Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
nekoIoTLT_SearchBlackObject
Search
NearMugi
October 21, 2020
Technology
710
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
nekoIoTLT_SearchBlackObject
NearMugi
October 21, 2020
More Decks by NearMugi
See All by NearMugi
nekoIoTLT_NearMugiLLM
nearmugi
0
420
nekoIoTLT_CatAndColorSensor
nearmugi
0
980
VisualProgramming_GoogleHome_LINE
nearmugi
1
630
EnebularMeetup_GoogleCalendar
nearmugi
0
310
nekoIoTLT_ToyAndVoiceAnalysis
nearmugi
0
410
nekoIoTLT_Demachi
nearmugi
0
470
nekoIoTLT_nekoDeeplearning
nearmugi
0
360
nekoIoTLT_nekoGohan
nearmugi
0
580
nekoIoTLT_Tsumetogi
nearmugi
1
750
Other Decks in Technology
See All in Technology
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
170
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
4
2.5k
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
550
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
380
Type-safe IaC for Dart
coborinai
0
180
AI時代におけるエンジニアの新たな役割──FDEとクオリアの探求/登壇資料(戸井田 裕貴)
hacobu
PRO
0
330
発表と総括 / Presentations and Summary
ks91
PRO
0
190
Aurora MySQL 8.4リリース! Rubyistが備えること / what-rubyist-should-prepare-for-aurora-mysql-8-4
fkmy
0
790
AI Native なプロダクト組織の立ち上げ方 : 生産性 100 倍への挑戦
mikesorae
0
1.3k
AI工学特論: MLOps・継続的評価
asei
6
1.3k
Multicaで30個のミニプロジェクトをAIエージェント運用して見えてきたこと
eiei114
1
630
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
310
Featured
See All Featured
From π to Pie charts
rasagy
0
240
Technical Leadership for Architectural Decision Making
baasie
3
440
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Information Architects: The Missing Link in Design Systems
soysaucechin
0
1k
Crafting Experiences
bethany
1
230
YesSQL, Process and Tooling at Scale
rocio
174
15k
It's Worth the Effort
3n
188
29k
Mozcon NYC 2025: Stop Losing SEO Traffic
samtorres
1
410
Building the Perfect Custom Keyboard
takai
2
820
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.9k
AI in Enterprises - Java and Open Source to the Rescue
ivargrimstad
0
1.4k
Transcript
トイレにある黒い物体を検知する 2020.10.21 夜開催! ねこIoTLT vol.4
自己紹介 NearMugi(ニアムギ) ねこ2匹飼っています。
ねこ紹介 ニア ・3月8日生まれ 11歳 ・もふもふでかわいい ・寒くなってきたのでさらにもふもふに
ねこ紹介 ムギ ・5月8日生まれ 8歳 ・黒猫でかわいい ・メーメー鳴く ・この子も少し毛が伸びた
イントロ みなさんのおうちでこんなこと ありませんか?
イントロ ねこがトイレの前でじっとしている…
イントロ トイレを見てみると中に 黒い物体が。
イントロ 「これを取ってくれ」と言わんばかりに 立っている。
イントロ すぐに取ってあげたい。 気づいてあげたい。
イントロ IoTで解決してみます。
1.トイレの様子を定期的に撮影 2.撮影した画像から黒い物体を検知 3.LINEで通知 大まかな手順
・30分ごとに撮影する ・部屋の明るさの変化を考慮する ・前回撮影した画像と似ている場合は通知しない ・機械学習は使わずに黒い物体を検知する 細かい仕様
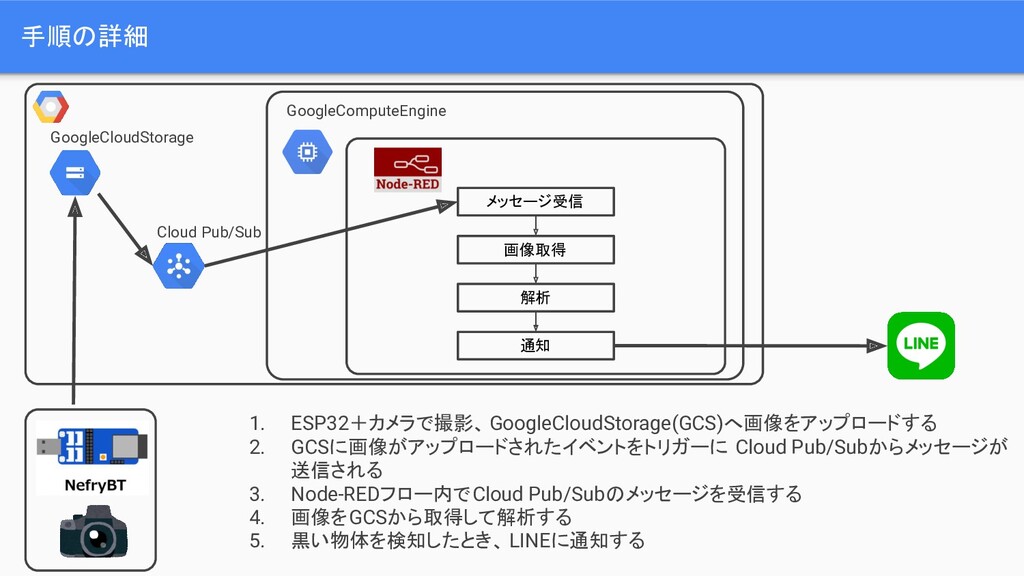
1. ESP32+カメラで撮影、GoogleCloudStorage(GCS)へ画像をアップロードする 2. GCSに画像がアップロードされたイベントをトリガーに Cloud Pub/Subからメッセージが 送信される 3. Node-REDフロー内でCloud Pub/Subのメッセージを受信する
4. 画像をGCSから取得して解析する 5. 黒い物体を検知したとき、 LINEに通知する 手順の詳細 GoogleCloudStorage Cloud Pub/Sub GoogleComputeEngine メッセージ受信 画像取得 解析 通知
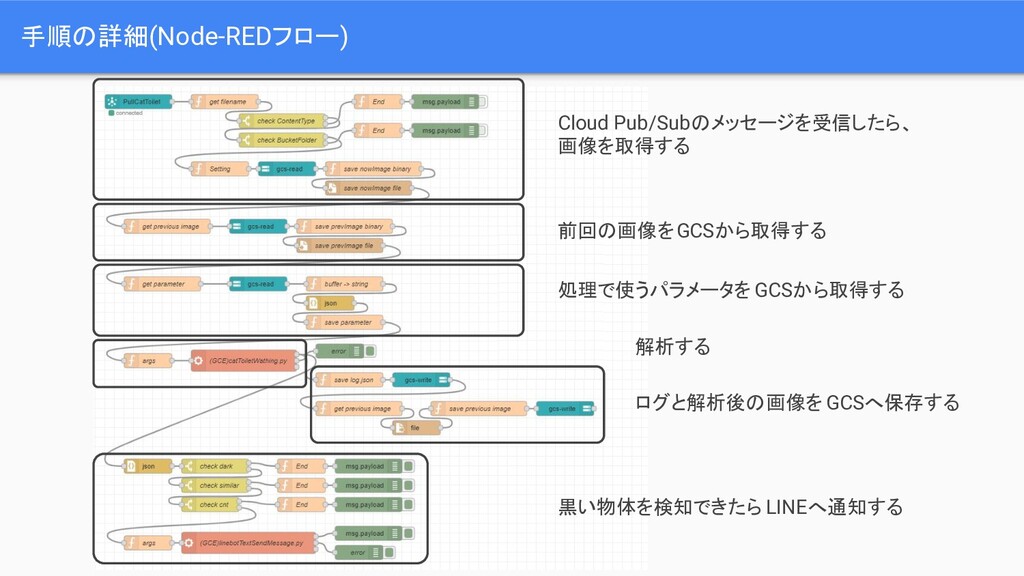
Cloud Pub/Subのメッセージを受信したら、 画像を取得する 手順の詳細(Node-REDフロー) 前回の画像をGCSから取得する 処理で使うパラメータを GCSから取得する 解析する ログと解析後の画像を GCSへ保存する
黒い物体を検知できたら LINEへ通知する
黒い物体の検知方法 黒い物体を検知するため OpenCVを使いました
黒い物体の検知方法 カメラで撮った画像 → 2値化(白黒)→白黒反転→輪郭を検出→面積を取得 → 面積の大きさから黒い物体があるか判断 画像から黒い物体を検知するまでの処理
黒い物体の検知方法 adaptiveThreshold : 画像をいい感じに2値化(白黒)する findContours : 黒い背景から白い物体の輪郭を検出する contourArea : 輪郭内の面積を取得する
OpenCVの関数
黒い物体の検知方法 -関数の説明(adaptiveThreshold) 元画像 void adaptiveThreshold(const Mat& src, Mat& dst, double maxValue,
int adaptiveMethod, int thresholdType, int blockSize, double C) 定数Cを変化させることで、白黒の範囲を調整できる C:10 白黒割合:0.29 C:20 白黒割合:0.23 C:30 白黒割合:0.18 C:40 白黒割合:0.13 C:60 白黒割合:0.06 C:70 白黒割合:0.04 C:80 白黒割合:0.03 C:90 白黒割合:0.02 C:50 白黒割合:0.09 ここらへんがちょうど良い
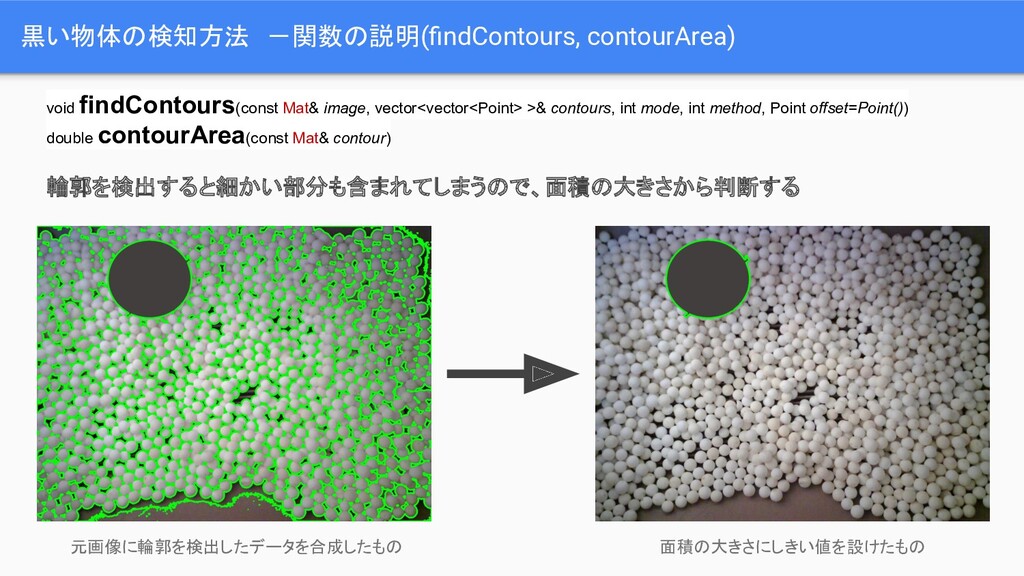
黒い物体の検知方法 -関数の説明(findContours, contourArea) void findContours(const Mat& image, vector<vector<Point> >& contours, int
mode, int method, Point offset=Point()) double contourArea(const Mat& contour) 輪郭を検出すると細かい部分も含まれてしまうので、面積の大きさから判断する 元画像に輪郭を検出したデータを合成したもの 面積の大きさにしきい値を設けたもの
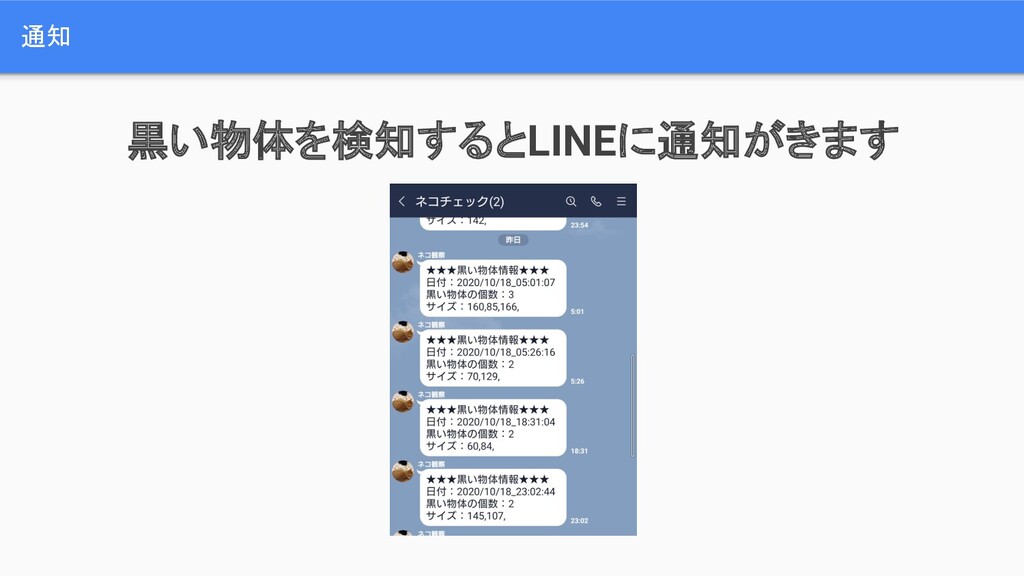
通知 黒い物体を検知するとLINEに通知がきます
結果 検出結果をお見せしたいのですが、 黒い物体があれなので 今回は控えさせていただきます。 そこそこの検出具合でした。 明るさの調整が一番難しいです。
黒い物体の検知のポイント 白黒がはっきりしていると検知しやすいので、 大玉の猫砂がおすすめです
まとめ ・機械学習を使わなくてもある程度の検知が出来ると知りました。 照度センサーなどの補助があればもう少し精度が上がりそうです。 ・検知しやすくさせるため砂を平らにならしたり、砂の汚れ具合を 気にするようになりました。 以上となります。 ご清聴ありがとうございました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}