Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[Journal club] Flow as the Cross-Domain Manipul...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
April 09, 2026
Technology
96
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[Journal club] Flow as the Cross-Domain Manipulation Interface
Semantic Machine Intelligence Lab., Keio Univ.
PRO
April 09, 2026
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
72
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
77
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
[Journal club] Improved Mean Flows: On the Challenges of Fastforward Generative Models
keio_smilab
PRO
0
200
Other Decks in Technology
See All in Technology
マルチアカウント環境でSecurity Hubの運用、その後どうなった? / SRE NEXT 2026 miniLT会
genda
0
100
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
780
Devsumi 2026 Summer 人もAIも使える共通基盤を事業の加速装置にする~デザインシステム運用に学ぶ組織レバレッジ~ 渡辺 凌央
legalontechnologies
PRO
1
230
穢れた技術選定について
watany
17
5.5k
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
480
SRE Next 2026 何でも屋からの脱却
bto
0
930
End-to-Endで考える信頼性 — LINEアプリにおける クライアント開発×SRE連携の実践
maruloop
4
4.5k
ゴールデンパスは敷いただけでは道にならない ─ 企画部門のエンジニアが技術標準を事業価値に変えるまで
mhrtech
1
210
知らん間に、回ってる
ming_ayami
0
720
カードゲーム作りが教えてくれた プロダクトオーナーシップ
moritamasami
0
110
CSに"SLO"は要らない、経営層に"99.9%"は伝わらない - SREを全社に"翻訳"する3原則
cscengineer
PRO
1
5k
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
140
Featured
See All Featured
Building Adaptive Systems
keathley
44
3.1k
How to Think Like a Performance Engineer
csswizardry
28
2.7k
The untapped power of vector embeddings
frankvandijk
2
1.8k
Faster Mobile Websites
deanohume
310
32k
職位にかかわらず全員がリーダーシップを発揮するチーム作り / Building a team where everyone can demonstrate leadership regardless of position
madoxten
63
55k
The Limits of Empathy - UXLibs8
cassininazir
1
500
Designing Powerful Visuals for Engaging Learning
tmiket
1
450
世界の人気アプリ100個を分析して見えたペイウォール設計の心得
akihiro_kokubo
PRO
72
40k
How to Talk to Developers About Accessibility
jct
2
390
Building the Perfect Custom Keyboard
takai
2
810
Why You Should Never Use an ORM
jnunemaker
PRO
61
9.9k
技術選定の審美眼(2025年版) / Understanding the Spiral of Technologies 2025 edition
twada
PRO
118
120k
Transcript
Mengda Xu1,2,3 Zhenjia Xu1,2 Yinghao Xu1 Cheng Chi1,2 Gordon Wetzstein1
Manuela Veloso3,4 Shuran Song1,2 1Stanford University, 2Columbia University, 3J.P. Morgan AI Research, 4Carnegie Mellon University Flow as the Cross-Domain Manipulation Interface 2026 杉浦孔明研究室 小林菖太 Xu, Mengda., Xu, Zhenjia., Xu, Yinghao., Chi, Cheng., Wetzstein, Gordon., Veloso, Manuela., Song, Shuran. “Flow as the Cross-domain Manipulation Interface”. In 8th Conference of Robot Learning, 2024. CoRL24
概要 2 ▪ 背景 ▪ 実機でのデータ収集は高コスト 容易に収集可能なデータをロボット学習に使いたい ▪ 人間の動画&シミュレーションデータ ▪
提案手法:Im2Flow2Act ▪ object flow を媒介にした軌道生成フレームワーク エンボディメントや環境に依らない動作表現 ▪ 結果 ▪ ロボットの実機データを使用せずに物体操作可能 ▪ シミュレーション・実機実験においてベースラインを上回る
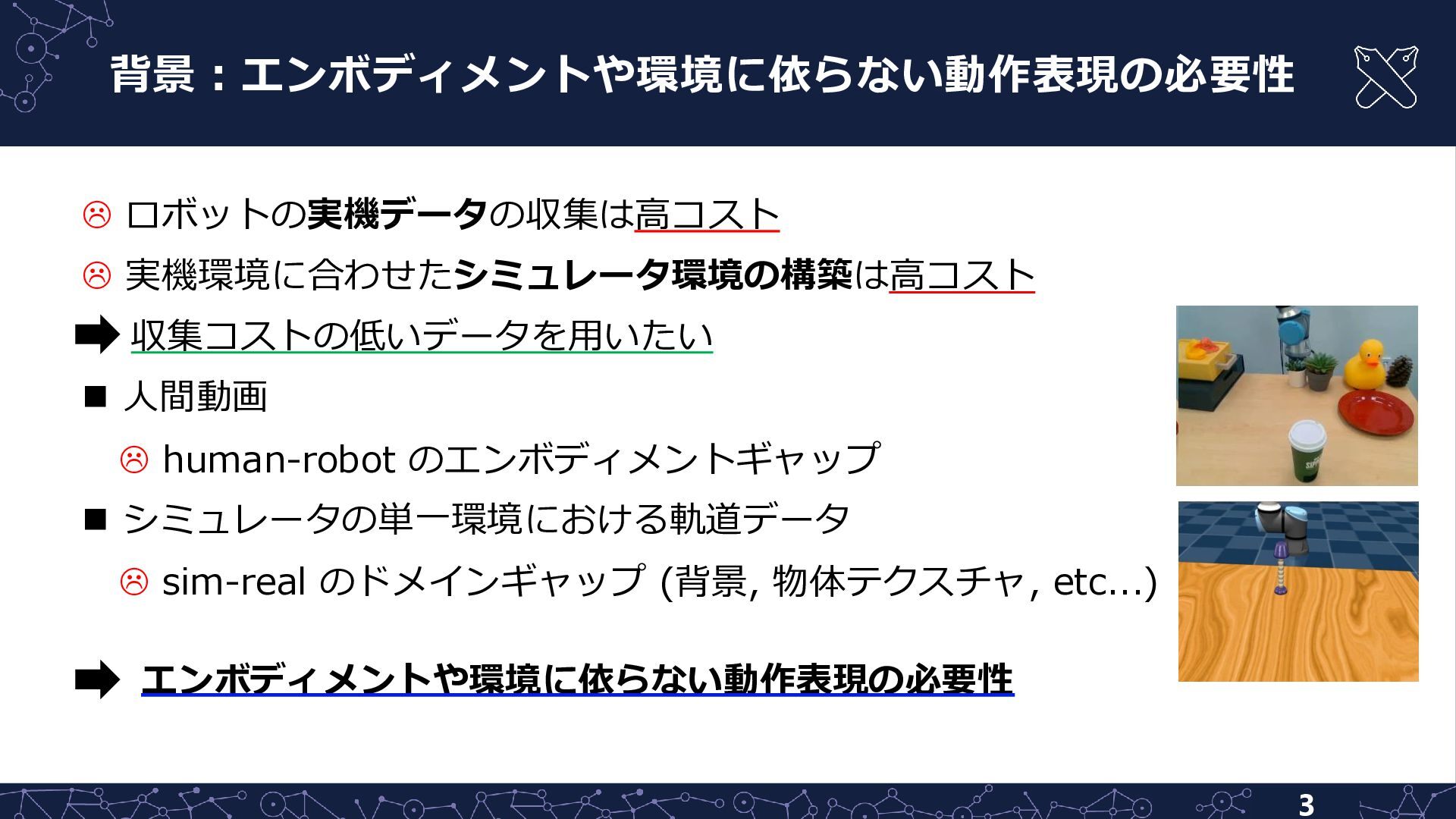
背景:エンボディメントや環境に依らない動作表現の必要性 3 ロボットの実機データの収集は高コスト 実機環境に合わせたシミュレータ環境の構築は高コスト 収集コストの低いデータを用いたい ◼ 人間動画
human-robot のエンボディメントギャップ ◼ シミュレータの単一環境における軌道データ sim-real のドメインギャップ (背景, 物体テクスチャ, etc...) エンボディメントや環境に依らない動作表現の必要性
関連研究: cross-domain data からのロボット学習 4 手法 特徴 VRB [Bahl+, CVPR23]
人間動画から物体の把持点と軌道を学習 PEAC [Ying+, NeurIPS24] Cross-embodiment data から latent action を学習 ATM [Wen+, RSS24] 人間動画から hand-centric なフローを学習 実機適用時に target embodiment でのデータ収集が必要 VRB [Bahl+, CVPR23] ATM [Wen+, RSS24]
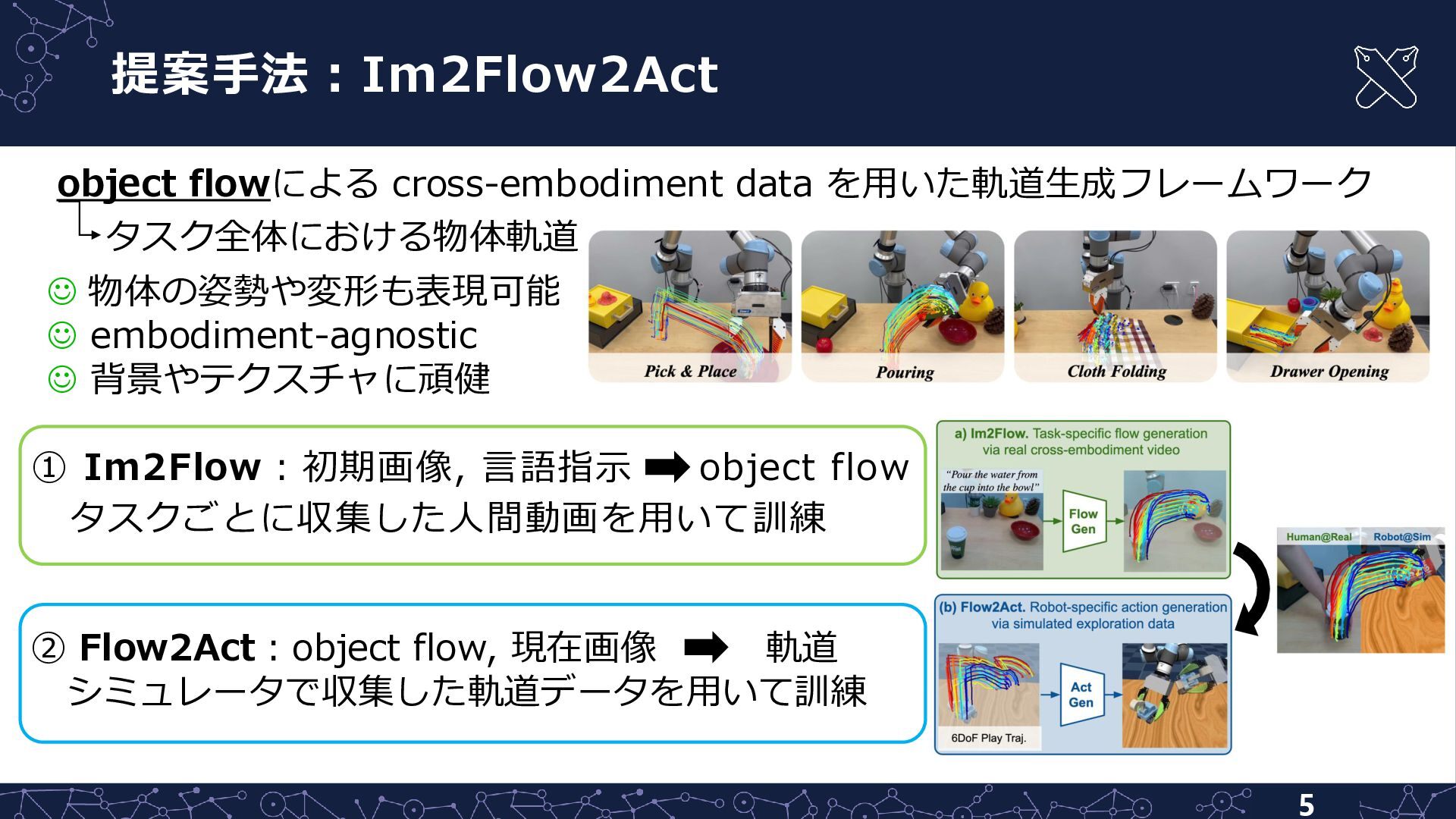
提案手法:Im2Flow2Act 5 ① Im2Flow:初期画像, 言語指示 object flow タスクごとに収集した人間動画を用いて訓練 object flowによる
cross-embodiment data を用いた軌道生成フレームワーク ☺ 物体の姿勢や変形も表現可能 ☺ embodiment-agnostic ☺ 背景やテクスチャに頑健 ② Flow2Act:object flow, 現在画像 軌道 シミュレータで収集した軌道データを用いて訓練 タスク全体における物体軌道
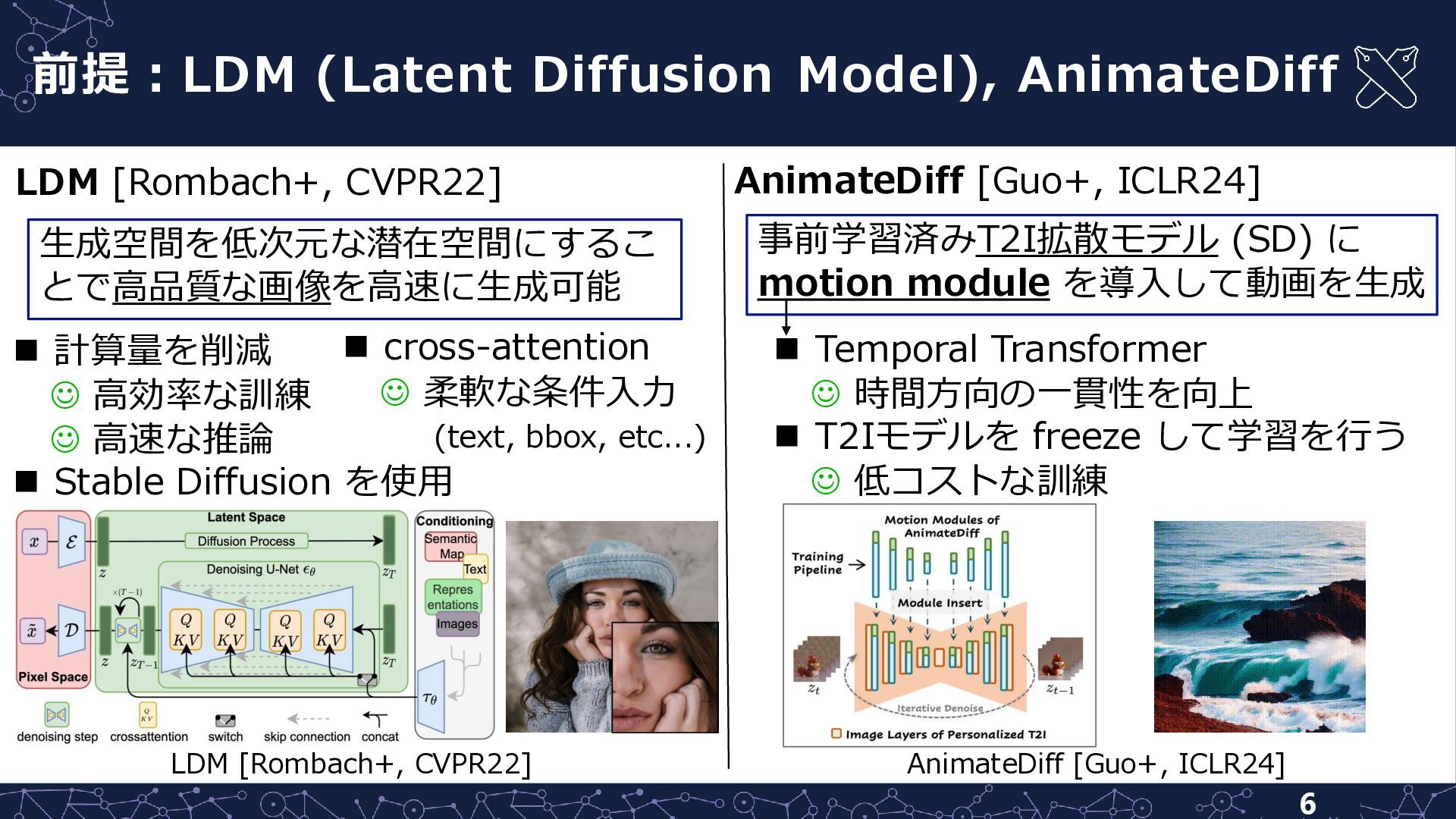
前提:LDM (Latent Diffusion Model), AnimateDiff 6 事前学習済みT2I拡散モデル (SD) に motion
module を導入して動画を生成 ◼ Temporal Transformer ☺ 時間方向の一貫性を向上 ◼ T2Iモデルを freeze して学習を行う ☺ 低コストな訓練 AnimateDiff [Guo+, ICLR24] LDM [Rombach+, CVPR22] 生成空間を低次元な潜在空間にするこ とで高品質な画像を高速に生成可能 ◼ cross-attention ☺ 柔軟な条件入力 (text, bbox, etc...) ◼ 計算量を削減 ☺ 高効率な訓練 ☺ 高速な推論 ◼ Stable Diffusion を使用 LDM [Rombach+, CVPR22] AnimateDiff [Guo+, ICLR24]
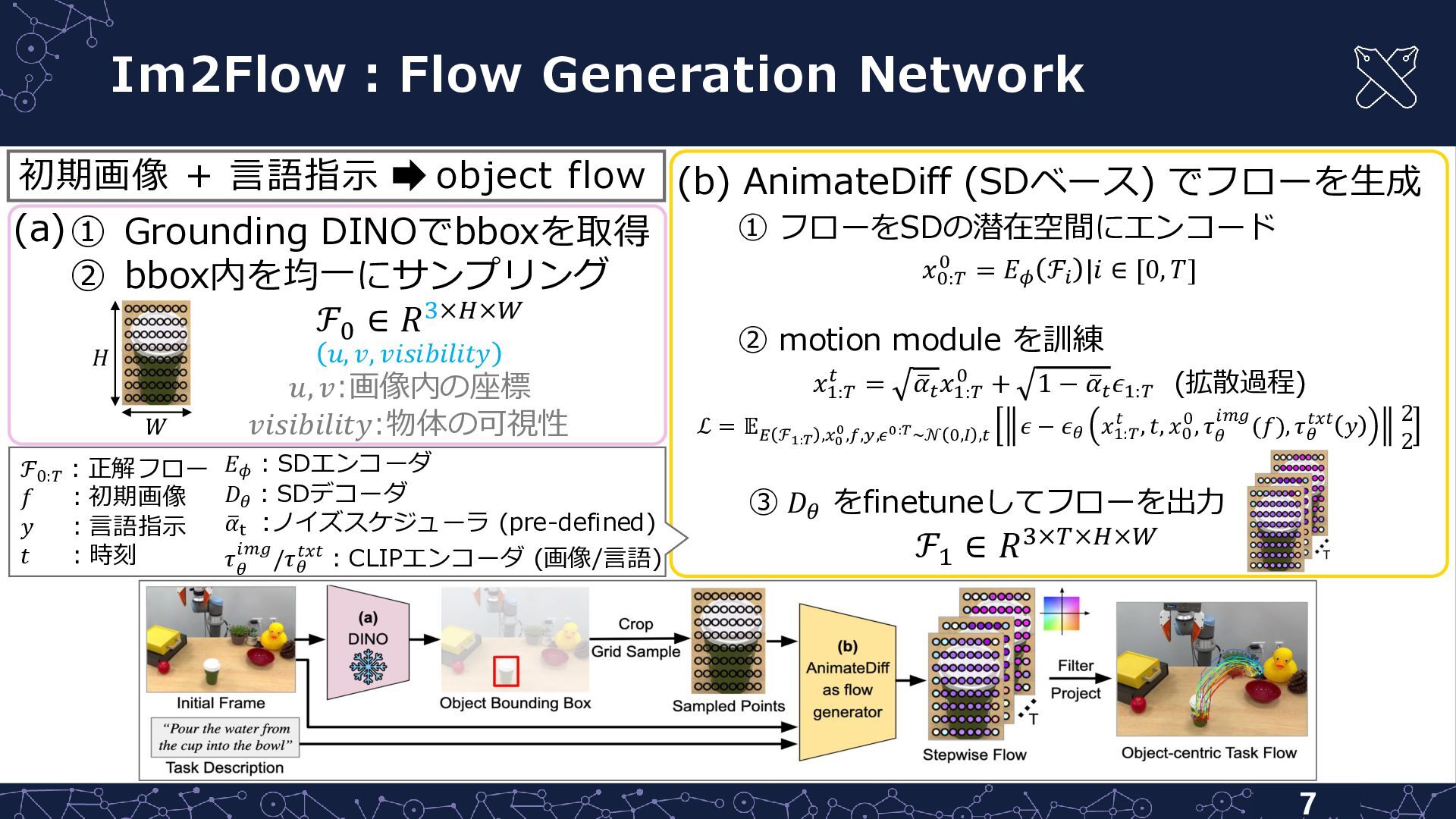
(b) AnimateDiff (SDベース) でフローを生成 ① フローをSDの潜在空間にエンコード 𝑥0:𝑇 0 = 𝐸𝜙
ℱ𝑖 |𝑖 ∈ [0, 𝑇] ② motion module を訓練 𝑥1:𝑇 𝑡 = ത 𝛼𝑡 𝑥1:𝑇 0 + 1 − ത 𝛼𝑡 𝜖1:𝑇 (拡散過程) ℒ = 𝔼 𝐸 ℱ1:𝑇 ,𝑥0 0,𝑓,𝑦,𝜖0:𝑇~𝒩 0,𝐼 ,𝑡 𝜖 − 𝜖𝜃 𝑥1:𝑇 𝑡 , 𝑡, 𝑥0 0, 𝜏 𝜃 𝑖𝑚𝑔(𝑓), 𝜏𝜃 𝑡𝑥𝑡 𝑦 2 2 ③ 𝐷𝜃 をfinetuneしてフローを出力 Im2Flow:Flow Generation Network 7 初期画像 + 言語指示 object flow ① Grounding DINOでbboxを取得 ② bbox内を均一にサンプリング ℱ0 ∈ 𝑅3×𝐻×𝑊 𝑢, 𝑣, 𝑣𝑖𝑠𝑖𝑏𝑖𝑙𝑖𝑡𝑦 𝑢, 𝑣:画像内の座標 𝑣𝑖𝑠𝑖𝑏𝑖𝑙𝑖𝑡𝑦:物体の可視性 (a) 𝐻 𝑊 ℱ1 ∈ 𝑅3×𝑇×𝐻×𝑊 ℱ0:𝑇 :正解フロー 𝑓 :初期画像 𝑦 :言語指示 𝑡 :時刻 𝐸𝜙 :SDエンコーダ 𝐷𝜃 :SDデコーダ ത 𝛼t :ノイズスケジューラ (pre-defined) 𝜏 𝜃 𝑖𝑚𝑔/𝜏𝜃 𝑡𝑥𝑡:CLIPエンコーダ (画像/言語)
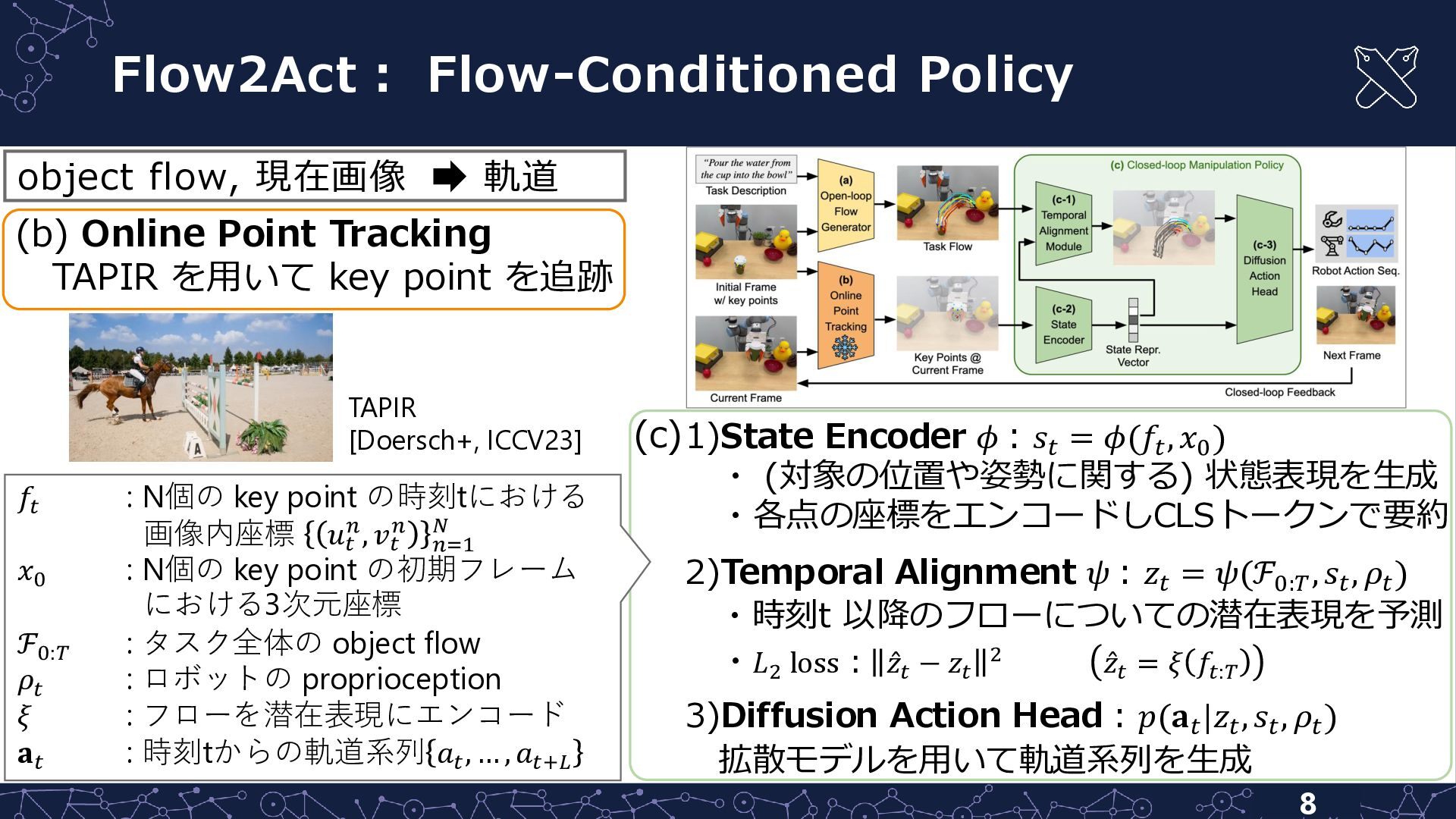
(c) 1)State Encoder 𝜙 : 𝑠𝑡 = 𝜙(𝑓𝑡 , 𝑥0
) ・ (対象の位置や姿勢に関する) 状態表現を生成 ・各点の座標をエンコードしCLSトークンで要約 2)Temporal Alignment 𝜓 : 𝑧𝑡 = 𝜓(ℱ0:𝑇 , 𝑠𝑡 , 𝜌𝑡 ) ・時刻t 以降のフローについての潜在表現を予測 ・𝐿2 loss: Ƹ 𝑧𝑡 − 𝑧𝑡 2 Ƹ 𝑧𝑡 = 𝜉 𝑓𝑡:𝑇 3)Diffusion Action Head : 𝑝(𝐚𝑡 |𝑧𝑡 , 𝑠𝑡 , 𝜌𝑡 ) 拡散モデルを用いて軌道系列を生成 Flow2Act: Flow-Conditioned Policy 8 𝑓𝑡 : N個の key point の時刻tにおける 画像内座標 𝑢𝑡 𝑛, 𝑣𝑡 𝑛 𝑛=1 𝑁 𝑥0 : N個の key point の初期フレーム における3次元座標 ℱ0:𝑇 : タスク全体の object flow 𝜌𝑡 : ロボットの proprioception 𝜉 : フローを潜在表現にエンコード 𝐚𝑡 : 時刻tからの軌道系列 𝑎𝑡 , … , 𝑎𝑡+𝐿 (b) Online Point Tracking TAPIR を用いて key point を追跡 TAPIR [Doersch+, ICCV23] object flow, 現在画像 軌道
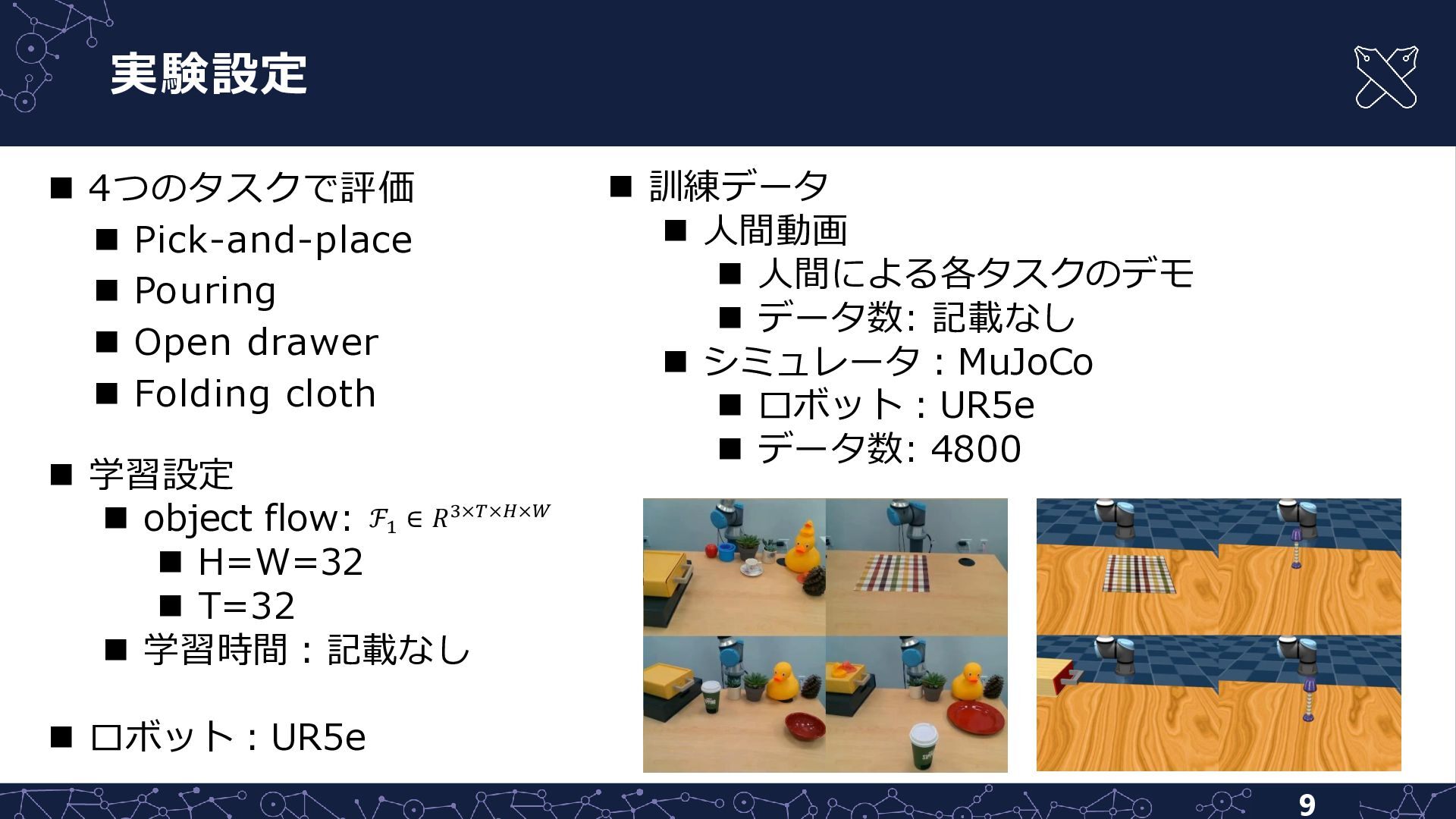
実験設定 9 ◼ 4つのタスクで評価 ◼ Pick-and-place ◼ Pouring ◼ Open
drawer ◼ Folding cloth ◼ 学習設定 ◼ object flow: ◼ H=W=32 ◼ T=32 ◼ 学習時間:記載なし ◼ ロボット:UR5e ℱ1 ∈ 𝑅3×𝑇×𝐻×𝑊 ◼ 訓練データ ◼ 人間動画 ◼ 人間による各タスクのデモ ◼ データ数: 記載なし ◼ シミュレータ:MuJoCo ◼ ロボット:UR5e ◼ データ数: 4800
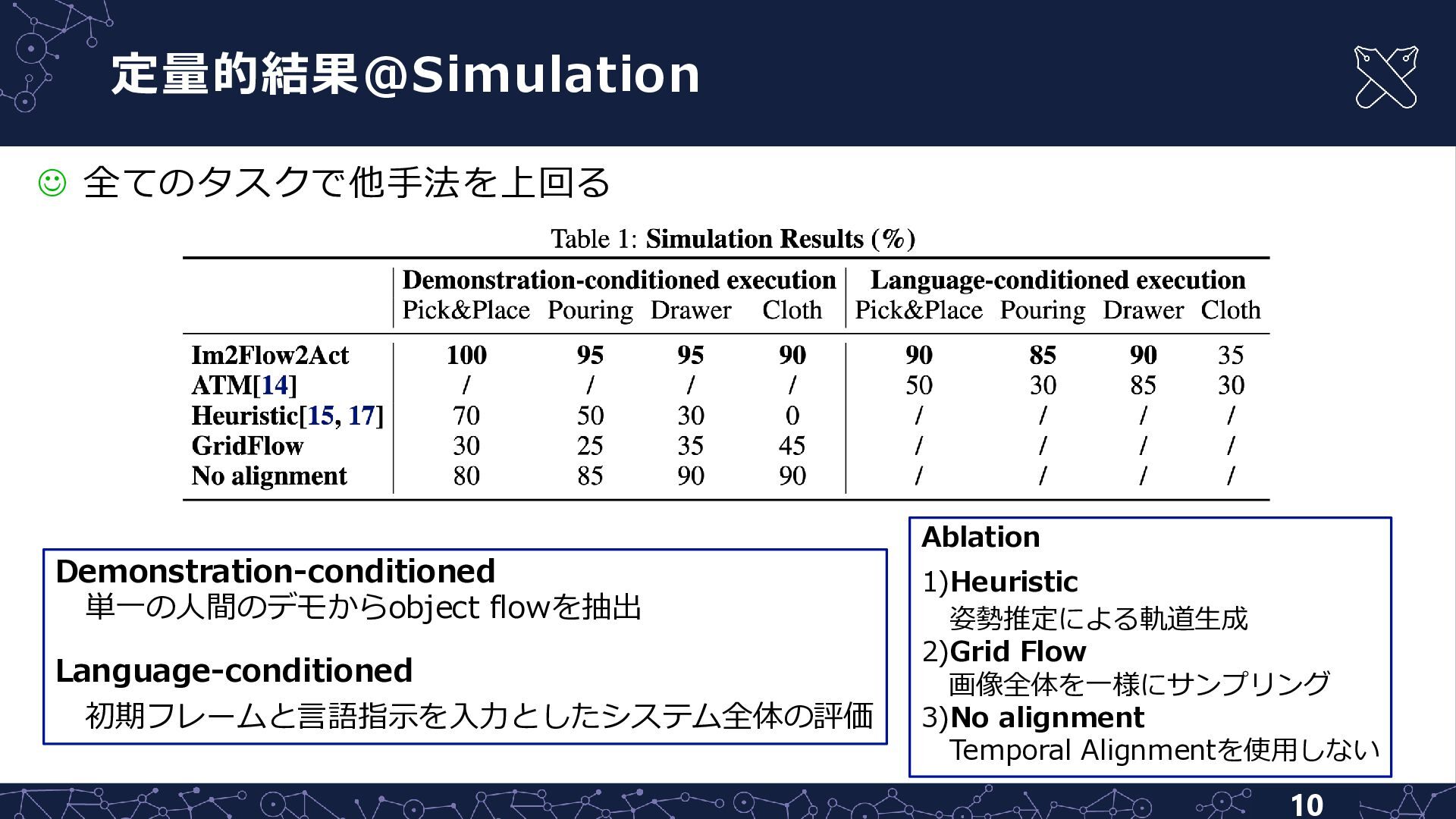
定量的結果@Simulation 10 ☺ 全てのタスクで他手法を上回る Demonstration-conditioned 単一の人間のデモからobject flowを抽出 Language-conditioned 初期フレームと言語指示を入力としたシステム全体の評価 Ablation
1)Heuristic 姿勢推定による軌道生成 2)Grid Flow 画像全体を一様にサンプリング 3)No alignment Temporal Alignmentを使用しない
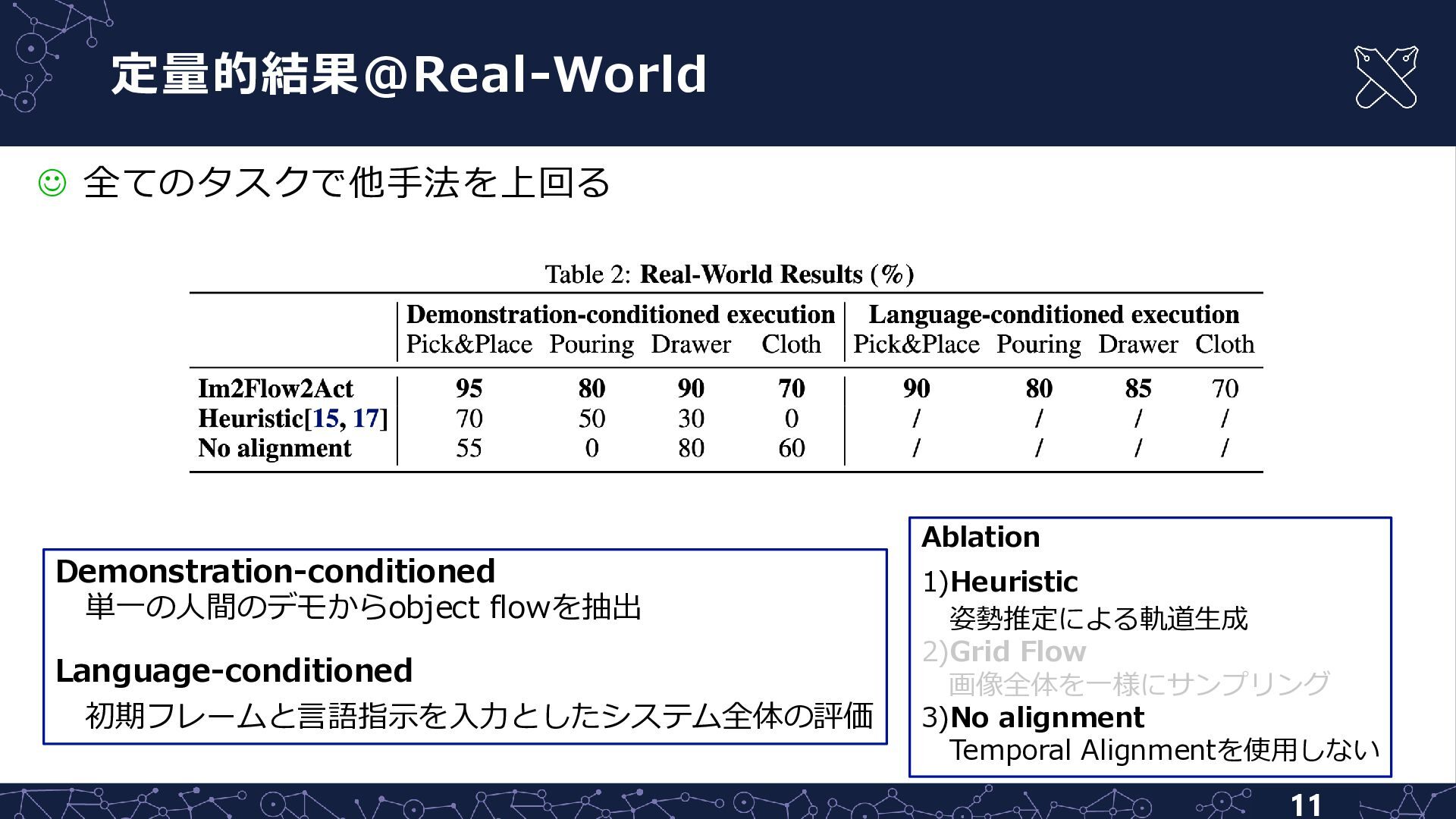
定量的結果@Real-World 11 ☺ 全てのタスクで他手法を上回る Demonstration-conditioned 単一の人間のデモからobject flowを抽出 Language-conditioned 初期フレームと言語指示を入力としたシステム全体の評価 Ablation
1)Heuristic 姿勢推定による軌道生成 2)Grid Flow 画像全体を一様にサンプリング 3)No alignment Temporal Alignmentを使用しない
定性的結果 12 ☺ object flow が物体の軌道を適切に表現
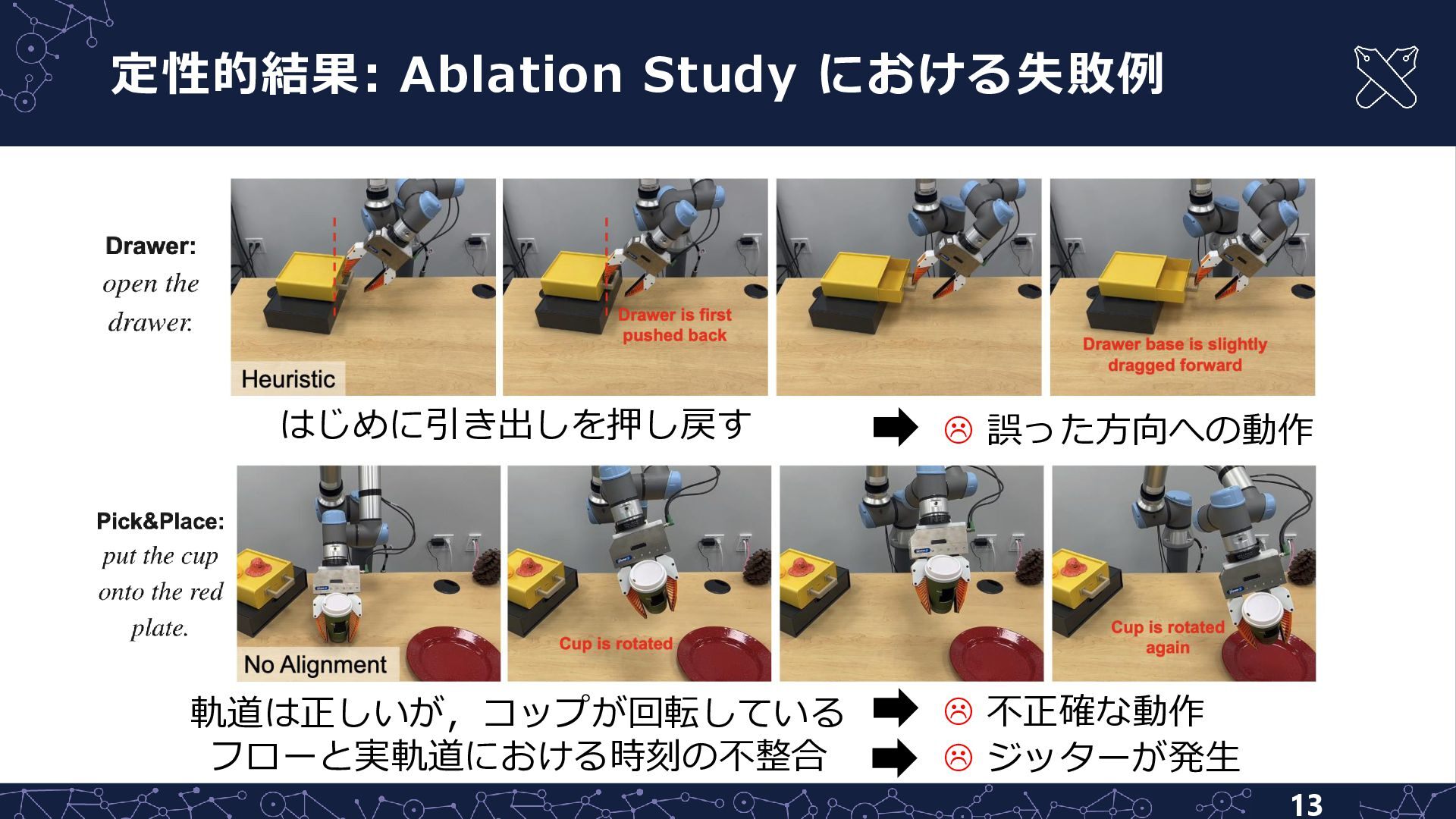
定性的結果: Ablation Study における失敗例 13 はじめに引き出しを押し戻す 軌道は正しいが,コップが回転している フローと実軌道における時刻の不整合 不正確な動作
誤った方向への動作 ジッターが発生
まとめ 14 ▪ 背景 ▪ 実機でのデータ収集は高コスト 容易に収集可能なデータをロボット学習に使いたい ▪ 人間の動画&シミュレーションデータ ▪
提案手法:Im2Flow2Act ▪ object flow を媒介にした軌道生成フレームワーク エンボディメントや環境に依らない動作表現 ▪ 結果 ▪ ロボットの実機データを使用せずに物体操作可能 ▪ シミュレーション・実機実験においてベースラインを上回る
{kind=link}
{kind=link}
{kind=link}
![関連研究: cross-domain data からのロボット学習 4 手法 特徴 VRB [Bahl+, CVPR23]](https://files.speakerdeck.com/presentations/6aa886495d5e41a8b481c2f11d327455/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}