Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
動くプログラミング
Search
Naoki Kato
PRO
July 18, 2023
Education
110
0
Share
動くプログラミング
東京学芸大学教育学部共通SE科目
小学校におけるプログラミング教育
数でプログラミング教育
2023/5/30更新
Naoki Kato
PRO
July 18, 2023
More Decks by Naoki Kato
See All by Naoki Kato
学習者用デジタル教科書の活用
naokikato
PRO
0
47
子どもが自立した学習者となるデジタルの活用について
naokikato
PRO
0
210
高校におけるプログラミング教育を考える
naokikato
PRO
0
210
デジタル教科書研究の今
naokikato
PRO
0
46
デジタル教科書の現在地と今後の展望
naokikato
PRO
0
120
複数カメラ活用による授業の遠隔参観や収録コンテンツ開発の促進
naokikato
PRO
0
110
教育DXの推進に向けて
naokikato
PRO
0
62
個別最適な学びと協働的な学びから児童の学びを深めさせるICT機器の活用
naokikato
PRO
1
65
なぜDXが必要なのか 〜教育の情報化の現状と展望〜
naokikato
PRO
0
66
Other Decks in Education
See All in Education
反応する前に「受容する」力を鍛える。 自分の安全地帯🌱 を育てよう / Cultivating and sharing ventral vagal safety.
spring_aki
0
120
リモートリポジトリの操作 / 02-c-remote
kaityo256
PRO
0
130
PE array testbench data order (config)
songchch
0
250
Human Perception and Colour Theory - Lecture 2 - Information Visualisation (4019538FNR)
signer
PRO
0
3k
コマンドラインの使い方 / 01-d-cli
kaityo256
PRO
0
120
Gitの仕組みと用語 / 01-b-term
kaityo256
PRO
0
240
Introduction - Lecture 1 - Information Visualisation (4019538FNR)
signer
PRO
0
5.4k
Analysis and Validation - Lecture 4 - Information Visualisation (4019538FNR)
signer
PRO
0
2.6k
Sponsorship 2026 | VizChitra
vizchitra
2
160
この講義について / 00-setup
kaityo256
PRO
2
270
Introduction - Lecture 1 - Advanced Topics in Big Data (4023256FNR)
signer
PRO
2
2.3k
Highest and Best Use: Development Considerations for Land Sites
rmccaic
0
180
Featured
See All Featured
Design and Strategy: How to Deal with People Who Don’t "Get" Design
morganepeng
133
19k
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.2k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
27
3.4k
End of SEO as We Know It (SMX Advanced Version)
ipullrank
3
4.1k
Automating Front-end Workflow
addyosmani
1370
200k
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.2k
Scaling GitHub
holman
464
140k
Reality Check: Gamification 10 Years Later
codingconduct
0
2.1k
Leveraging Curiosity to Care for An Aging Population
cassininazir
1
210
Breaking role norms: Why Content Design is so much more than writing copy - Taylor Woolridge
uxyall
0
240
KATA
mclloyd
PRO
35
15k
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
210
Transcript
©2016- Naoki Kato, IML at TGU 共通SE科目 東 東京 京学
学芸 芸大 大学 学 I IC CT Tセ セン ンタ ター ー 教 教育 育情 情報 報化 化研 研究 究チ チー ーム ム 加 加藤 藤直 直樹 樹 Programming Education in Elementary School 小学校における プログラミング教育 動かすプログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミング 動かすプログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミングの例
©2016- Naoki Kato, IML at TGU 道順プログラミング Hour of code
l パズルゲーム型ブロックプログラミング https://hourofcode.com/code
©2016- Naoki Kato, IML at TGU 道順プログラミング タンジブルプログラミング 左上写真:プログラミングロボ コード・A・ピラー
https://www.coporii.com/?pid=113251915 右上写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html 下左写真:GIZMODO https://www.gizmodo.jp/2016/03/3cubetto.html 下右写真:プログラミング+ https://ascii.jp/elem/000/001/265/1265712/
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 1年生活・課程外 小金井市立前原小
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 低学年生活・課程外 小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 道順プログラミング アンプラグドでゴールをめざせ 3年社会 町田市立第五小学校
1年課程外 奥多摩町立古里小学校
©2016- Naoki Kato, IML at TGU 道順プログラミング ブロックプログラミングでゴールをめざせ
©2016- Naoki Kato, IML at TGU 道順プログラミングのタイプ
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ1 ❌ ❌
❌ G 前に一歩 右を向く 左を向く
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ2 ❌ ❌
❌ G 前に一歩 右に一歩 左に一歩 後に一歩
©2016- Naoki Kato, IML at TGU 道順プログラミング コード・A・ピラーなどはタイプ3 G 前進
右折 左折
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのポイント l タイプ1,タイプ3は向きの感覚が必要
l 使える命令で,道順が変化 ❌ ❌ ❌ G プログラミング の本質 でもある
©2016- Naoki Kato, IML at TGU うまくいく道順プログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミング プログラムが確認できること l できないと,意図通り動かなかった時
l 正しい試行錯誤につながらない 写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html プログラムが 間違っていた? 実は入力が 間違っていた?
©2016- Naoki Kato, IML at TGU 道順プログラミング 安定してうごくこと l うごかないと,意図通り動かなかった時
l 正しい試行錯誤につながらない プログラムが 間違っていた? たまたま うまく 動かなかった?
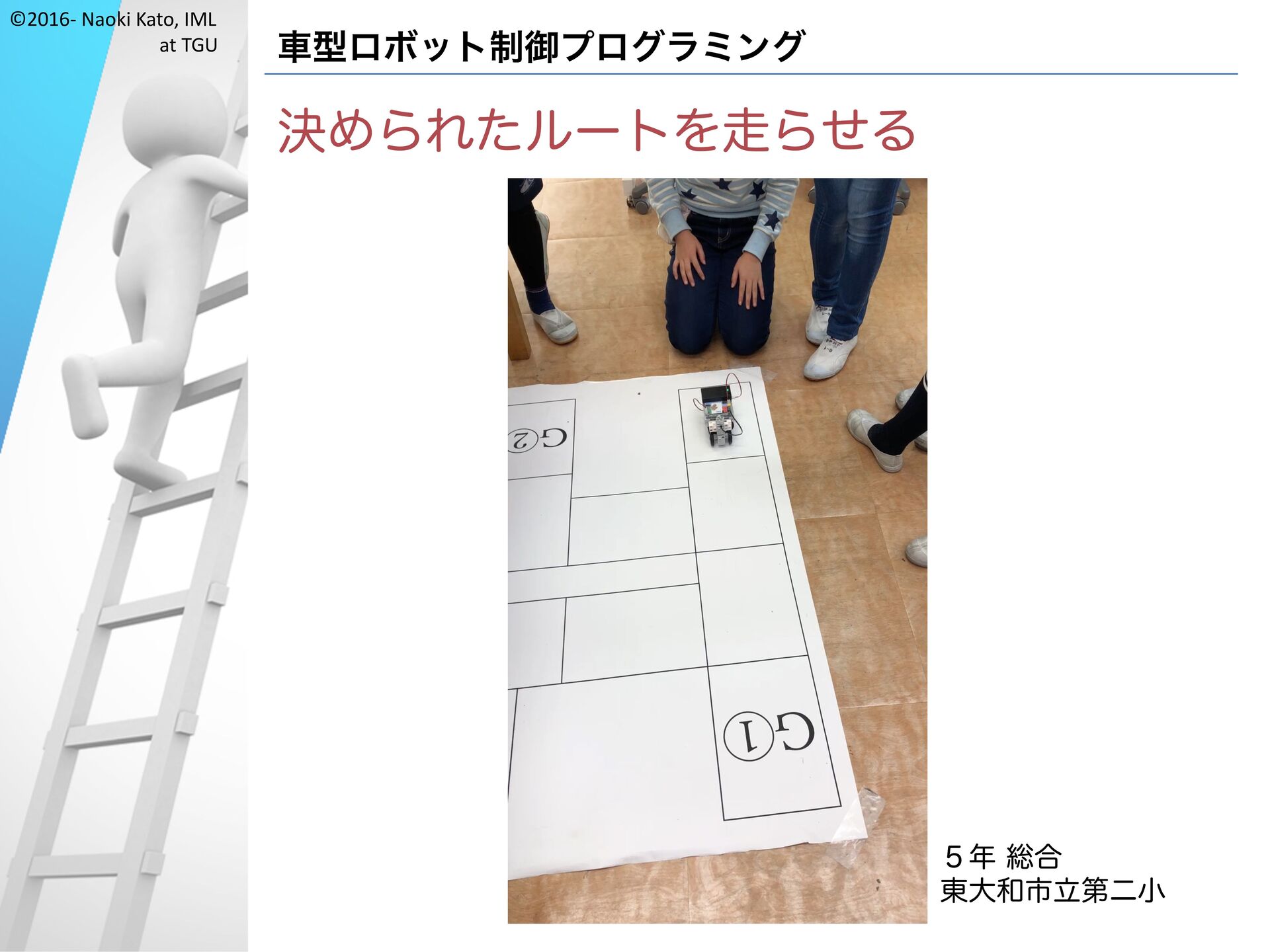
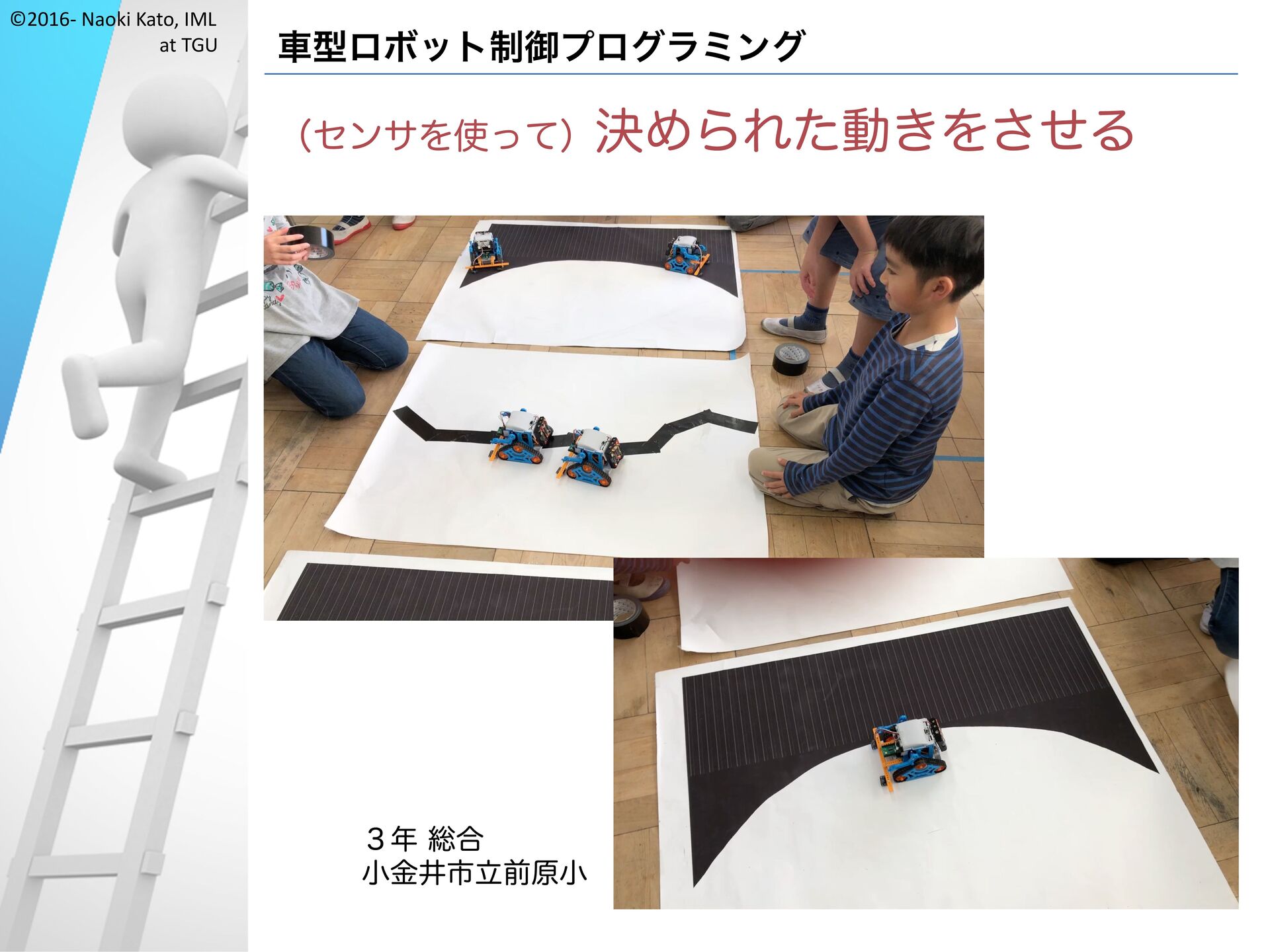
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 動かすプログラミング
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 決められたルートを走らせる 5年 総合
昭島市立中神小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 決められたルートを走らせる 5年 総合
東大和市立第二小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)決められた動きをさせる 3年 総合
小金井市立前原小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)考えたルートを走らせる 5年 総合
小金井市立前原小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング ロボット制御プログラミングのポイント l 誤差を許容させる声かけ・手だてが重要
ある程度の誤差を 許容するコース
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 動かすプログラミング
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 かっこいい動きを創作する 5年 総合
東大和市立第二小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 相手を押し出す動きを考える 6年 課程外
小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 楽しい動きを創作する(光のパレード) 6年 図工
町田市立第五小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 楽しい動きを創作する(光のパレード) 6年 図工
小平第三小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(倍数・公倍数) 小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(速さと時間と道のり) モータの誤差が(^^;;;;;
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 理科に使ってみる(テコの原理) 小金井市立前原小学校
©2016- Naoki Kato, IML at TGU おしまい 動かすプログラミング
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}