CVPR 2025で発表が予定されている"Blurred LiDAR for Sharper 3D: Robust Handheld 3D Scanning with Diffuse LiDAR and RGB"の論文の内容をまとめたスライドです。
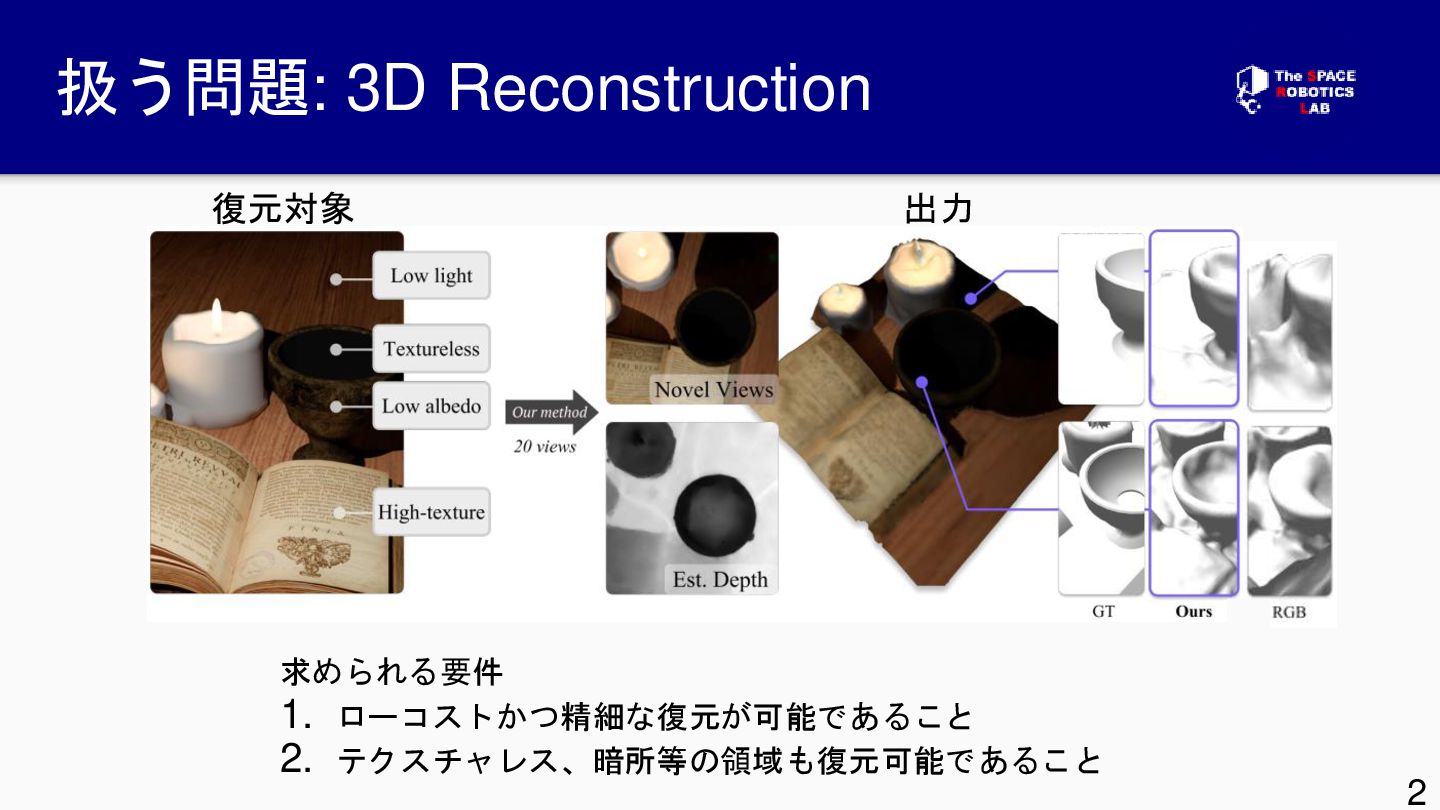
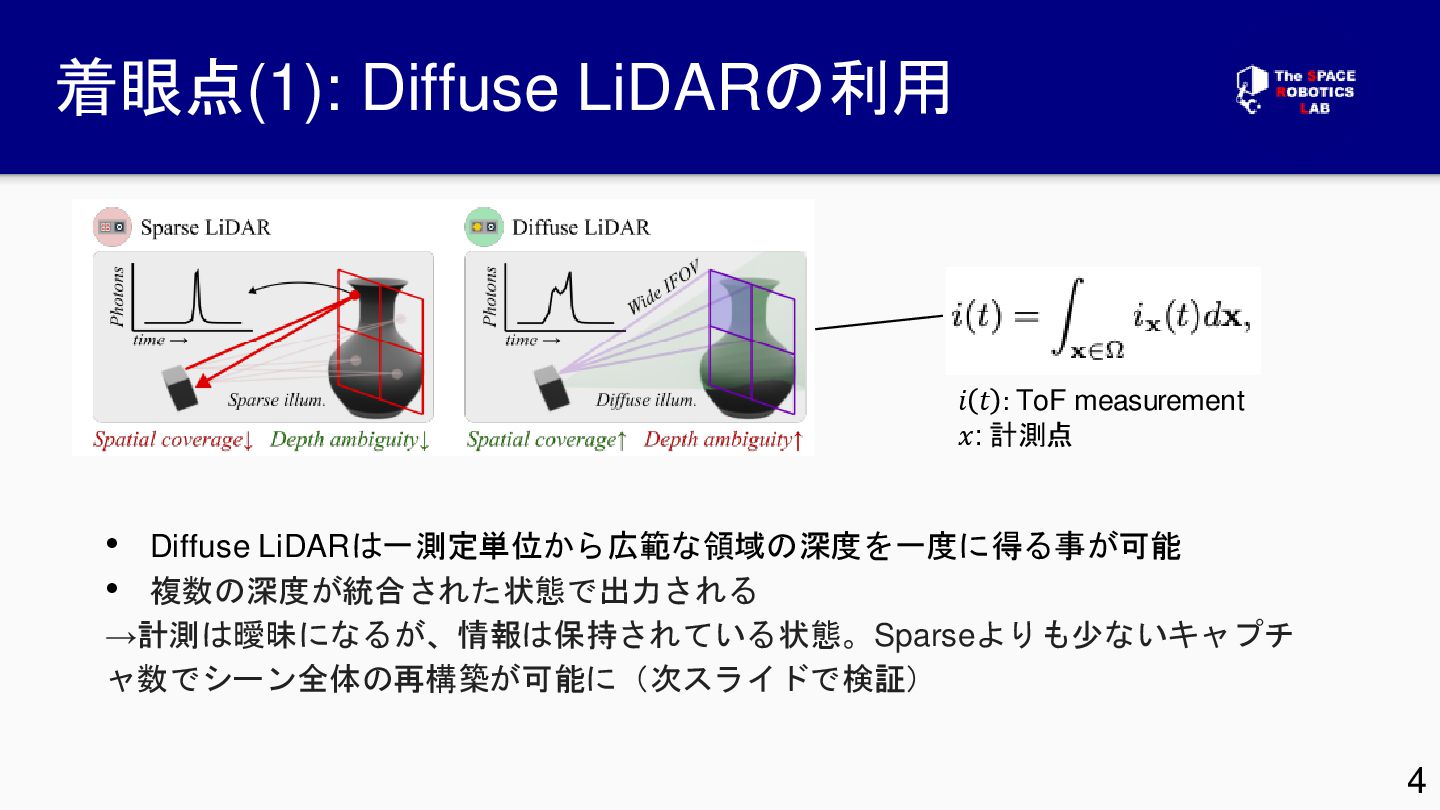
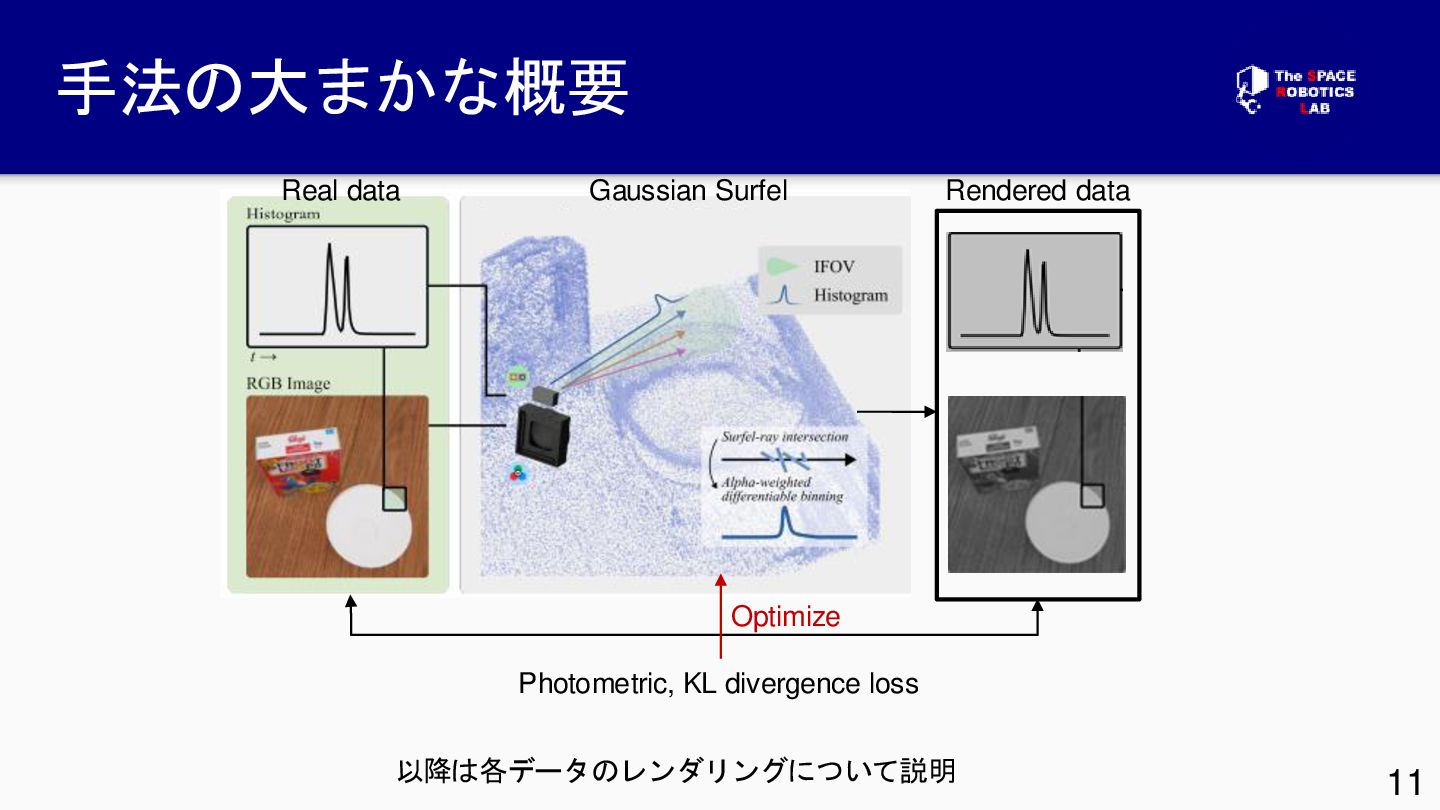
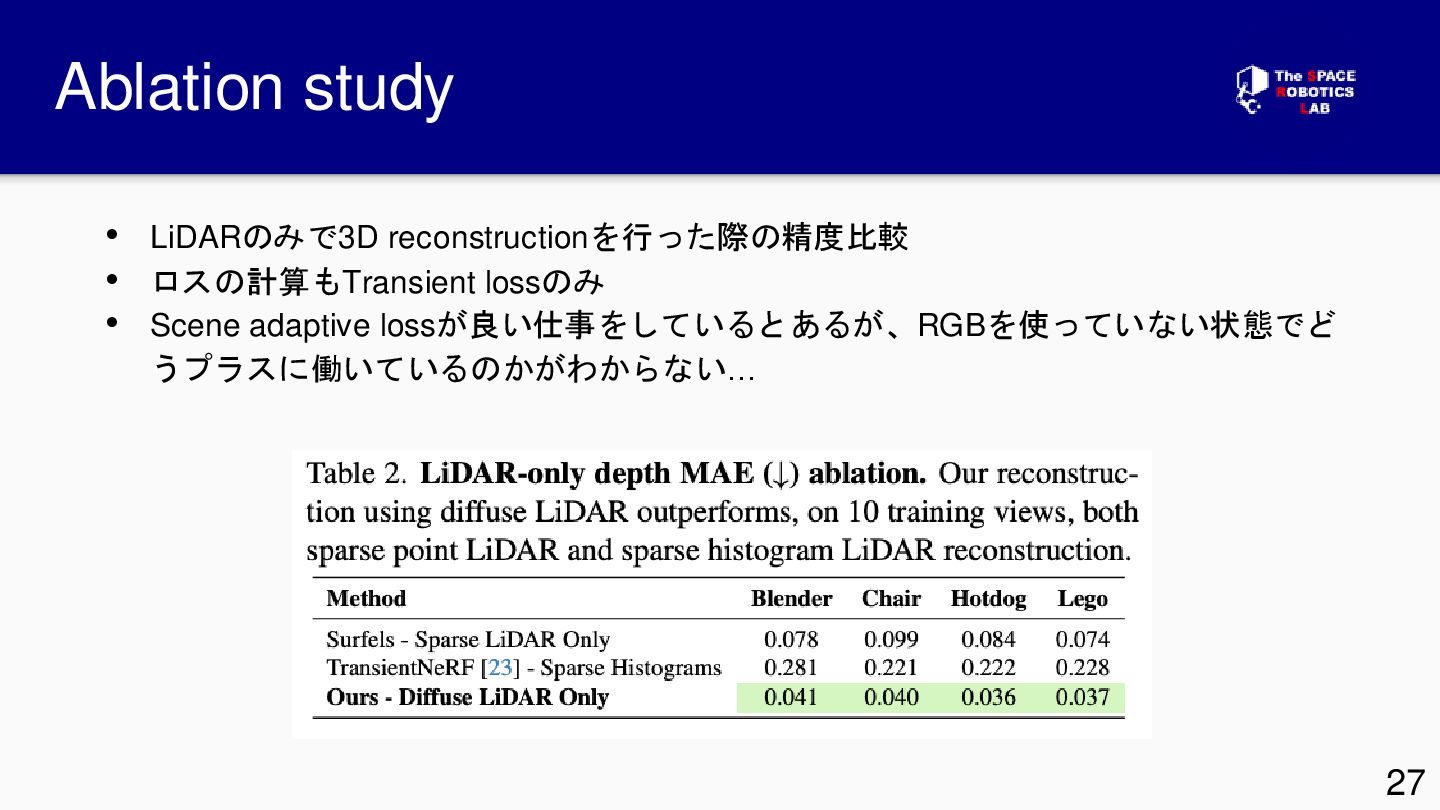
- 低精度かつ広範な領域の深度を得るDiffuse LiDARを用いて、カバレッジ性の高い3D reconstruction手法を提案
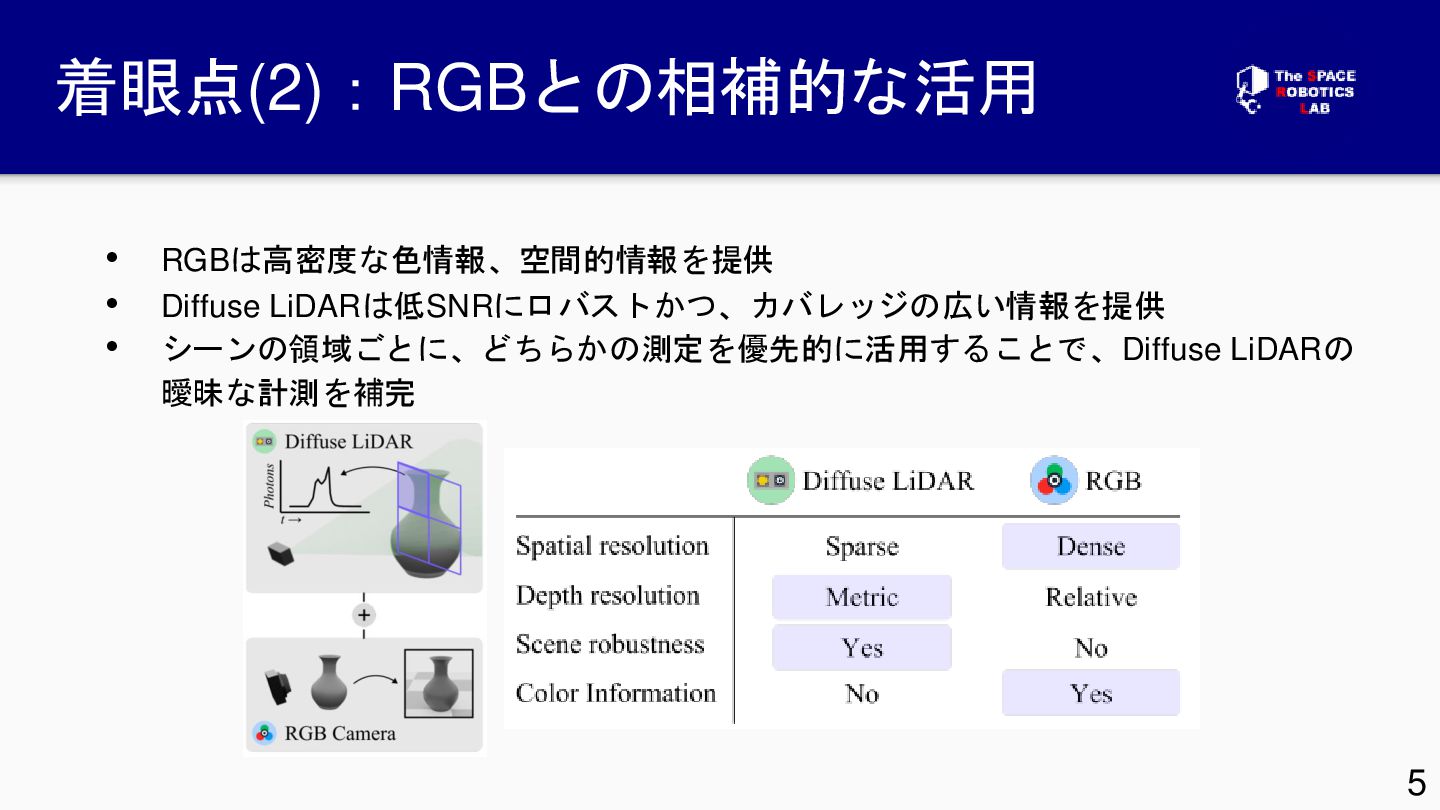
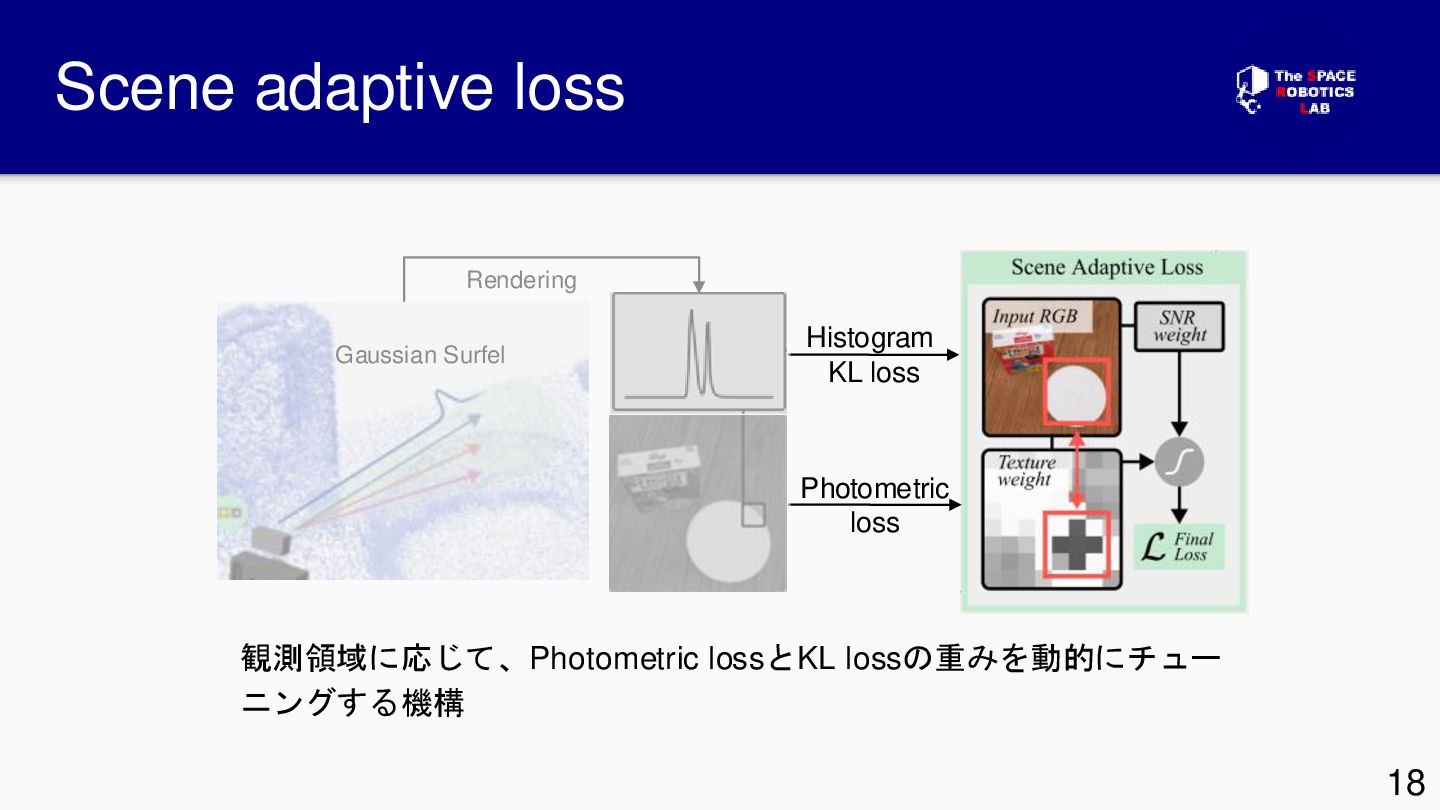
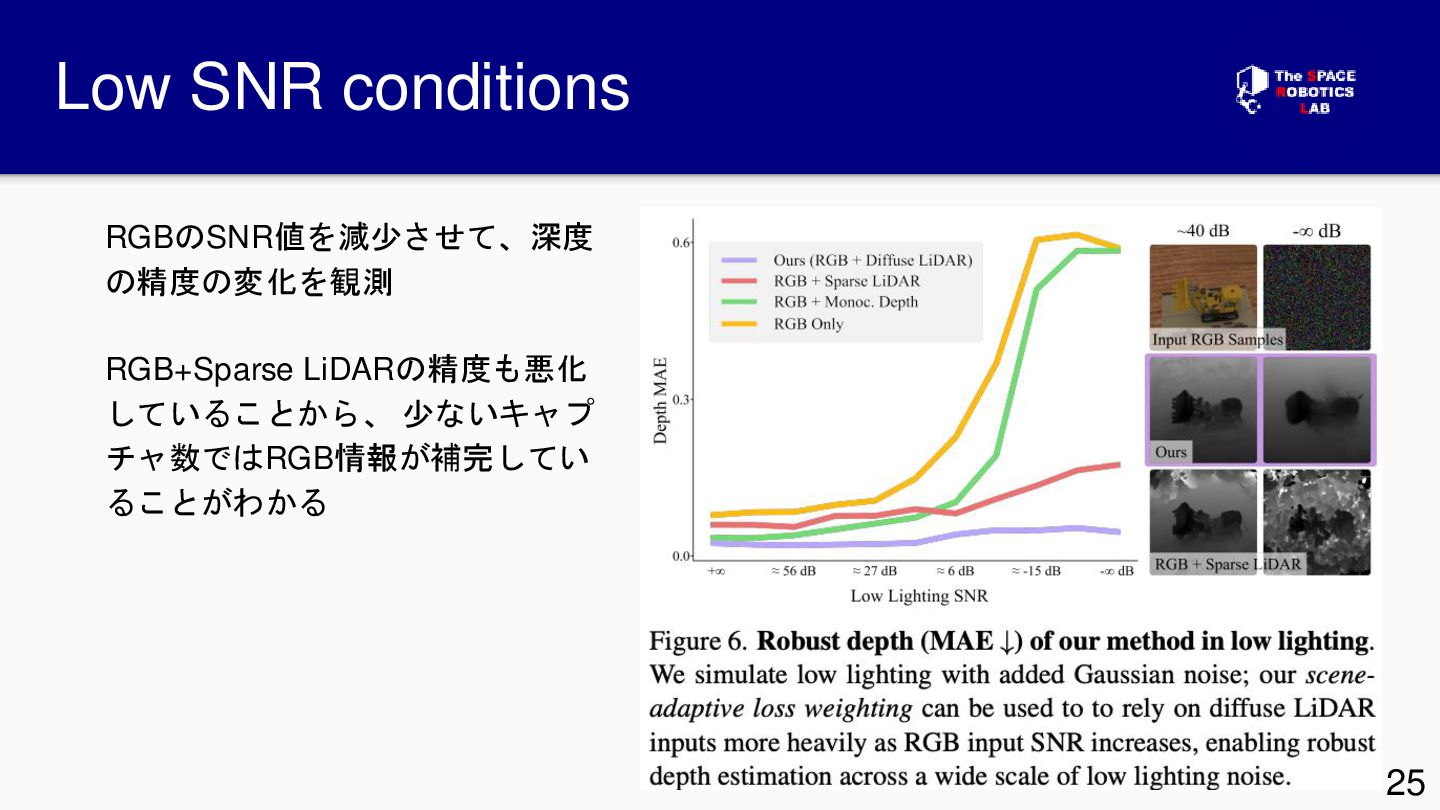
- シーンの特性に合わせてDiffuse LiDARとRGBの重み付けを動的に行うことで、低SNR領域でも精細な再構築が可能
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}