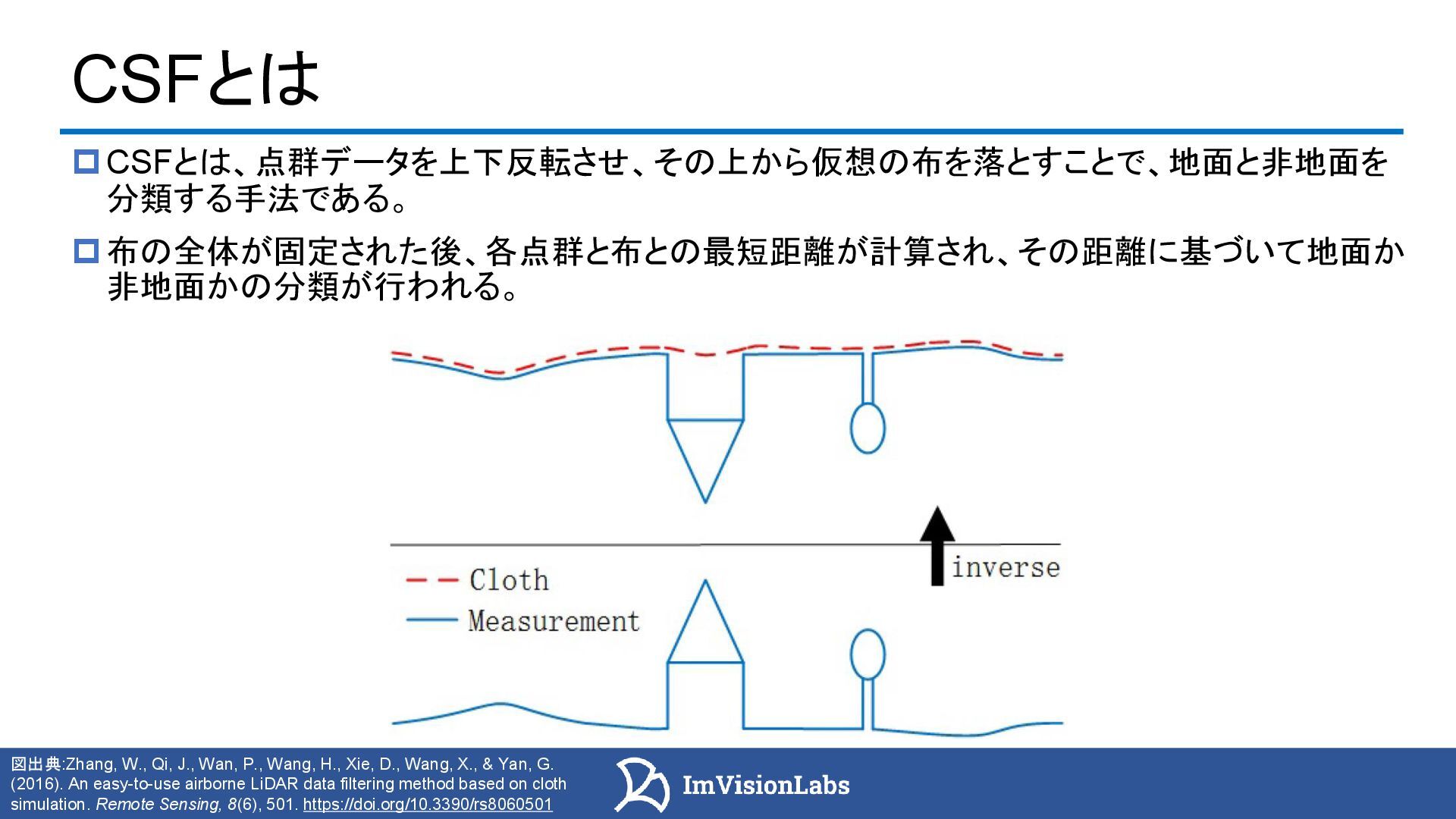
[動画] 図出典:Zhang, W., Qi, J., Wan, P., Wang, H., Xie, D., Wang, X., & Yan, G. (2016). An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sensing, 8(6), 501. https://doi.org/10.3390/rs8060501
Smooth Terrain(ST) True Grid resolution(GR) 1.0 Height threshold for Cloud-to-Cloth distance(ℎ𝑐𝑐) 以下の例によって異なる Maximum number of iterations 500 Duration of time(dT) 0.65 Height threshold for Cloth Post-processing(ℎ𝑐𝑝) 0.3 • 今回の分類は以下のようなパラメーター設定で行った
{kind=link}
![CSFとは バックパック型スキャナー iPhone12 LiDAR 3次元点群から地表面を抽出する方法の1つ 以下の図では、地表面が黄色、その他が青色で示されている [動画] データ出典:上図はToronto3Dデータセットを利用しています (https://github.com/WeikaiTan/Toronto-3D)](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_1.jpg){kind=link}
{kind=link}
![CSFの実行方法 iPhone12 LiDAR [動画] CloudCompareの他にPDALのfilters.csfやMATLABのFile Exchangeのコードを利用可能 CloudCompareにて Plugins](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_3.jpg){kind=link}
![CSFの実行方法 iPhone12 LiDAR [動画] 本スライドでは主に以下のコードを利用してCSFを実行 MATLAB版: https://jp.mathworks.com/matlabcentral/fileexchange/58139- csf-cloth-simulation-filter?s_tid=FX_rc3_behav](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_4.jpg){kind=link}
![パラメーターについて バックパック型スキャナー iPhone12 LiDAR CSFアルゴリズムにおける主要なパラメーターは、以下の表に示す通りである [動画] パラメータ デフォルト値 説明](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_5.jpg){kind=link}
![パラメーターについて バックパック型スキャナー iPhone12 LiDAR CSFアルゴリズムにおける主要なパラメーターは、以下の表に示す通りである [動画] パラメータ デフォルト値 説明](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_6.jpg){kind=link}
{kind=link}
![イテレーション内における物理挙動のイメージ バックパック型スキャナー iPhone12 LiDAR [動画] 以下のように上下を逆さまにした状態から布を落としていくイメージ 山 山 人工構造物](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_8.jpg){kind=link}
![イテレーション内における物理挙動のイメージ バックパック型スキャナー iPhone12 LiDAR [動画] 前スライドでは平面的なアニメーションを示したが、実際は以下の図のように、2次元のグリッ ドにてシミュレーションを行う 布を落としていくイメージであるが、布は質量を持つ粒子とそれらをつなぐ接続からなるグリッ](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_9.jpg){kind=link}
![イテレーション内における物理挙動のイメージ バックパック型スキャナー iPhone12 LiDAR [動画] 以下の図はCloudCompareにてCSFを実行し、布をメッシュモデルとしてエキスポートした様 この緑のメッシュを基準面として十分近い点を地表面であると分類する](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_10.jpg){kind=link}
![イテレーション内における物理挙動のイメージ iPhone12 LiDAR [動画] 布の粒子の間隔をCloth Resolutionにて定義する CloudCompareにおいてはAdvanced Settingにて変更可能](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_11.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー iPhone12 LiDAR [動画] ①重力落下 • 接触判定されていない点に対してのみ適用される • 以下の式に基づいて落下する](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_12.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー [動画] 重力落下の式の導出 現在位置 X (t)の、時刻 t に対するテイラー展開は以下のように表すことができる。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_13.jpg){kind=link}
![イテレーション内における物理挙動 iPhone12 LiDAR [動画] 重力落下の式の導出 この時刻 tに対するテイラー展開から、3次以上の高次項を無視して整理すると以下のようになる。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_14.jpg){kind=link}
![イテレーション内における物理挙動 iPhone12 LiDAR [動画] 重力落下の式の導出 両辺を加算して 整理して](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_15.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー iPhone12 LiDAR [動画] 重力落下の式の導出 ሷ X (t)](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_16.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー [動画] ②点の接触判定 • 布上の点が点群と接触判定された場合、その点はそれ以降動かない • 接触判定の条件は以下の式で表される 図出典:CSFの論文のFigure6を引用しています 水色:](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_17.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー [動画] ②点の接触判定 • 布上の点が点群と接触判定された場合、その点はそれ以降動かない • 接触判定の条件は以下の式で表される 図出典:CSFの論文のFigure6を引用しています 赤色:](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_18.jpg){kind=link}
![イテレーション内における物理挙動 iPhone12 LiDAR [動画] ②点の接触判定 • 布上の点が点群と接触判定された場合、その点はそれ以降動かない • 接触判定の条件は以下の式で表される 落下している点の高さを](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_19.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー iPhone12 LiDAR [動画] ③剛性による調整 重力落下、点の接触判定が終わると、布を構成する各点は剛性による調整が行われる。 調整をする点をp 0 、隣接する点を](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_20.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー iPhone12 LiDAR [動画] ③剛性による調整 • この変位処理は、布の剛性を表すパラメータ RIの値に応じて複数回繰り返さ れる。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_21.jpg){kind=link}
![イテレーション内における物理挙動 バックパック型スキャナー iPhone12 LiDAR [動画] • CSFの論文では以下の図にて説明されている(Figure5) 図出典:CSFの論文のFigure5を引用しています](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_22.jpg){kind=link}
![イテレーション内における物理挙動 iPhone12 LiDAR [動画] • 以下の式についての補足 • nは垂直成分の (0,0,1)であるため、2つの隣り合う粒子の位置ベクトルの差と の内積を利用することでz成分の値のみを取り出すことができる](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_23.jpg){kind=link}
![イテレーション内における物理挙動 [動画] • これまでのスライドでのルールに従い、回数(イテレーション)を増やしていくこ とで、次第に布が地表面へフィットする • 以降のスライドにて、その様子をアニメーションにて示す • イテレーションについてはCloudCompareにおいてはAdvanced Settingにて変更可能](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_24.jpg){kind=link}
![イテレーション100での布の落下過程 [a] ScanX2.0](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_25.jpg){kind=link}
![イテレーション100での布の落下結果 [a] ScanX2.0 • 左右の2つのこぶが山であり、中央上部の点群が 建物である • 地面・非地面の区別が適切に行われていた](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_26.jpg){kind=link}
![イテレーション80での布の落下過程 [a] ScanX2.0](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_27.jpg){kind=link}
![イテレーション80での布の落下結果 [a] ScanX2.0 • イテレーションが80だと、布が十分に落ちるのに 時間が足りなかった • そのため、地面の多くが非地面に区別されていた](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_28.jpg){kind=link}
![イテレーション120での布の落下過程 [a] ScanX2.0](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_29.jpg){kind=link}
![イテレーション120での布の落下結果 [a] ScanX2.0 • イテレーションが120だと、布が地形に沈みすぎて いた • そのため、建物の多くが地面に区別されていた](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_30.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 後処理による点の位置調整 • この補正処理は、パラメータSmooth TerrainがTrueに設定されている場合に適用される。 • 特に、崖や急傾斜では、布が地表面に接触せず、非地面と誤判定されることがある。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_31.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 後処理による点の位置調整 ①まだ接地していない点Aに対して、その4つの近傍点に接地済みの点Bが存在する かを確認する。点が見つからなければ調整は行われない。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_32.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 後処理による点の位置調整 ②見つかった点Bと、点Aに対して、それぞれの直下の地形点を取得する。 ここで、点Aの直下の地形点を点Cとし、点Bの直下の地形点を点Dとする。 点Cと点Dの高さの差がℎ𝑐𝑝 の固定値である0.3mより小さい場合に処理は進 む。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_33.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 後処理による点の位置調整 ③点Aの高さを調整し、点Cの高さと同じにする。この補正により、未接地点だった点A は接地済の点となる。その結果、地面として正しく分類されやすくなる。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_34.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 後処理の伝搬について • 補正されて接地した点に隣接する未接地点へ補正が伝搬する。 • 接地済の点に隣接する未接地点群をSCC(強連結成分)とし、BFS(幅優先探索)に より外縁から内側へ順に補正を伝搬させる](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_35.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 点の地面・非地面の判定 • 点の接地・未接地の判定は以下の式によって行われる](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_36.jpg){kind=link}
![地面・非地面の判定について [a] ScanX2.0 hcc についてはCloudCompareにおいてはAdvanced Settingにて変更可能 ※hcc についての和訳: 分類しきい値(Classification](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_37.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 パラメーター設定について パラメータ 値 Rigidity Index(RI) 3.0(例2のみ1.0)](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_38.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 例1:hcc =0.5の場合 • 一般的な場合の結果で、 正しく分類されていた](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_39.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 例2:hcc=0.9,RI=1の場合 • 剛性が小さく、地面と判定される閾 値が大きいため、本来なら地面が多 くなるはずである。 •](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_40.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 例3:hcc=0.1の場合 • 地面と判定する閾値を0.1と小さく設 定したことで、布との距離が0.1m以 内の点しか地面と判定されなくなる。 •](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_41.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 極端な例1:hcc =0の場合 • 閾値を極端に小さく(たとえば0m)設 定すると、布との距離が完全に0で なければ地面と判定されない。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_42.jpg){kind=link}
![CSF適用後の地面分類例 [a] ScanX2.0 極端な例2:hcc =9の場合 • 閾値を9mと大きく設定することで、 布から大きく離れた点でも地面とみ なされる可能性が高くなる。](https://files.speakerdeck.com/presentations/e5e74230468e4b5db51828daa6f404ba/slide_43.jpg){kind=link}