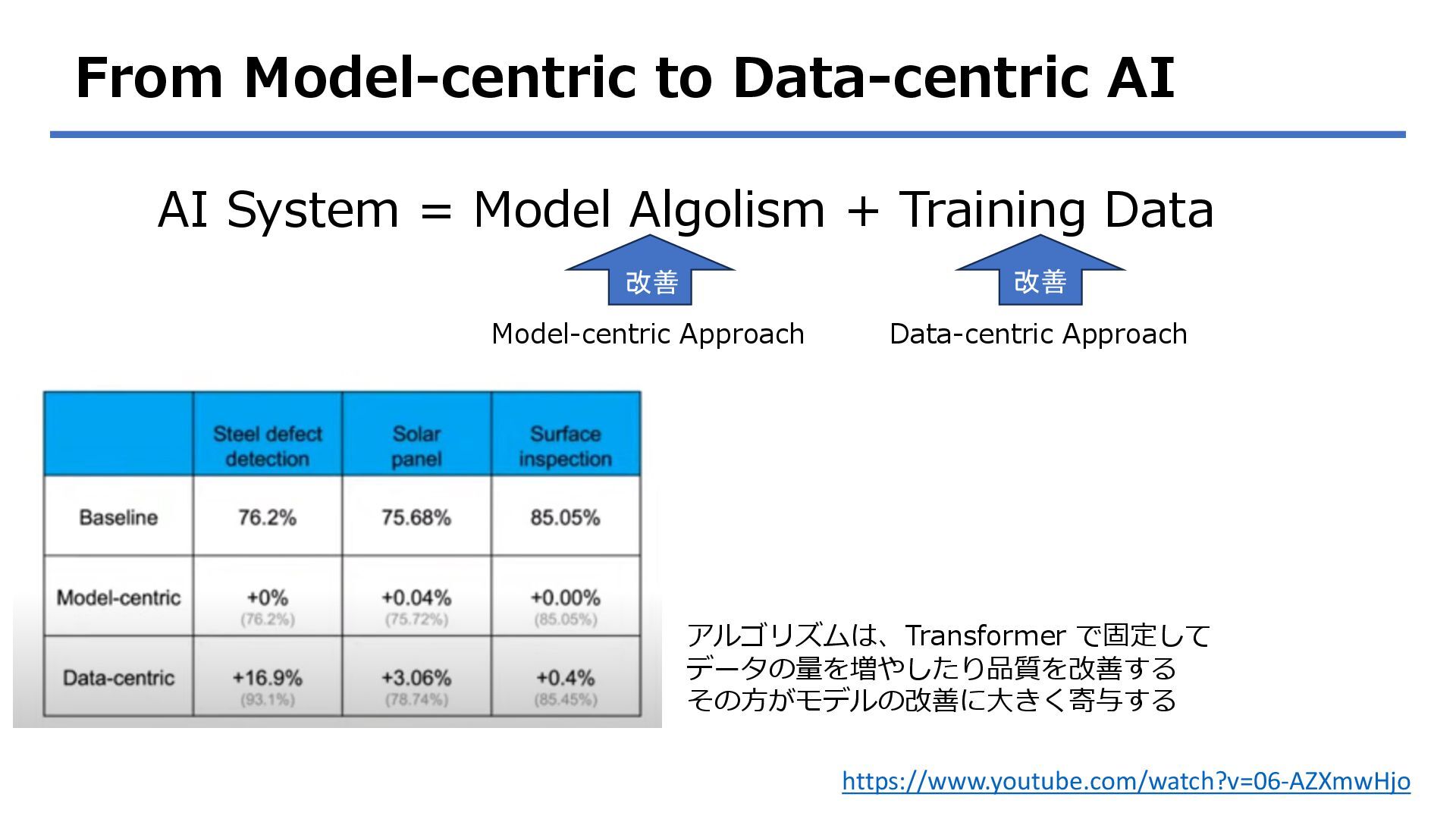
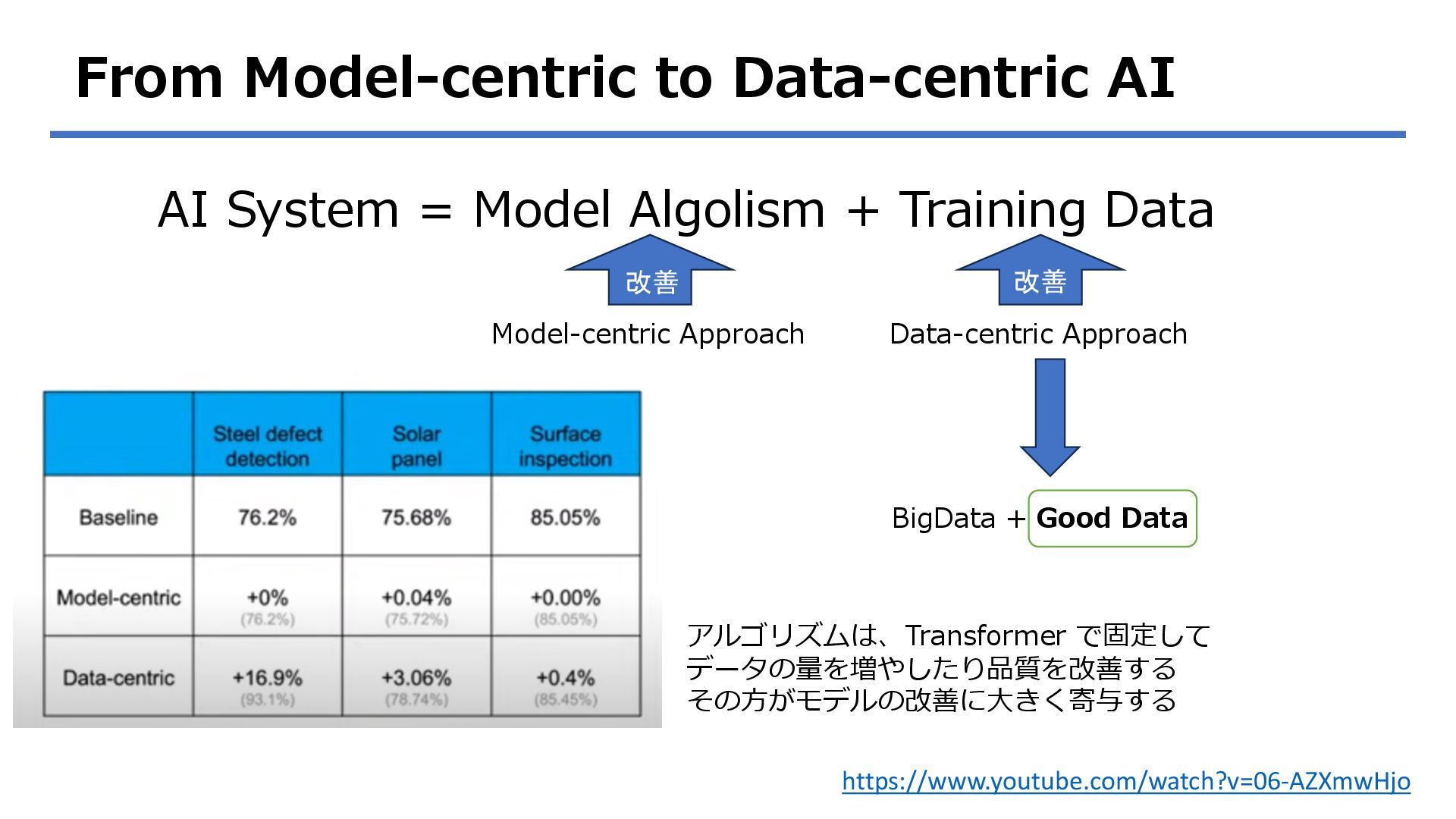
Algolism + Training Data Model-centric Approach Data-centric Approach 改善 改善 アルゴリズムは、Transformer で固定して データの量を増やしたり品質を改善する その⽅がモデルの改善に⼤きく寄与する BigData + Good Data
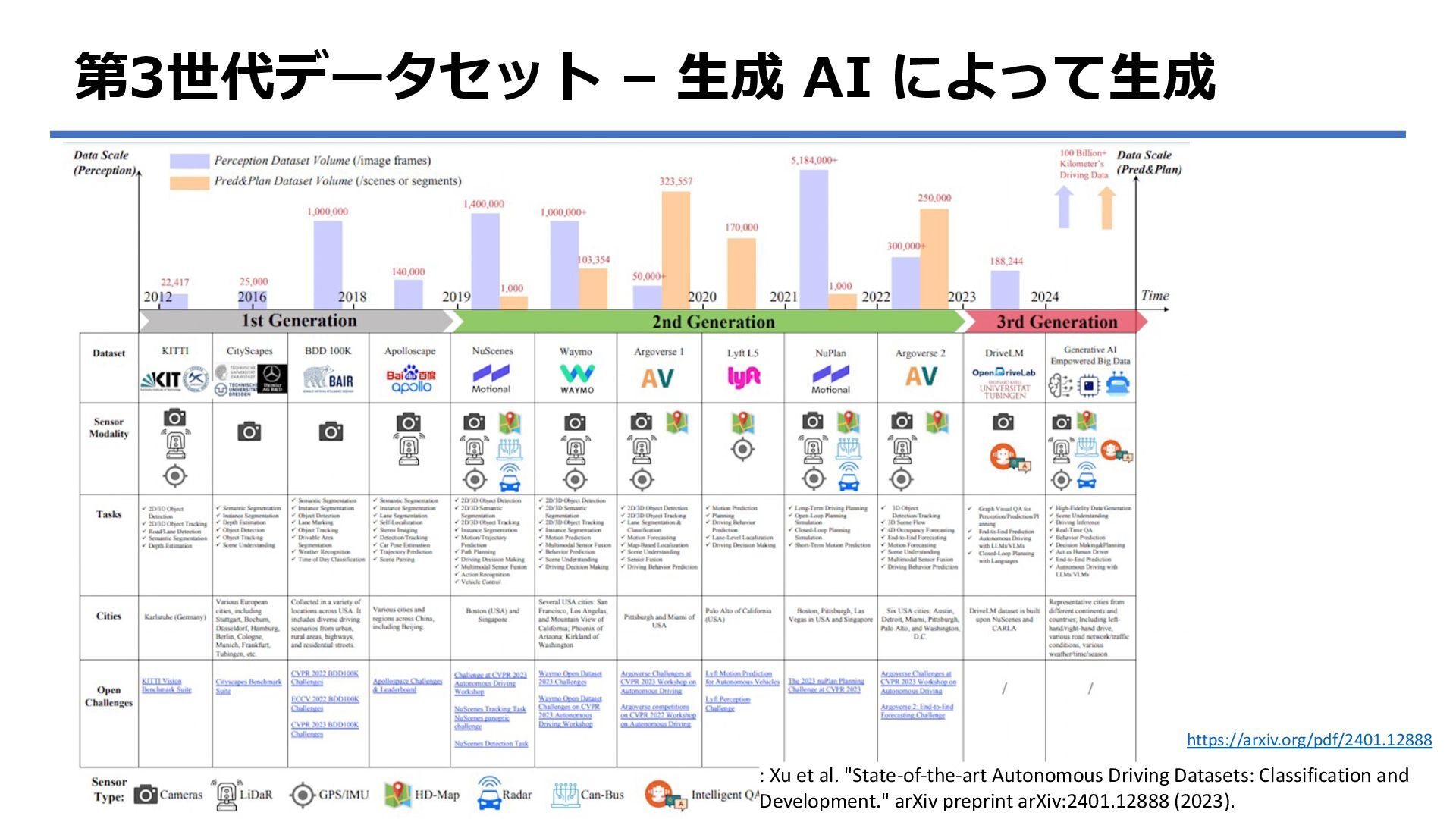
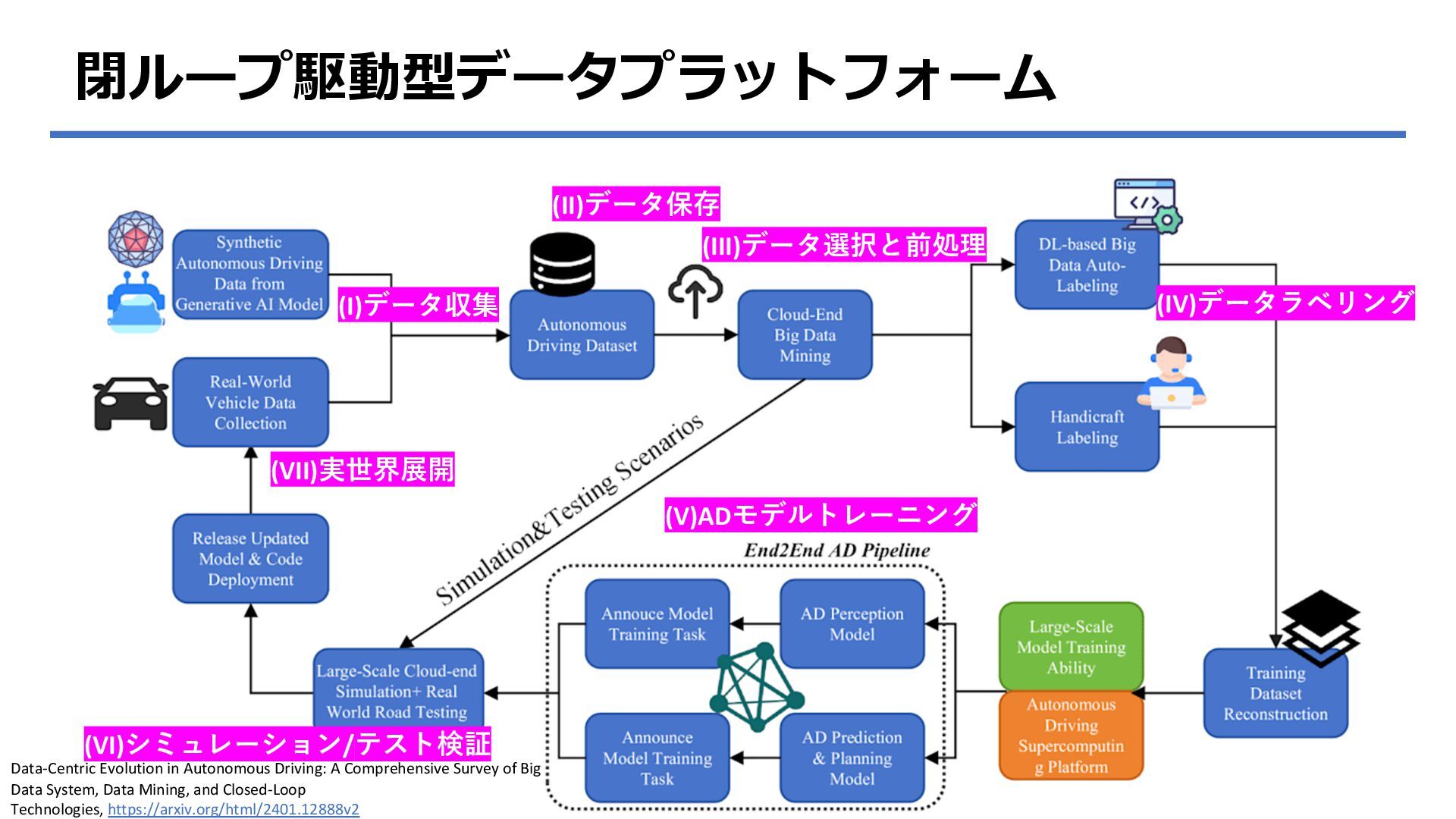
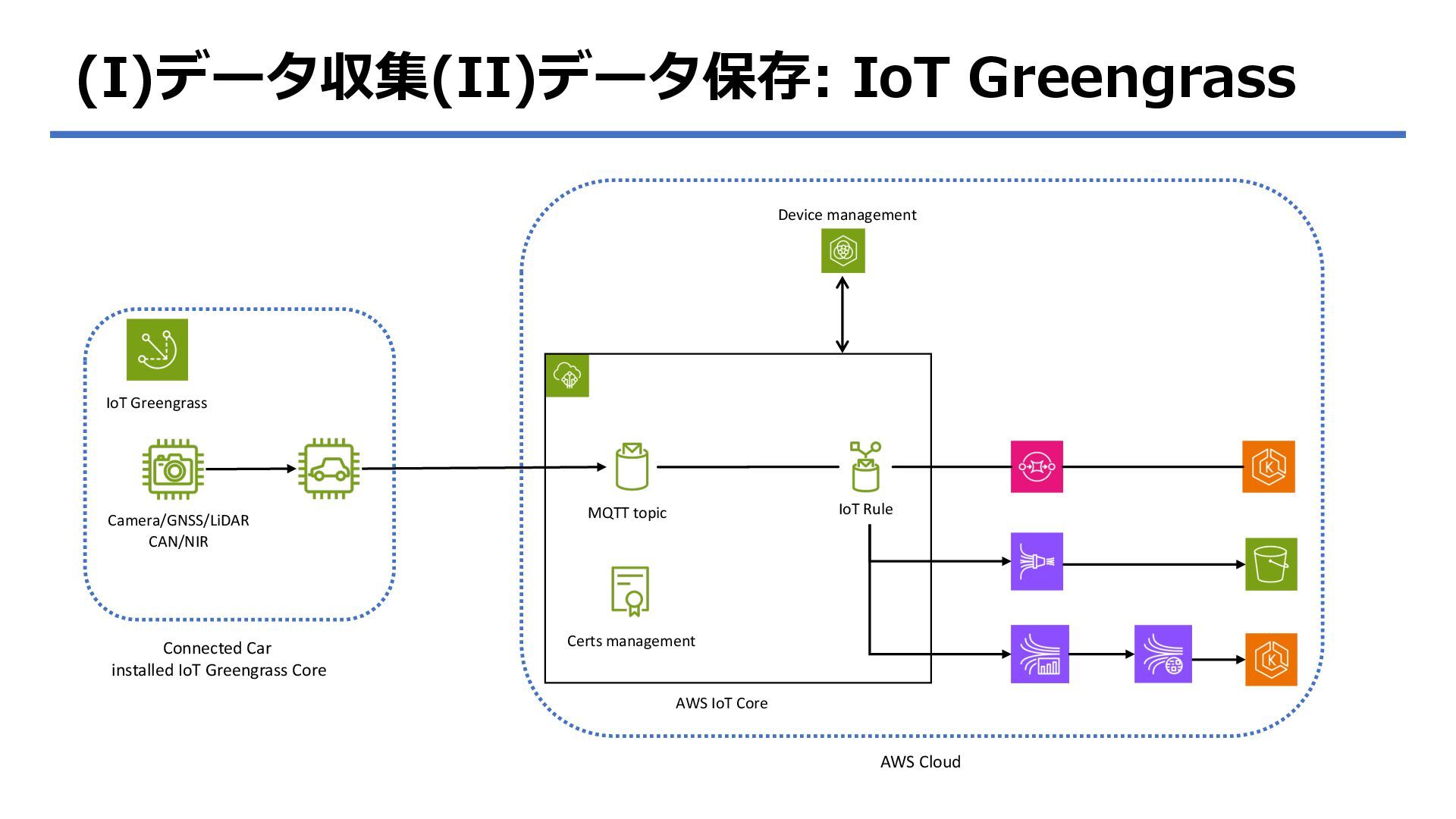
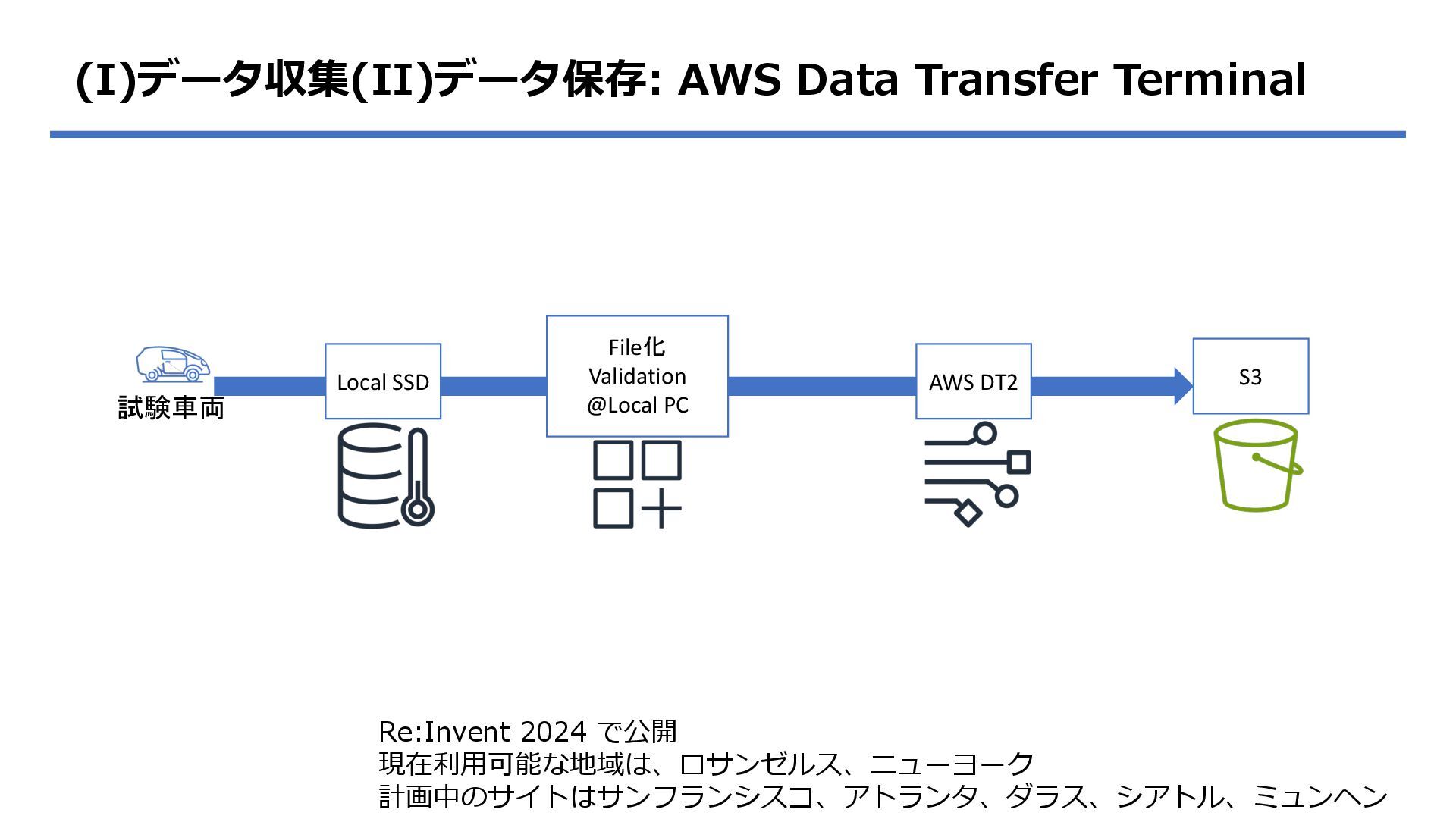
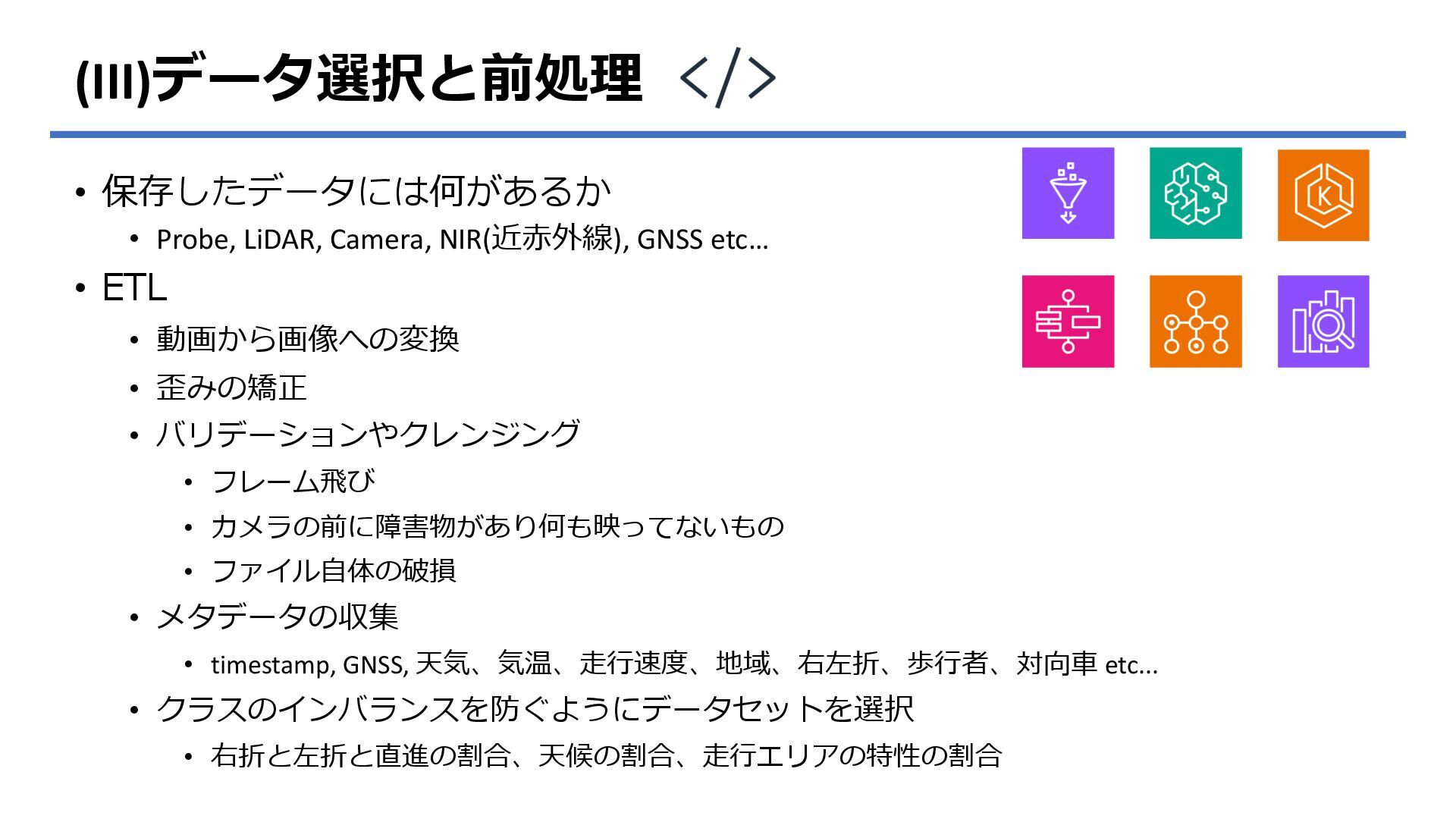
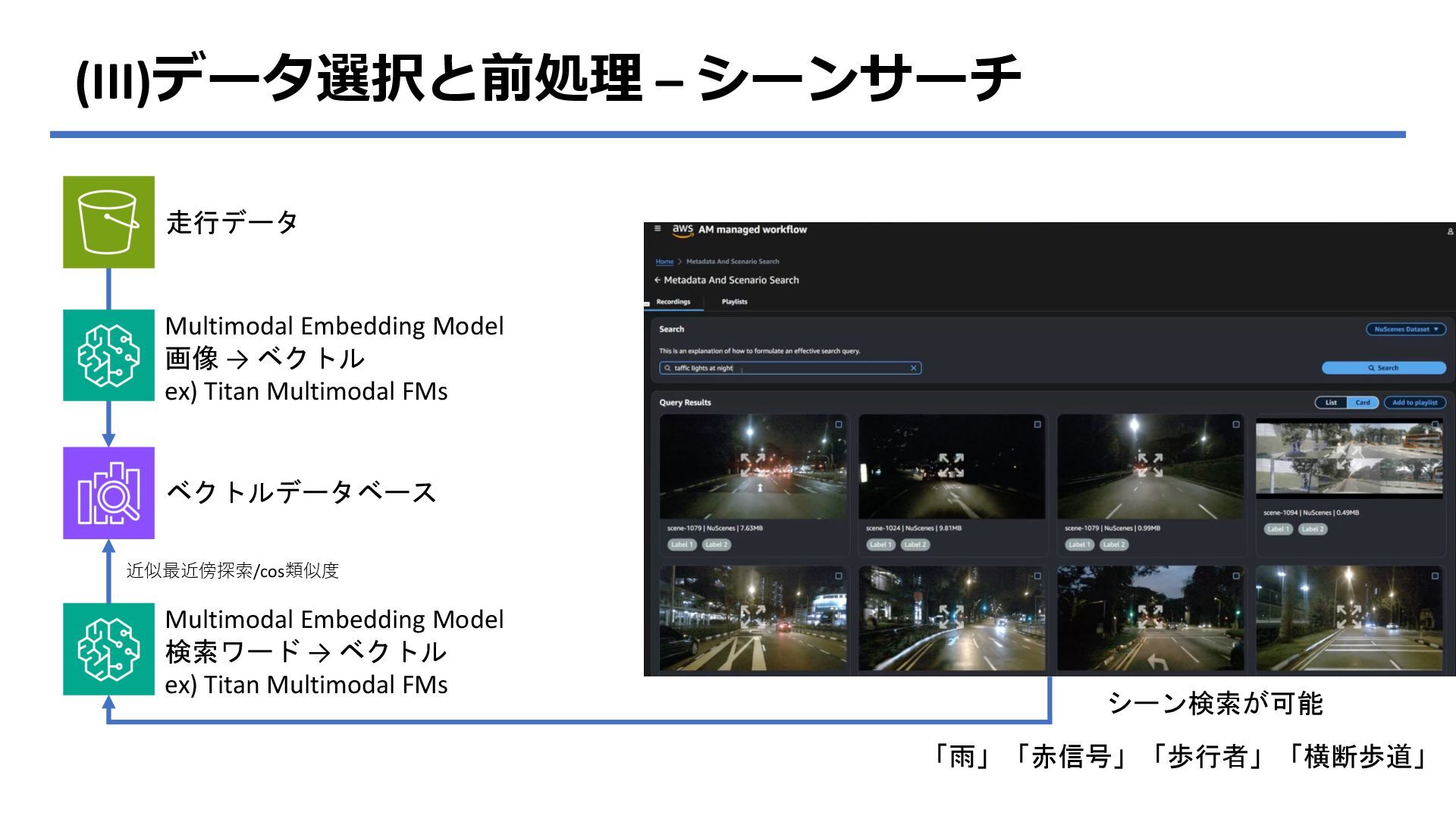
Big Data System, Data Mining, and Closed-Loop Technologies, https://arxiv.org/html/2401.12888v2 (I)データ収集 (II)データ保存 (III)データ選択と前処理 (IV)データラベリング (V)ADモデルトレーニング (VI)シミュレーション/テスト検証 (VII)実世界展開
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}