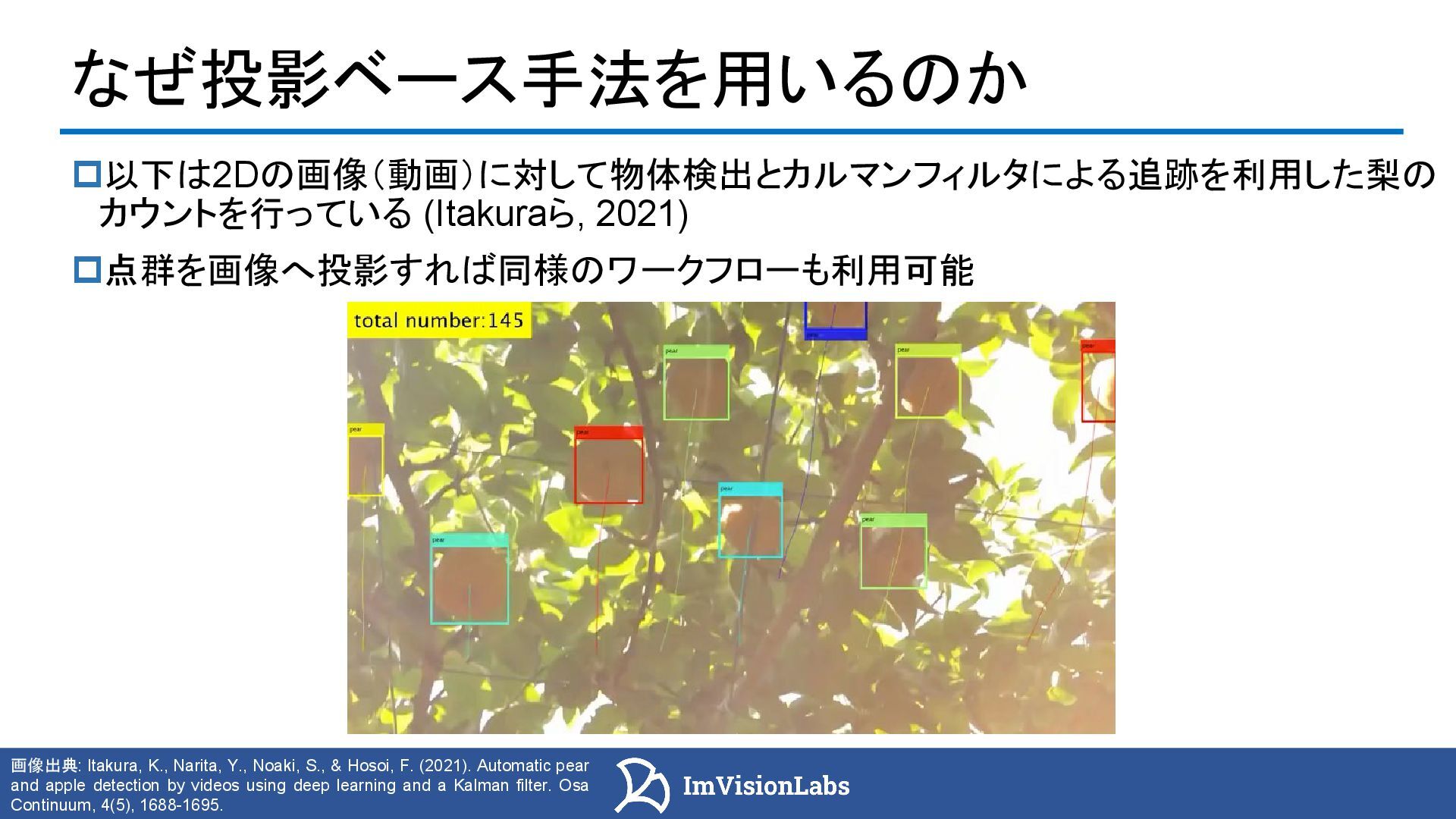
Y., Noaki, S., & Hosoi, F. (2021). Automatic pear and apple detection by videos using deep learning and a Kalman filter. Osa Continuum, 4(5), 1688-1695.
投影を活用することで、高精度に樹木の点群のみを抽出することができた事例 画像出典: Kenta Itakura and Fumiki Hosoi. (2019). Automated tree detection from 3D lidar images using image processing and machine learning. Applied Optics, 58, 3807-3811.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![投影型セグメンテーションのワークフロー(処理の流れ) 1. 点群を正射影により 2D平面に投影 2次元画像に投影 画像化 [i] [ii] 深層学習モデルによる分類 [iii]](https://files.speakerdeck.com/presentations/d23819399a864d59860b46e61879b51f/slide_5.jpg){kind=link}
{kind=link}
{kind=link}