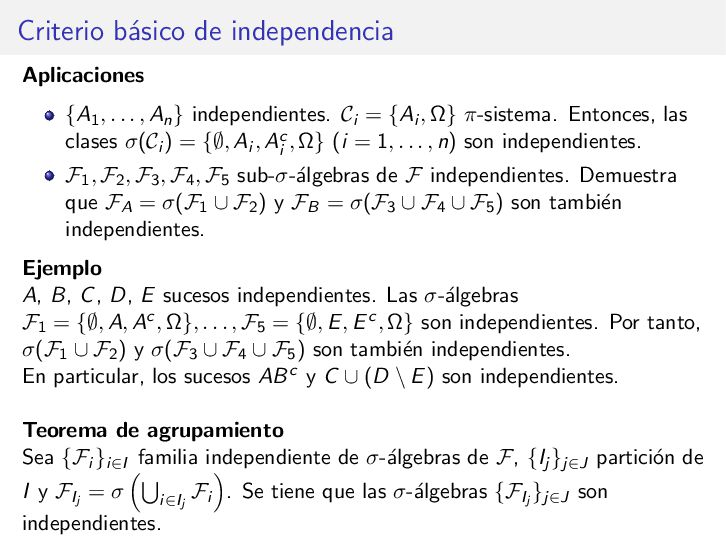
, An} independientes. Ci = {Ai , Ω} π-sistema. Entonces, las clases σ(Ci ) = {∅, Ai , Ac i , Ω} (i = 1, . . . , n) son independientes. F1, F2, F3, F4, F5 sub-σ-´ algebras de F independientes. Demuestra que FA = σ(F1 ∪ F2) y FB = σ(F3 ∪ F4 ∪ F5) son tambi´ en independientes. Ejemplo A, B, C, D, E sucesos independientes. Las σ-´ algebras F1 = {∅, A, Ac, Ω}, . . . , F5 = {∅, E, Ec, Ω} son independientes. Por tanto, σ(F1 ∪ F2) y σ(F3 ∪ F4 ∪ F5) son tambi´ en independientes. En particular, los sucesos ABc y C ∪ (D \ E) son independientes. Teorema de agrupamiento Sea {Fi }i∈I familia independiente de σ-´ algebras de F, {Ij }j∈J partici´ on de I y FIj = σ i∈Ij Fi . Se tiene que las σ-´ algebras {FIj }j∈J son independientes.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}