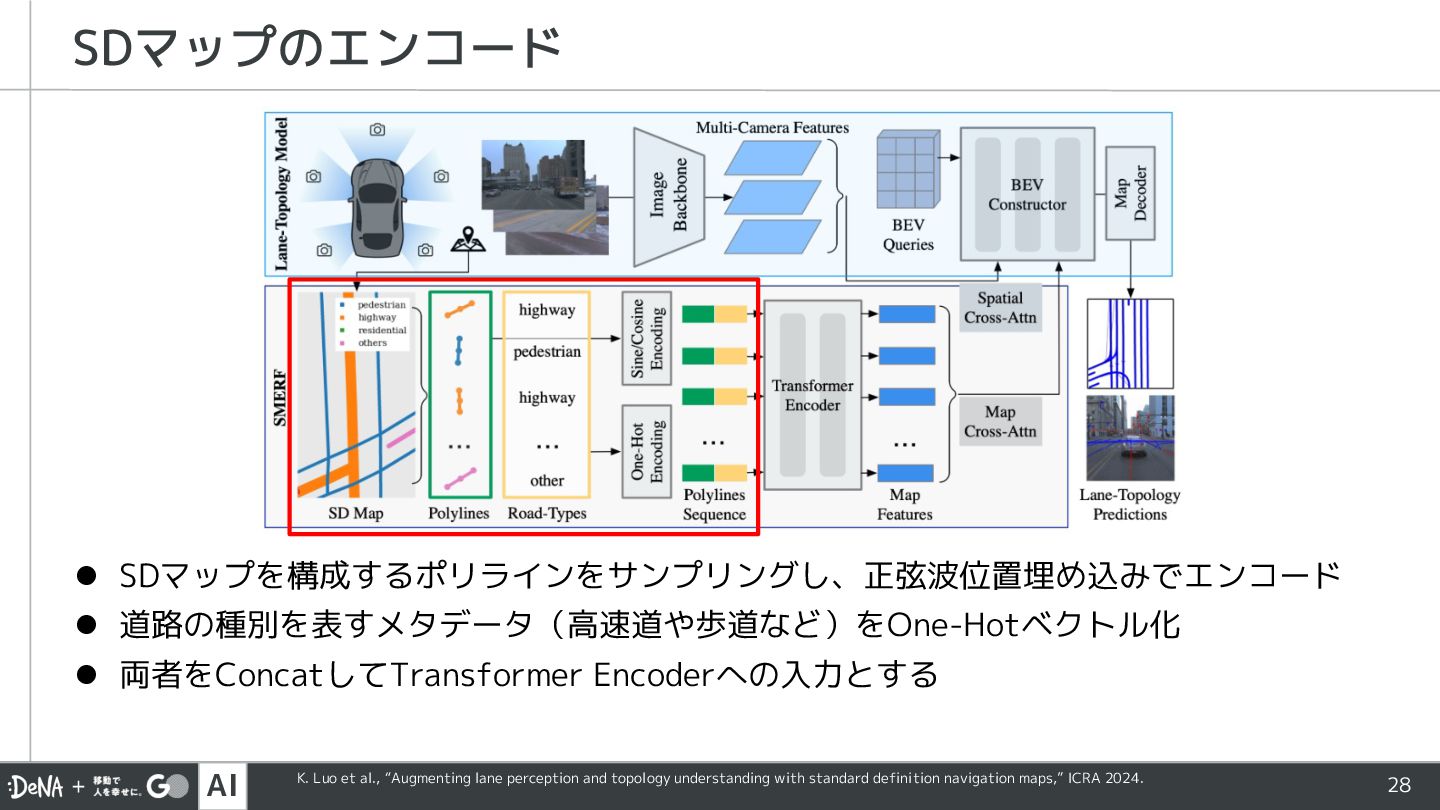
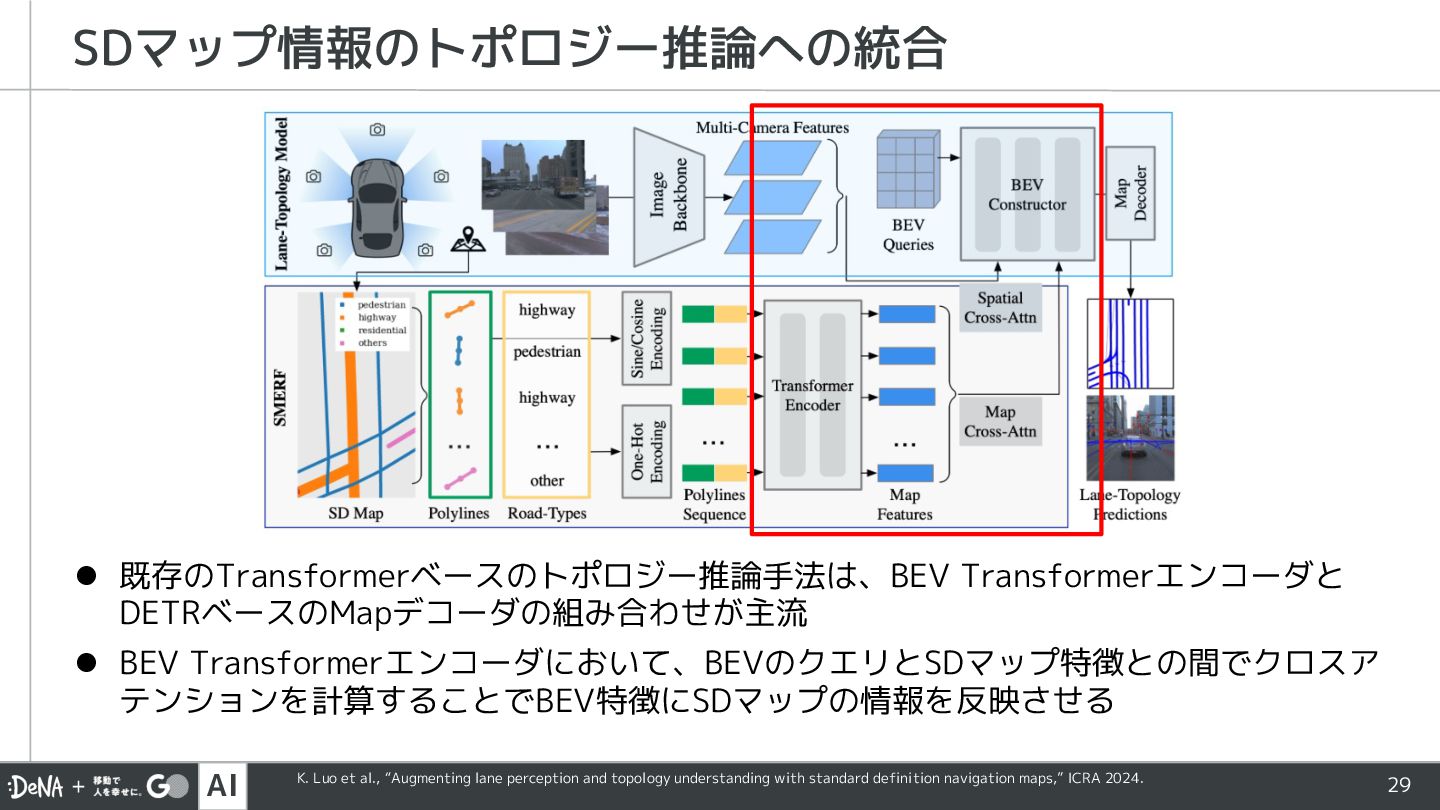
Encoder Representations from transFormers) を提案し、SDマップを事前知識として活用する ことでトポロジー推論の性能を改善 l Transformerベースであればどのようなトポロジー推論手法にも組み込み可能 Paper / GitHub / Project レーンレベルの詳細な 幾何的/意味的情報を持 つHDマップに比べ、SD マップは道路レベルの 情報程度しか持たない K. Luo et al., “Augmenting lane perception and topology understanding with standard definition navigation maps,” ICRA 2024.
テンションを計算することでBEV特徴にSDマップの情報を反映させる K. Luo et al., “Augmenting lane perception and topology understanding with standard definition navigation maps,” ICRA 2024.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![AI 5 OpenLane-V2 [Wang+, NeurIPS 2023] Paper GitHub H. Wang](https://files.speakerdeck.com/presentations/d8daeb0ec50c46bc95404c3bdd683a1a/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![AI 15 TopoMLP [Wu+, ICLR 2024] Paper / GitHub l](https://files.speakerdeck.com/presentations/d8daeb0ec50c46bc95404c3bdd683a1a/slide_14.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![AI 20 TopoLogic [Fu+, NeurIPS 2024] Paper / GitHub l](https://files.speakerdeck.com/presentations/d8daeb0ec50c46bc95404c3bdd683a1a/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![AI 24 TopoFormer [Lv+, CVPR 2025] Paper l 従来のトポロジー表現では、レーンと交通要素は独立して扱われており、レーンと交通 要素を異なるノードで定義して両者間のエッジで関係性を表していた](https://files.speakerdeck.com/presentations/d8daeb0ec50c46bc95404c3bdd683a1a/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
![AI 27 SMERF [Luo+, ICRA 2024] l TransformerによりSDマップの情報をエンコードするSMERF (SD Map](https://files.speakerdeck.com/presentations/d8daeb0ec50c46bc95404c3bdd683a1a/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}